







模糊自适应整定PID控制(Fuzzy Adaptive PID Control)是一种结合了模糊逻辑和自适应PID控制的方法。它的主要特点是利用模糊逻辑系统来根据系统的当前状态自适应地调整PID参数(比例增益 KpK_pKp、积分增益 KiK_iKi、微分增益 KdK_dKd)。这种方法能够克服传统PID控制器在面对系统动态变化和不确定性时的局限性,提高系统的鲁棒性和适应性。
1. 模糊自适应PID控制的基本思想
在传统PID控制中,PID参数通常是固定的或者通过某些调节方法手动设置。然而,这种静态的设置可能无法应对系统的动态变化和复杂性。模糊自适应PID控制结合了模糊控制和自适应PID控制的优点,可以根据系统的实时反馈动态调整PID控制器的参数,从而实现更好的控制性能。
-
模糊逻辑:模糊逻辑是一种处理不确定性和模糊性的数学方法。它通过模糊规则将输入输出量映射到模糊集合,然后使用模糊推理机制计算输出。模糊逻辑非常适用于处理不精确的系统信息。
-
自适应PID:自适应PID控制通过实时调整PID控制器的增益来适应系统的动态变化。在模糊自适应PID控制中,PID的增益是根据误差和误差变化率等输入信息,通过模糊规则动态调整的。
2. 模糊自适应PID控制的工作原理
模糊自适应PID控制器的工作原理可以分为以下几个步骤:
(1) 传统PID控制
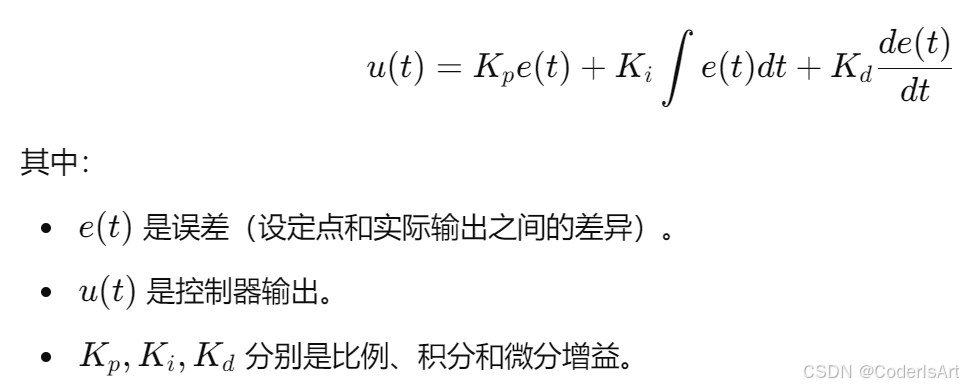
首先,控制器按照传统的PID公式进行计算:
(2) 使用模糊逻辑来调整PID增益
模糊自适应PID控制器通过模糊推理系统根据当前误差和误差变化率来调整PID参数。系统会评估两个主要变量:
- 误差 e(t)e(t)e(t):当前的设定点与实际输出的差值。
- 误差变化率 Δe(t)\Delta e(t)Δe(t):误差的变化速率。
根据这两个变量,模糊控制系统会使用一组预定义的模糊规则(例如“如果误差大且误差变化率大,则增大比例增益”)来调整PID增益。
(3) 模糊控制规则
模糊控制规则通常是基于专家经验的。例如:
- 如果误差较大,增加比例增益。
- 如果误差变化率较大,增加微分增益。
- 如果误差较小,可以减少积分增益,以防止积分过大。
这些规则通过模糊推理机制来动态计算出PID参数的增益调整量。
(4) 生成PID控制信号
一旦PID增益被调整,控制器会重新计算控制信号,从而实现对系统的动态控制。
3. 模糊自适应PID控制的优点
模糊自适应PID控制具有以下优点:
(1) 自适应性强
模糊自适应PID控制能够根据系统的反馈自动调整PID增益,以适应系统动态变化的需求。控制器在面对系统状态变化或扰动时,能够自动进行调整,从而优化控制效果。
(2) 处理不确定性
模糊逻辑能够有效处理系统中存在的不确定性和模糊性。例如,某些系统的特性可能不完全精确,模糊控制可以通过规则对这些不确定性进行建模和控制。
(3) 提高系统鲁棒性
通过调整PID参数,模糊自适应PID控制能够提高系统的鲁棒性,在面对外部扰动和系统变化时仍然能够保持较好的控制性能。
(4) 避免传统PID的固有问题
传统PID控制器的调节通常是基于固定的增益,而模糊自适应PID控制可以根据实时反馈动态调整PID参数,从而避免了固定增益带来的性能下降(例如,过大的超调或响应过慢)。
4. 模糊自适应PID控制的实现
(1) 模糊控制器的设计
模糊控制器通常包含以下部分:
- 模糊化(Fuzzification):将输入信号(例如误差和误差变化率)转换为模糊集合。
- 推理(Inference):使用模糊规则进行推理,得到控制增益的调整量。
- 去模糊化(Defuzzification):将推理结果转换为清晰的PID增益调整量。
(2) 模糊规则
通常的模糊规则可能包括如下内容:
- 如果误差很大且误差变化很大,则比例增益和微分增益都增大。
- 如果误差很小且误差变化很小,则积分增益减小。
- 如果误差中等,则适当调整比例增益。
(3) 模糊控制器的输入输出
输入:
- 误差 e(t)e(t)e(t):设定点和实际输出的差值。
- 误差变化率 Δe(t)\Delta e(t)Δe(t):误差随时间的变化。
输出:
- PID参数调整量:即调整后的 KpK_pKp, KiK_iKi, KdK_dKd。
5. C++实现模糊自适应PID控制
以下是一个简单的模糊自适应PID控制器的C++实现示例。它使用模糊逻辑调整PID增益:
#include <iostream>
#include <cmath>
class FuzzyPIDController {
private:
double Kp, Ki, Kd; // PID增益
double prev_error; // 上一误差
double integral; // 积分项
double max_output; // 控制信号最大值
double min_output; // 控制信号最小值
public:
FuzzyPIDController(double Kp_init, double Ki_init, double Kd_init)
: Kp(Kp_init), Ki(Ki_init), Kd(Kd_init), prev_error(0), integral(0), max_output(100), min_output(-100) {}
// 模糊控制规则库(简单示例)
double fuzzyAdjustKp(double error) {
if (error > 5) return 2.0; // 错误很大时增加比例增益
if (error < 0.1) return 0.5; // 错误很小时减少比例增益
return 1.0; // 默认比例增益
}
double fuzzyAdjustKi(double error_rate) {
if (error_rate > 1.0) return 0.5; // 错误变化快时减少积分增益
return 1.0; // 默认积分增益
}
double fuzzyAdjustKd(double error, double error_rate) {
if (error > 5 && error_rate > 1.0) return 2.0; // 错误大且变化大时增加微分增益
return 1.0; // 默认微分增益
}
// 计算控制信号
double compute(double setpoint, double actual) {
double error = setpoint - actual;
double error_rate = error - prev_error; // 误差变化率
prev_error = error;
// 调整PID增益
Kp = fuzzyAdjustKp(error);
Ki = fuzzyAdjustKi(error_rate);
Kd = fuzzyAdjustKd(error, error_rate);
// 计算PID控制信号
integral += error; // 积分项
double derivative = error_rate; // 微分项
double control_signal = Kp * error + Ki * integral + Kd * derivative;
// 限制输出范围
if (control_signal > max_output) control_signal = max_output;
if (control_signal < min_output) control_signal = min_output;
return control_signal;
}
};
int main() {
FuzzyPIDController controller(1.0, 0.1, 0.01);
double setpoint = 10.0; // 设定目标
double actual = 0.0; // 当前实际输出
for (int step = 0; step < 50; ++step) {
double control_signal = controller.compute(setpoint, actual);
actual += control_signal * 0.1; // 假设控制器输出对系统的影响
std::cout << "Step: " << step << ", Control Signal: " << control_signal << ", Actual Output: " << actual << std::endl;
}
return 0;
}
总结
模糊自适应PID控制通过结合模糊逻辑和自适应PID控制,使得控制器能够动态调整PID参数,以应对系统的非线性、时变性和不确定性。通过模糊推理规则,根据误差和误差变化率调整PID增益,可以提高系统的控制精度、响应速度和鲁棒性。

















 12万+
12万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









