







不太喜欢写理论,模糊PID的相关内容可以参考书籍《模糊控制系统及应用》,《先进PID控制MATLAB仿真》里也简单描述了一下基本理论。
简单来说,自适应模糊PID控制器以误差
e
e
e 和误差变化
e
c
ec
ec 作为模糊控制器的输入,利用模糊控制规则在线对PID参数进行调整,以满足不同时刻的
e
e
e 和
e
c
ec
ec 对PID参数自整定的要求。自适应模糊PID控制器系统结构如下图所示:
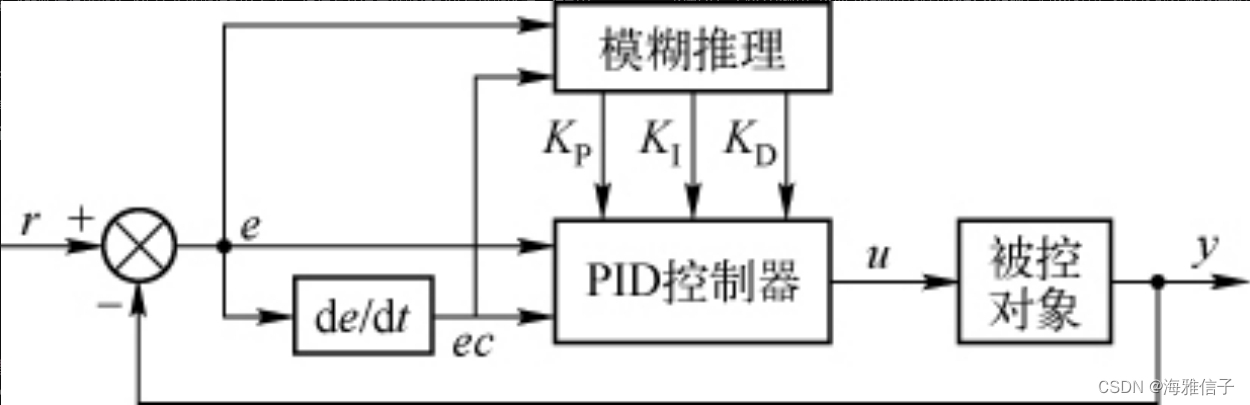
控制率和PID一样:
u
(
k
)
=
k
p
e
(
k
)
+
k
i
T
∑
k
e
(
j
)
+
k
d
1
T
(
e
(
k
)
−
e
(
k
−
1
)
)
u(k) = k_p e(k)+k_i T \sum^k e(j)+k_d \frac{1}{T}(e(k)-e(k-1))
u(k)=kpe(k)+kiT∑ke(j)+kdT1(e(k)−e(k−1))
δ
k
p
,
δ
k
i
,
δ
k
d
\delta kp, \delta ki, \delta kd
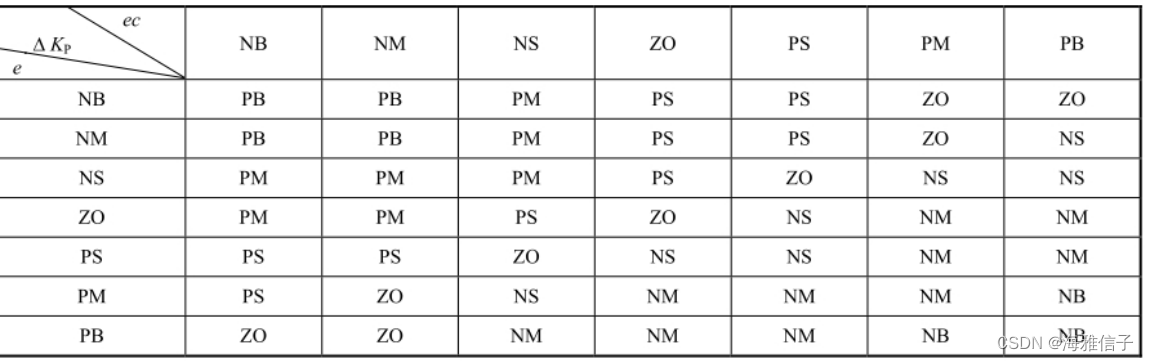
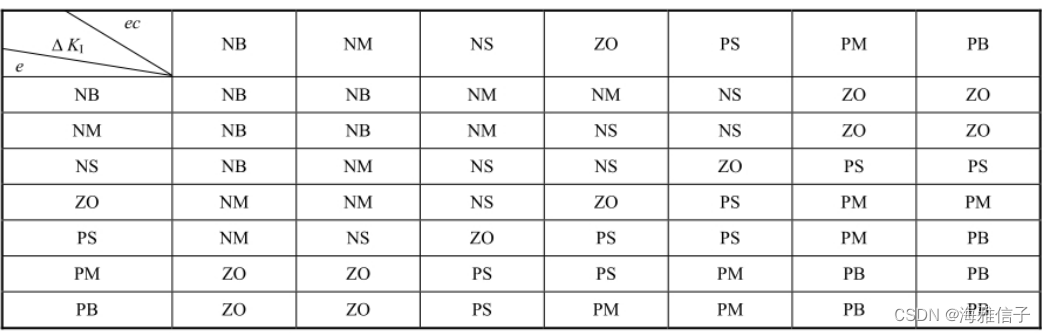
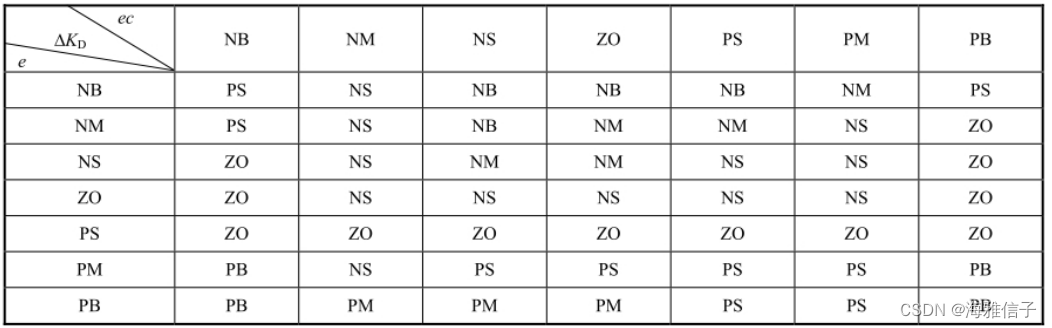
δkp,δki,δkd模糊规则如下:
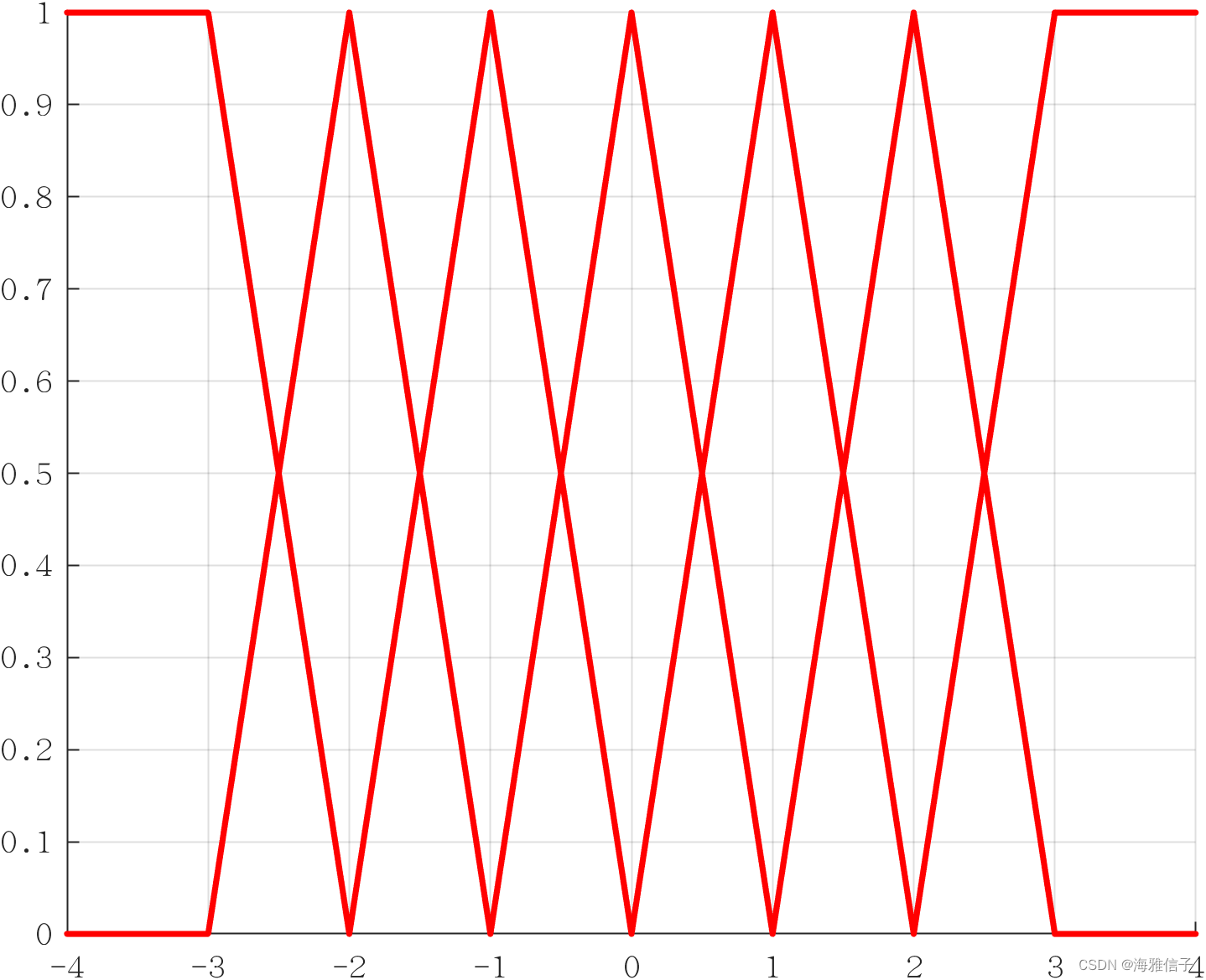
输入输出的隶属函数如下:
大致流程如下:
- 将 e e e 和 e c ec ec 值量化为论域值。
- 利用该论域值计算PID参数增量 δ k p , δ k i , δ k d \delta kp, \delta ki, \delta kd δkp,δki,δkd的论域值。
- 将PID参数增量论域值反量化为实际的增量值。
- 自调整PID参数。
假设控制对象为:
P
(
s
)
=
133
s
2
+
25
⋅
s
P(s) = \frac{133}{s^2+25\cdot s}
P(s)=s2+25⋅s133
代码如下(看懂就都会了):
FuzzyPID.m
% created by hyacinth on 2024/5/31
classdef FuzzyPID < handle
properties
e_max % 模糊集论域
e_min
ec_max
ec_min
delta_kpmax % pid参数增量最大最小值
delta_kpmin
delta_kimax
delta_kimin
delta_kdmax
delta_kdmin
dt
kp % pid参数
ki
kd
qdelta_kp % pid参数增量论域值
qdelta_ki
qdelta_kd
delta_kp % pid参数增量值
delta_ki
delta_kd
qerro % 误差相关论域值
qerro_c
pre_err % 前一时刻误差
erri % 积分项
threshold
e_gradmembership % 输入的隶属度,形状(1,2) or (1,1)
ec_gradmembership
e_grad_idx % 隶属度在模糊子集中的位置,形状(1,2) or (1,1)
ec_grad_idx
delta_kp_grad_sums % pid参数增量总隶属度,形状(1,7)
delta_ki_grad_sums
delta_kd_grad_sums
kp_rule_list % 模糊规则,形状(7,7)
ki_rule_list
kd_rule_list
e_membership_values % 输入输出的模糊子集,形状(1,7)
ec_membership_values
kp_menbership_values
ki_menbership_values
kd_menbership_values
end
methods
% 构造函数,初始化模糊系统
function obj = FuzzyPID(e_max,e_min,ec_max,ec_min,kp0,ki0,kd0, ...
delta_kpmax,delta_kpmin,delta_kimax,delta_kimin,delta_kdmax,delta_kdmin,threshold,dt)
obj.e_max = e_max;
obj.e_min = e_min;
obj.ec_max = ec_max;
obj.ec_min = ec_min;
obj.delta_kpmax = delta_kpmax;
obj.delta_kpmin = delta_kpmin;
obj.delta_kimax = delta_kimax;
obj.delta_kimin = delta_kimin;
obj.delta_kdmax = delta_kdmax;
obj.delta_kdmin = delta_kdmin;
obj.kp = kp0;
obj.ki = ki0;
obj.kd = kd0;
obj.qdelta_kp = 0;
obj.qdelta_ki = 0;
obj.qdelta_kd = 0;
obj.pre_err = 0;
obj.erri = 0;
obj.threshold = threshold;
obj.dt = dt;
NB = -3;
NM = -2;
NS = -1;
ZO = 0;
PS = 1;
PM = 2;
PB = 3;
obj.e_membership_values = [NB,NM,NS,ZO,PS,PM,PB];
obj.ec_membership_values = [NB,NM,NS,ZO,PS,PM,PB];
obj.kp_menbership_values = [NB,NM,NS,ZO,PS,PM,PB];
obj.ki_menbership_values = [NB,NM,NS,ZO,PS,PM,PB];
obj.kd_menbership_values = [NB,NM,NS,ZO,PS,PM,PB];
obj.kp_rule_list = [PB,PB,PM,PM,PS,ZO,ZO;
PB,PB,PM,PS,PS,ZO,NS;
PM,PM,PM,PS,ZO,NS,NS;
PM,PM,PS,ZO,NS,NM,NM;
PS,PS,ZO,NS,NS,NM,NM;
PS,ZO,NS,NM,NM,NM,NB;
ZO,ZO,NM,NM,NM,NB,NB];
obj.ki_rule_list = [NB,NB,NM,NM,NS,ZO,ZO;
NB,NB,NM,NS,NS,ZO,ZO;
NB,NM,NS,NS,ZO,PS,PS;
NM,NM,NS,ZO,PS,PM,PM;
NM,NS,ZO,PS,PS,PM,PB;
ZO,ZO,PS,PS,PM,PB,PB;
ZO,ZO,PS,PM,PM,PB,PB];
obj.kd_rule_list = [PS,NS,NB,NB,NB,NM,PS;
PS,NS,NB,NM,NM,NS,ZO;
ZO,NS,NM,NM,NS,NS,ZO;
ZO,NS,NS,NS,NS,NS,ZO;
ZO,ZO,ZO,ZO,ZO,ZO,ZO;
PB,NS,PS,PS,PS,PS,PB;
PB,PM,PM,PM,PS,PS,PB];
end
% 计算输入的隶属度及其在模糊子集中的位置
function get_grad_membership(obj, erro, erro_c)
if erro > obj.e_membership_values(1) && erro <= obj.e_membership_values(end)
for i = 1:length(obj.e_membership_values)-1
if erro > obj.e_membership_values(i) && erro <= obj.e_membership_values(i+1)
obj.e_gradmembership(1) = -(erro-obj.e_membership_values(i+1))/(obj.e_membership_values(i+1)-obj.e_membership_values(i));
obj.e_gradmembership(2) = 1+(erro-obj.e_membership_values(i+1))/(obj.e_membership_values(i+1)-obj.e_membership_values(i));
obj.e_grad_idx(1) = i;
obj.e_grad_idx(2) = i + 1;
end
end
else
if erro <= obj.e_membership_values(1)
obj.e_gradmembership(1) = 1;
obj.e_grad_idx(1) = 1;
elseif erro > obj.e_membership_values(end)
obj.e_gradmembership(1) = 1;
obj.e_grad_idx(1) = 7;
end
end
if erro_c > obj.ec_membership_values(1) && erro_c <= obj.ec_membership_values(end)
for i = 1:length(obj.ec_membership_values)-1
if erro_c > obj.ec_membership_values(i) && erro_c <= obj.ec_membership_values(i+1)
obj.ec_gradmembership(1) = -(erro_c- obj.ec_membership_values(i+1)) / (obj.ec_membership_values(i+1) - obj.ec_membership_values(i));
obj.ec_gradmembership(2) = 1+(erro_c - obj.ec_membership_values(i+1))/(obj.ec_membership_values(i + 1) - obj.ec_membership_values(i));
obj.ec_grad_idx(1) = i;
obj.ec_grad_idx(2) = i + 1;
end
end
else
if erro_c <= obj.ec_membership_values(1)
obj.ec_gradmembership(1) = 1;
obj.ec_grad_idx(1) = 1;
elseif erro_c > obj.ec_membership_values(end)
obj.ec_gradmembership(1) = 1;
obj.ec_grad_idx(1) = 7;
end
end
end
% 计算pid参数增量总隶属度
function getsumgrad(obj)
for i=1:7
obj.delta_kp_grad_sums(i) = 0;
obj.delta_ki_grad_sums(i) = 0;
obj.delta_kd_grad_sums(i) = 0;
end
for i=1:length(obj.e_grad_idx)
for j=1:length(obj.ec_grad_idx)
idx_kp = obj.kp_rule_list(obj.e_grad_idx(i),obj.ec_grad_idx(j)) + 4;
idx_ki = obj.ki_rule_list(obj.e_grad_idx(i),obj.ec_grad_idx(j)) + 4;
idx_kd = obj.kd_rule_list(obj.e_grad_idx(i),obj.ec_grad_idx(j)) + 4;
obj.delta_kp_grad_sums(idx_kp) = obj.delta_kp_grad_sums(idx_kp) + obj.e_gradmembership(i)*obj.ec_gradmembership(j);
obj.delta_ki_grad_sums(idx_ki) = obj.delta_ki_grad_sums(idx_ki) + obj.e_gradmembership(i)*obj.ec_gradmembership(j);
obj.delta_kd_grad_sums(idx_kd) = obj.delta_kd_grad_sums(idx_kd) + obj.e_gradmembership(i)*obj.ec_gradmembership(j);
end
end
end
% 获取pid参数增量论域值
function getout(obj)
obj.qdelta_kp = 0;
obj.qdelta_ki = 0;
obj.qdelta_kd = 0;
for i=1:7
obj.qdelta_kp = obj.qdelta_kp + obj.kp_menbership_values(i)*obj.delta_kp_grad_sums(i);
obj.qdelta_ki = obj.qdelta_ki + obj.ki_menbership_values(i)*obj.delta_ki_grad_sums(i);
obj.qdelta_kd = obj.qdelta_kd + obj.kd_menbership_values(i)*obj.delta_kd_grad_sums(i);
end
end
% 量化函数
function y = quantization(~,maxvalue,minvalue,x)
y = 6*(x-maxvalue)/(maxvalue-minvalue) + 3;
end
% 反量化函数
function y = inverse_quantization(~,maxvalue,minvalue,qvalues)
y = (maxvalue-minvalue)*(qvalues-3)/6 + maxvalue;
end
% 模糊pid控制主函数
function [pidout,kpout,kiout,kdout,erro_c] = fuzzypidcontroller(obj,erro)
erro_c = erro - obj.pre_err;
obj.qerro = obj.quantization(obj.e_max,obj.e_min,erro);
obj.qerro_c = obj.quantization(obj.ec_max,obj.ec_min,erro_c);
obj.get_grad_membership(obj.qerro,obj.qerro_c)
obj.getsumgrad()
obj.getout()
obj.delta_kp = obj.inverse_quantization(obj.delta_kpmax,obj.delta_kpmin,obj.qdelta_kp);
obj.delta_ki = obj.inverse_quantization(obj.delta_kimax,obj.delta_kimin,obj.qdelta_ki);
obj.delta_kd = obj.inverse_quantization(obj.delta_kdmax,obj.delta_kdmin,obj.qdelta_kd);
obj.kp = obj.kp + obj.delta_kp;
obj.ki = obj.ki + obj.delta_ki;
obj.kd = obj.kd + obj.delta_kd;
if obj.kp < 0
obj.kp = 0;
end
if obj.ki < 0
obj.ki = 0;
end
if obj.kd < 0
obj.kd = 0;
end
kpout = obj.kp;
kiout = obj.ki;
kdout = obj.kd;
pidout = obj.kp*erro + obj.ki*obj.erri + obj.kd*erro_c/obj.dt;
obj.erri = obj.erri + erro*obj.dt;
obj.pre_err = erro;
if abs(pidout) > obj.threshold
pidout = sign(pidout)*obj.threshold;
end
end
end
end
main.m
% created by hyacinth on 2024/5/31
clc
clear
close all
%%
fs = 2e3;
dt = 1/fs;
pnums = 133;
pdens = [1,25,0];
P = tf(pnums,pdens);
dP = c2d(P,dt,"t");
[pnumz,pdenz] = tfdata(dP,"v");
tend = 5;
N = (tend/dt);
t = (1:N)*dt;
amp = 1000;
yd = amp*sin(2*pi*1*t);
% yd = amp*ones(1,N);
kp0 = 0;
ki0 = 0;
kd0 = 0;
e_max = 0.05*amp; % needs to be adjusted, maybe
e_min = -e_max;
ec_max = 1/fs*amp; % needs to be adjusted, maybe
ec_min = -ec_max;
multi = 5e-4; % needs to be adjusted, maybe
delta_kpmax = multi*1e3;
delta_kpmin = multi*-1e3;
delta_kimax = multi*1e0;
delta_kimin = multi*-1e0;
delta_kdmax = multi*1e-3;
delta_kdmin = multi*-1e-3;
threshold = 5000;
fuzzypid = FuzzyPID(e_max,e_min,ec_max,ec_min,kp0,ki0,kd0, ...
delta_kpmax,delta_kpmin,delta_kimax,delta_kimin,delta_kdmax,delta_kdmin,threshold,dt);
zip = zeros(1,length(pdenz)-1);
u0 = 0;
for k = 1:N
[y(k),zip] = filter(pnumz,pdenz,u0,zip);
erro(k) = yd(k) - y(k);
[u(k),kp(k),ki(k),kd(k),erro_c(k)] = fuzzypid.fuzzypidcontroller(erro(k));
u0 = u(k);
end
figure
subplot(6,3,[1,4,7]);hold on;grid on
plot(t,yd,".-")
plot(t,y,".-")
legend("yd","y")
subplot(6,3,[10,13,16]);plot(t,u,".-");grid on;legend("u");
subplot(6,3,[2,5,8]);plot(t,erro,".-");grid on;legend("erro")
subplot(6,3,[11,14,17]);plot(t(2:end),erro_c(2:end),".-");grid on;legend("erro\_c")
subplot(6,3,[3,6]);plot(t,kp,".-");grid on;legend("kp")
subplot(6,3,[9,12]);plot(t,ki,".-");grid on;legend("ki")
subplot(6,3,[15,18]);plot(t,kd,".-");grid on;legend("kd")
















 1564
1564











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









