









终于开始写本行相关的东西了么,有点小激动
//个人侧重于人形机器人
实验室买了一台丹麦UniversalRobots(优傲机器人)公司产的UR3机械臂,欲搭配计算机视觉做一些东西,来谈谈自己的体会吧
看官网介绍确实挺高大上的,不多说先放两段宣传视频(压缩成俩GIF了):
其实机械臂也是我们挑的,网上盛传买机械臂要关注下面几个方面:
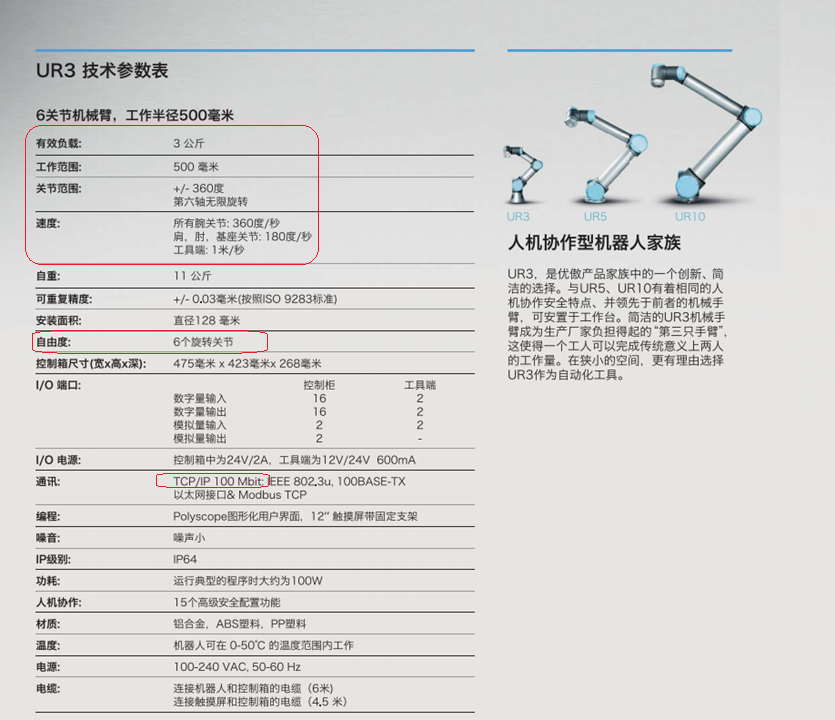
最大负载:因为机械臂一般都是要根据不同要求装上不同的抓手的,很多抓手的重量对机械臂的影响会超出预期,故而最大负载是一个很重要的指标。
自由度个数(4轴,6轴):自由度这个不用多说了
运动半径:机械臂运动的半径(一般标注的都是展平了的最大半径,上面的第二个动图可以看出)
速度:一般是指的机械臂里电机的最大转速
重复精度:对很多工厂来说这个是非常重要的,编好程序之后反复执行的多次之间误差有多少,这个对于流水线上用的机械臂来说非常重要(对我们并没有卵用……)
顺手贴上UR3的参数吧。
然后来谈下感受吧……
这是一个定位在人机协作的轻量级机械臂,我们买的还是最小的桌面级的UR3,大小大概就和人的上半身差不多,挺小巧的,展开之后半径有半米左右。
这款机械臂的理念还是非常好的,人机协作,不需要加护栏什么的,手板上调试好参数之后用力推机械臂也会紧急停止防止误伤。
但是当前绝大多数主流的机械臂,都是,用来,流水线上代替人的……所以,真的,开放度啊什么的SDK啊什么的……都!没!有!!!用那个破手板基本没有可能写出非常复杂的程序……
所以如果想买个机械臂回来搭建一套科研系统其实还是需要一定工作量的……
然而并没有现成的SDK可以用,所以只能自己做。
幸而还是开放TCP通讯的,故而可以用用python或者C++自己写一个TCP/IP通讯的程序发送手板用的脚本语言到机器人的固定IP……(官网为嘛不给呢,也确实,这方面目前的要求非常少)
其实做计算机视觉的都会觉得实时性非常重要,但机械臂接受指令的过程肯定是阻塞的,为了保证每次运动的精度与稳定性,也确实不能百毫秒级别地接受控制指令……
如果仅仅用机械臂完成某些固定的简单的动作还是可行的……
其实也有做好精度没有宣传的那么好的准备,所以也没有非常失望
之前一直觉得机械臂都是非常非常非常准的,鲁棒性非常高的,也确实,和NAO这种人形机器人想比机械臂精度真的高太多太多了,但也不能盲目自信……
一个小Demo,笔记本TCP通讯到机械臂用键盘控制机械臂……

附送的手板可以用来写一些让机械臂按照某种预设轨迹运动之类的简单程序(很多时候确实也只需要这么多),想要更多的更复杂的就需要TCP通讯了…(里面貌似就是个类linux系统,而且系统就装在U盘里,所以不想用手板慢慢写程序的话可以用电脑写完再用linux系统拷贝进U盘就好……)
最近这个项目停滞了,以后再多做些东西的时候再来多说几句。
祝大家干活儿愉快: )



















 6510
6510

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











