






三维点云pcd文件导入matlab显示代码
close all;
ptCloud = pcread('1-trans.pcd'); % 读取文件
figure('Name', 'mainfig', 'NumberTitle', 'off', 'Color','w');
hold on;
% 坐标轴系统设置
ax = gca;
ax.FontName = 'Arial'; % 字体匹配图片
ax.XColor = [0 0 0]; % 黑色坐标轴 % 从[0 0 0](黑)改为[1 1 1](白)
ax.YColor = [0 0 0];
ax.ZColor = [0 0 0];
ax.GridColor = [0.5 0.5 0.5]; % 网格线(关键修改) % [0.5 0.5 0.5]是中灰色
ax.GridAlpha = 0.7; % 网格可见度(关键修改) % 从0(全透明)改为0.5(半透明)
ax.XGrid = 'on'; % 显示X方向网格
ax.YGrid = 'on'; % 显示Y方向网格
ax.ZGrid = 'on'; % 显示Z方向网格
ax.Box = 'on'; % 显示包围盒(增强立体感)
ax.Layer = 'top'; % 确保网格显示在顶层
ax.Color = 'w'; % 坐标区背景白色(关键修改)
% 添加网格线样式增强
ax.GridLineStyle = '-'; % 实线样式
%ax.MinorGridLineStyle = ':'; % 次级网格线
ax.LineWidth = 1; % 坐标轴线宽
ax.GridLineWidth = 0.8; % 默认线宽0.5网格线线宽(单位:磅)
% 刻度设置
ax.XTick = -15:5:15;
ax.YTick = -10:5:15;
ax.ZTick = -4:4:8;
ax.XAxis.FontSize = 15; % 仅调整X轴
ax.YAxis.FontSize = 15; % 仅调整Y轴
%ax.ZAxis.FontSize = 15; % 仅调整Y轴
% 点云显示设置
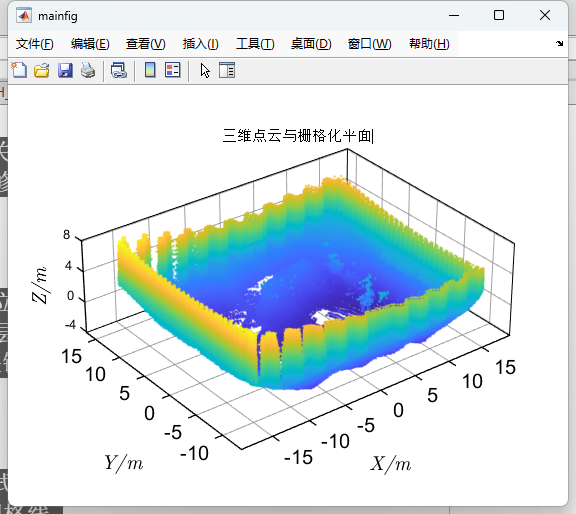
pcshow(ptCloud.Location, 'MarkerSize', 20, 'BackgroundColor', [1 1 1]);
xlabel('\it{X}/m', 'Interpreter', 'latex', 'FontSize', 15, 'Color','k');
ylabel('\it{Y}/m', 'Interpreter', 'latex', 'FontSize', 15, 'Color','k');
zlabel('\it{Z}/m', 'Interpreter', 'latex', 'FontSize', 15, 'Color','k');
title('三维点云与栅格化平面', 'Color','k');
% 视图与背景设置
view(3);
set(gcf, 'InvertHardcopy', 'off') % 保持背景颜色输出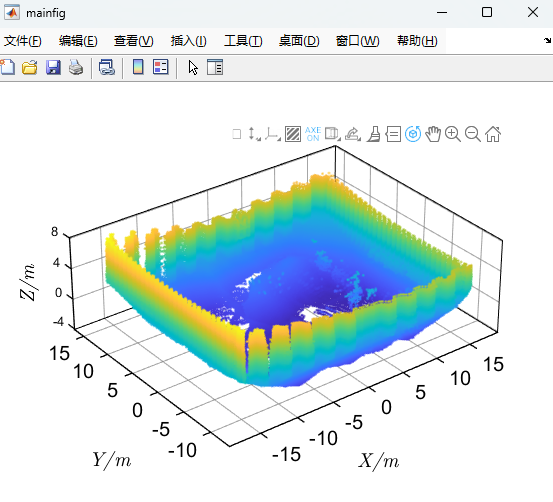
下面这张图片只使用了代码来显示
ptCloud = pcread('1-trans.pcd'); % 读取文件\
pcshow(ptCloud); 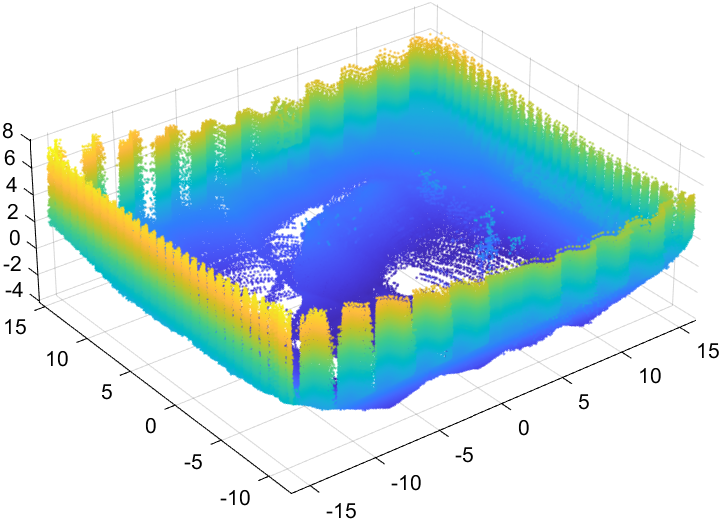

















 595
595

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









