







电机简介
电机俗称马达,是一种将电能转换为机械能或将机械能转换为电能的电磁设备。电机原理主要基于电磁感应定律,即法拉第电磁感应定律和楞次定律。人形机器人的关节就是使用各种电机实现驱动的。
电机在人形机器人中的作用
从价值量占比来看,电机在人形机器人核心零部件中的价值量占比高达 25%。以特斯拉人形机器人为例,其全身有 28 个执行器,部分执行器采用无框力矩电机,而灵巧手则使用空心杯电机。单台机器人装配 12 个空心杯电机(左右手各 6 个)。
电机分类
- 直流,使用直流电作为电源。
- 交流,使用交流电作为电源。
- 永磁
- 无刷
- 同步
- 伺服电机(空心杯电机属于特殊的伺服电机)
电机原理
磁铁相互作用力
-
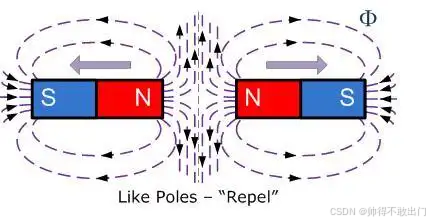
磁铁同性相斥,异性相吸产生动能
磁铁不同磁极靠近时,会有一个相同吸引的作用力,
磁铁当相同磁极靠近时,会有一个向反向的作用力,如下图
-
旋转力
把左边磁铁中央固定住做为转子,右边磁铁固定平放做为定子,
角度调整成有个夹角,不同极相斥发生旋转
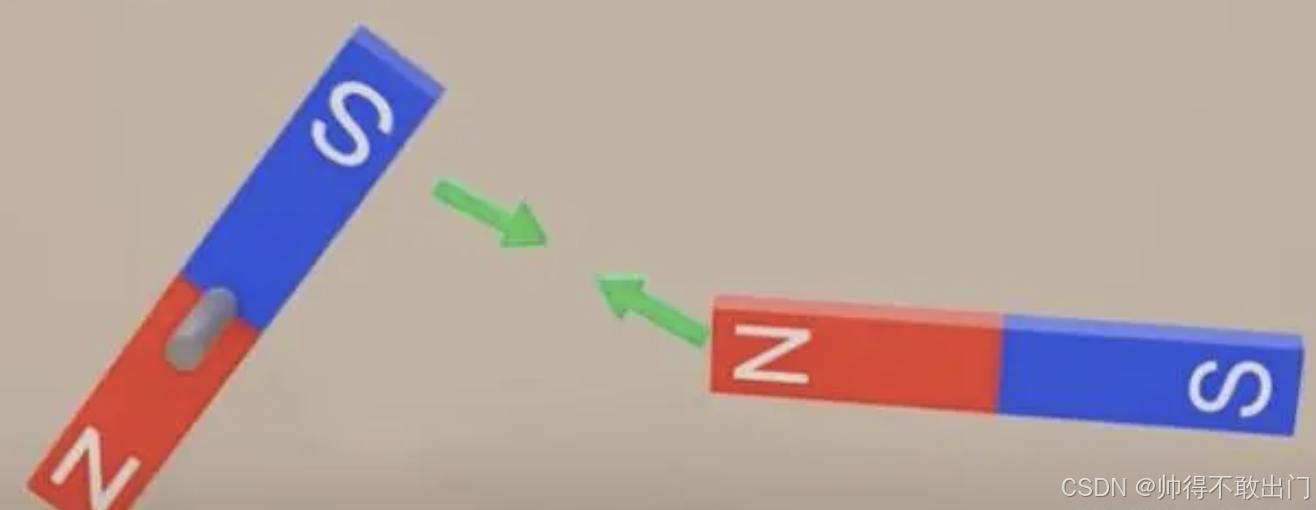
同极相斥时发生旋转。
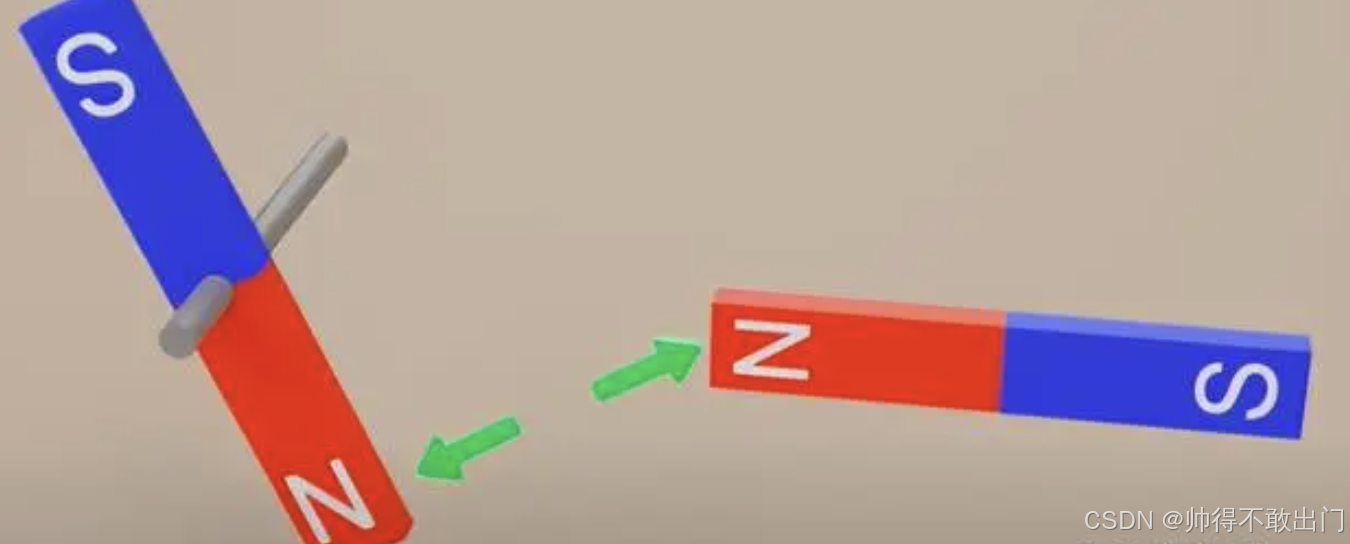
只要不停地有规律地改变右边磁极,就可以让左边磁铁持续旋转起来。 -
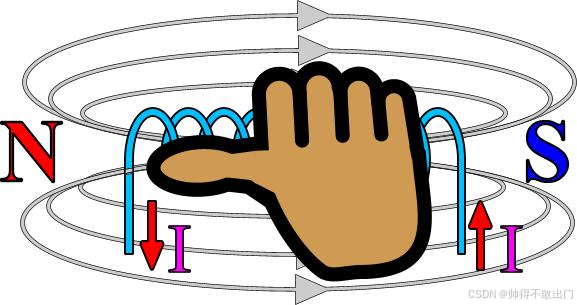
用螺线管通电模拟磁铁
通电螺线管形成磁铁功能,利用同性相斥,异性相吸来促成电机转动
通电螺线管中的安培定则(安培定则二):用右手握住通电螺线管,让四指指向电流的方向,那么大拇指所指的那一端是通电螺线管的N极, 可用通电螺线管来代替磁铁。
有刷直流电机
通电螺线管
- 结构
有刷电机的基本结构是:定子(磁极)、转子(线圈)、机械电刷(碳刷)及换向器。

- 原理
当电刷接触到转子时(螺线管),螺线管通电,会形成磁力,与定子组成的永磁铁作用,转子就会就会转动,转到后电刷就会与新的转子接触,形成磁力转动,如此循环。 - 实例
如下图

左右两边是两块永磁铁,左边是N极,右边是S极当定子,中间线圈A、B、C为转子,绿色两根接电,根端连接线圈做为电刷。
黑色箭头是电流方向,
粉色箭头方向指向为线圈生成磁场的N极,
左图:红色N与线圈B的N同性相斥,蓝色S与线圈C的N极异性相吸,产生虚线方向的力,使转子逆时针转动。
右图:同上,转子逆时针转动。
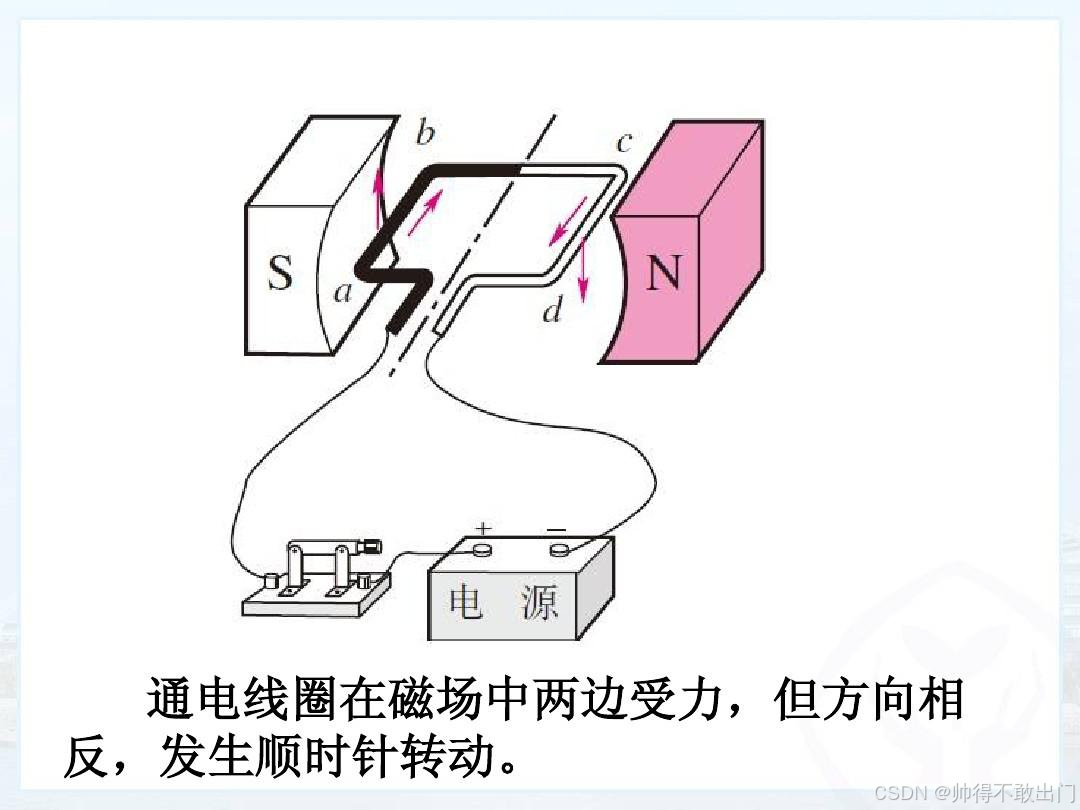
通电导线在磁场中的作用力
除了通电螺线管做为转子外,还可以使用通电环形导线来做为转子
- 通电导线
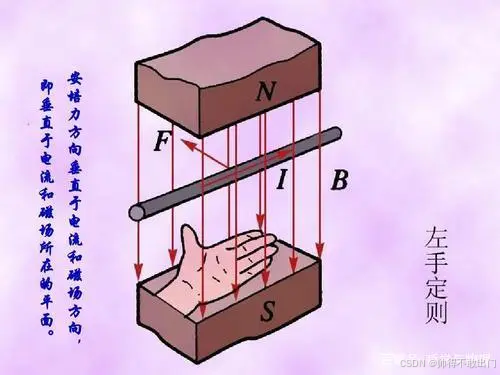
安培力
通电环形可以产生磁场,在两边放永磁铁,可以让环形动起来
左手定则
伸开左手,使大拇指跟其余四个手指垂直,并且都跟手掌在同一个平面内,把手放入磁场中,让磁感线垂直穿入手心,并使伸开的四指指向电流的方向,那么,大拇指所指的方向,就是通电导线在磁场中的受力方向。
- 通电环形导线
通电环形导线电流方向与受到的力作用方向如下图,
安培力左边向上,右边向上,
优缺点
优点:
- 控制简单
- 结构简单
缺点:
- 噪声大
- 寿命短,电刷与换向器摩擦导致容易损坏。
- 不适合高速场景
无刷电机
有刷直流电机因为要电刷与转子接触,会产生摩擦,易产生噪声及损坏。
把永磁铁做为转子,通电线圈做为定子,有续控制线圈使磁铁持续转起来,形成无刷电机。
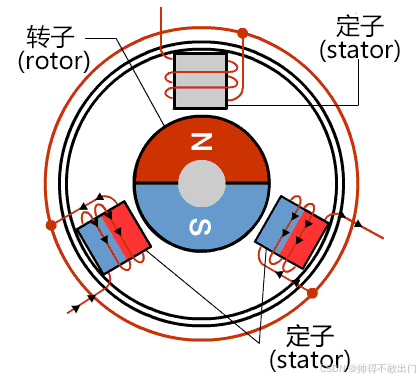
定子通电形成磁力,推/拉动转子转动,动态图如下

优缺点
优点
- 高效率:无刷电机的效率通常比有刷电机更高,因为它不需要电刷和换向器,减少了摩擦和能量损失。
- 长寿命:无刷电机的寿命通常比有刷电机更长,因为它没有电刷和换向器的磨损,减少了故障的可能性。
- 低噪音:无刷电机的噪音通常比有刷电机更低,因为它没有电刷和换向器的摩擦声。
缺点
- 成本高
- 技术复杂性
- 过载能力相对较弱



















 1194
1194

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











