







目录
Design of fruit picking manipulator
果实采摘机械手的设计
摘要:果实采摘工作具有较强的复杂性和较低的自动化程度,目前国内水果的采摘工作主要靠手工完成。21世纪是农用机械化向智能自动化机械过渡的关键时期,工业智能自动化对现代农业发展规模化、多样化和精确化十分重要。本文针对小型柑橘进行采摘机械手的设计,实现果实的全程自动化采摘。
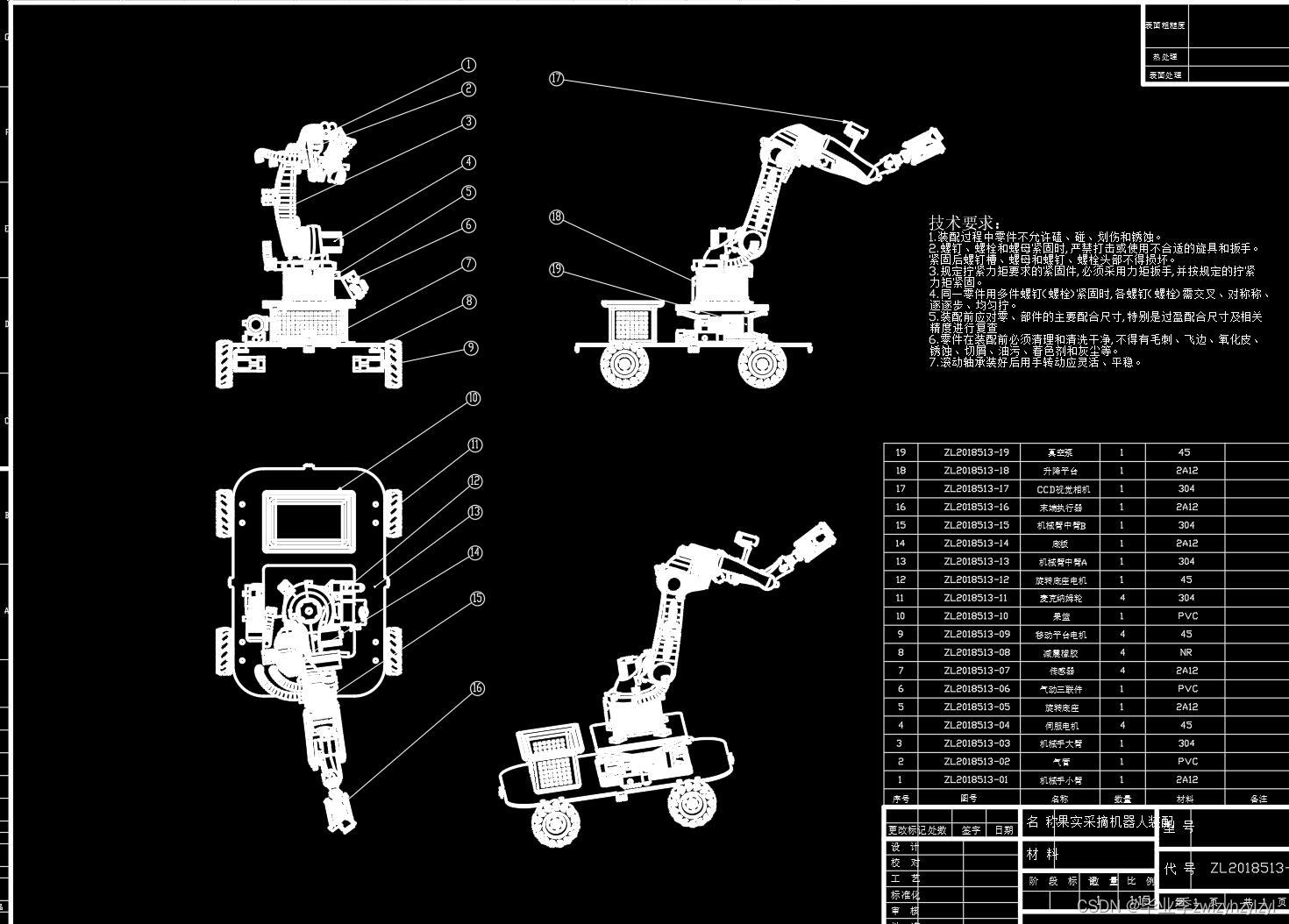
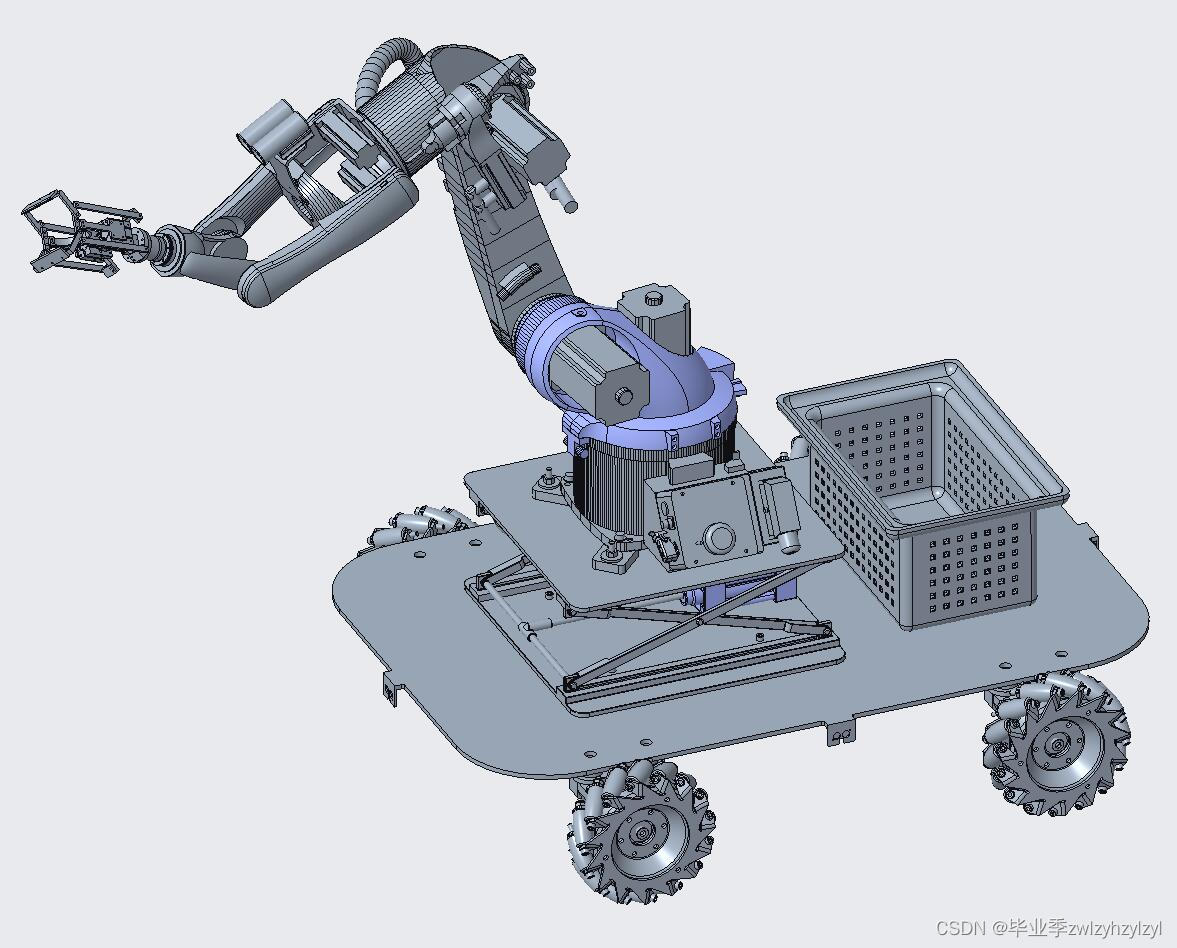
本文通过对果实采摘机械手的采摘环境和采摘特点进行分析,提出一种六自由度小型柑橘采摘串联机械手。通过设计3种末端执行器机械结构,使得机械手具有多用途作用,并将机械手与相关辅助装置相结合,实现整个柑橘果园采摘过程的自动化。该机构解决了人们采摘高处果实难、果实采摘工作量大和人工采摘具有一定危险性等缺点,实现了小型柑橘等多种果实不受物理损伤的自动化采摘。
关键词:工业机器人;果实采摘机器人;机械手;
…………


















 1544
1544

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









