







目录
1. 扩展卡尔曼滤波算法
1.1 扩展卡尔曼滤波算法简单介绍
对于非线性滤波问题,传统的线性卡尔曼滤波无法对其进行有效得解决,通常的处理方法是利用线性化技巧将非线性滤波问题转化为一个近似的线性滤波问题,套用线性滤波理论得到求解原非线性滤波问题的次优滤波算法,其中最常用的线性化方法是泰勒级数展开,所得到滤波方法是扩展卡尔曼滤波(Extended Kalman Filter, EKF)算法。
1.2 扩展卡尔曼滤波算法流程

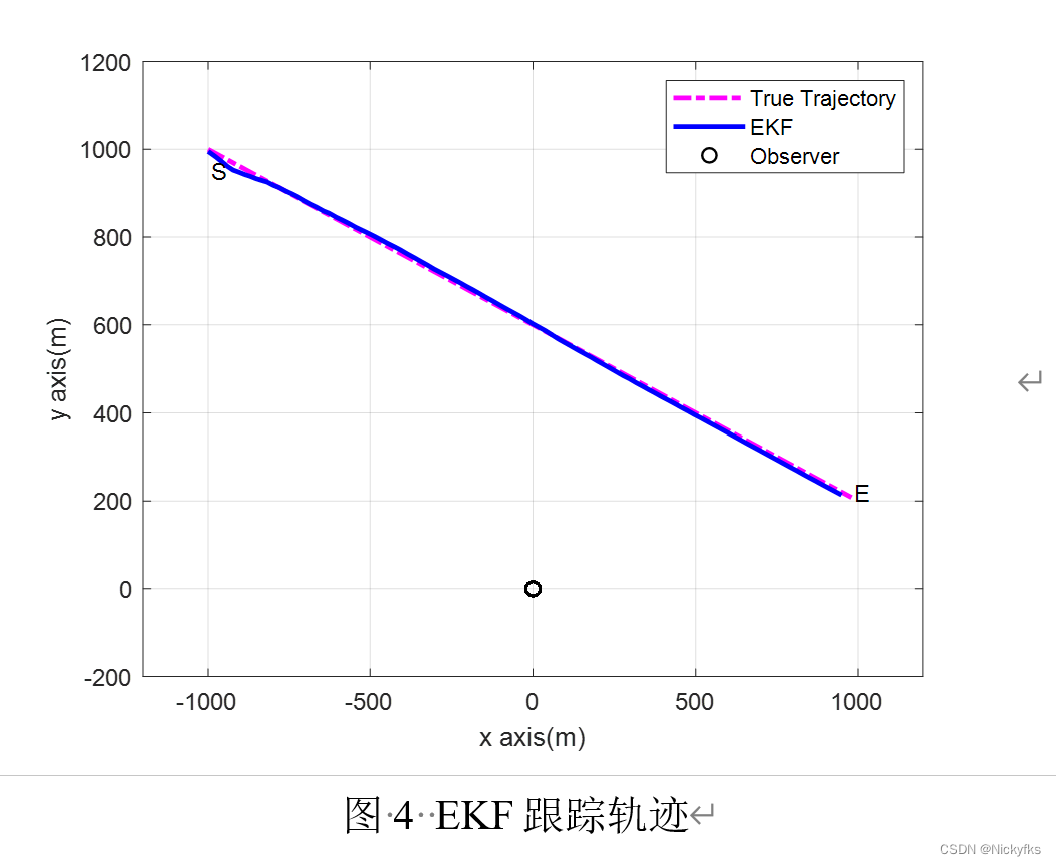
1.3 扩展卡尔曼滤波算法仿真分析
仿真条件:
假设一目标在二维平面内做匀速直线运动,观测站处于原点且保持静止,无站址误差。观测站可以实时测量到目标与观测站之间的距离以及方位角(北偏东)。蒙特卡洛仿真100次,并将RMSE与CRLB进行对比。
| 目标初始状态 | 量测误差 | 过程噪声 | |
| 二维 | (-1000m,1000m,20m/s,-8m/s) | 100m,1° | 1e-4m/s2 |

2.参考文献
何友、修建娟、关欣. 雷达数据处理及应用 [M]. 电子工业出版社, 2013.

















 1689
1689











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











