







目录
1.扩展粒子滤波算法
1.1 扩展粒子滤波算法简单介绍
结合EKF的粒子滤波称为EPF(Extended Particle Filter, EPF)。
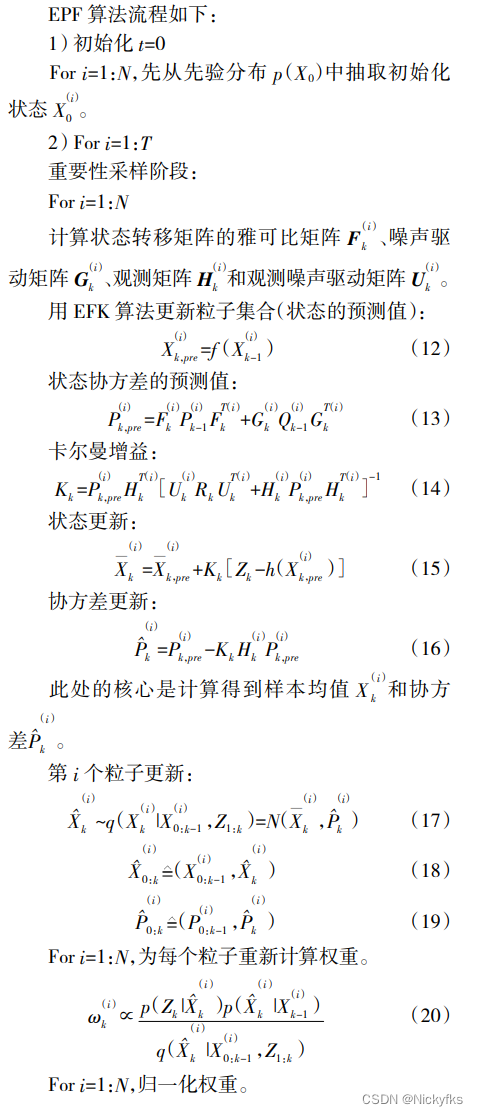
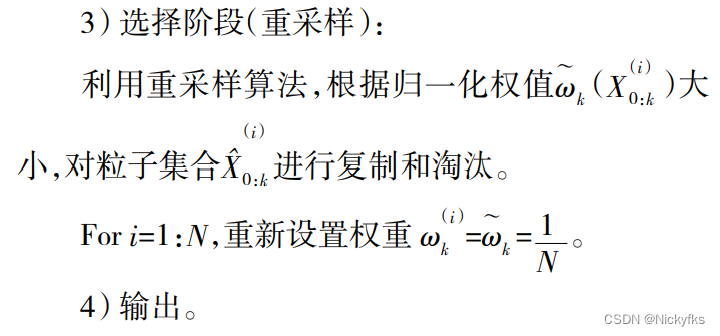
1.2 扩展粒子滤波算法流程
2.无迹粒子滤波算法
2.1 无迹粒子滤波算法简单介绍
粒子滤波的核心是合理选择推荐概率密度,推荐密度选择得与真实密度越接近,滤波效果越好,反之越差,甚至发散。如果粒子滤波与UPF结合起来,推荐密度由UKF确定,则可以解决粒子退化问题,又能使粒子更新时获得量测量的最新后验信息,有利于粒子移向似然比高的区域。结合UKF的粒子滤波称为UPF(Unscented Particle Filter, UPF)。
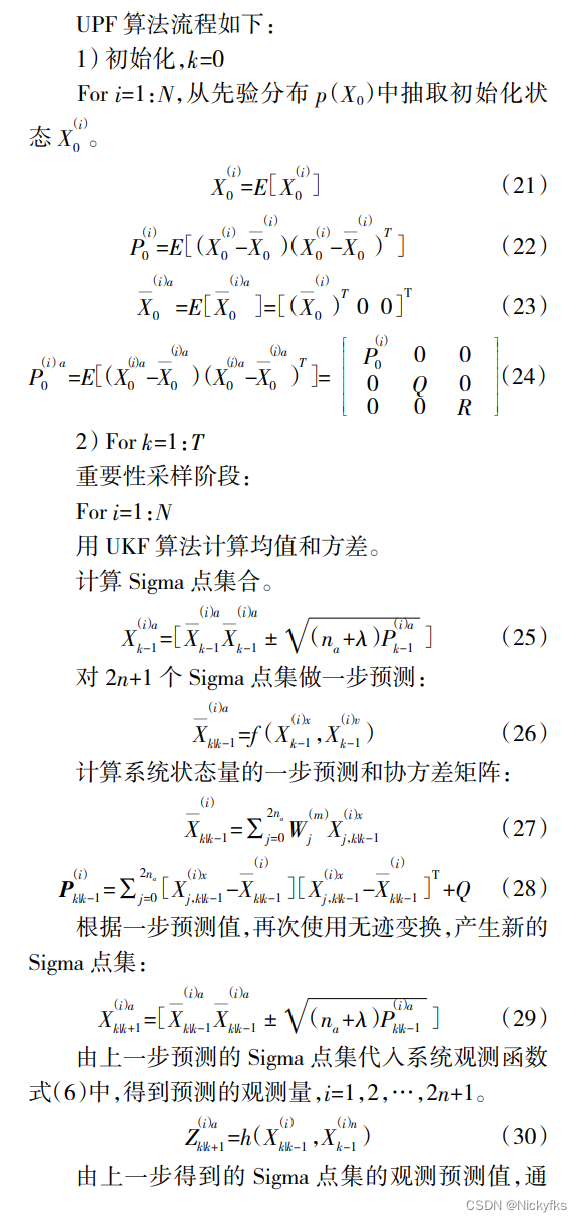
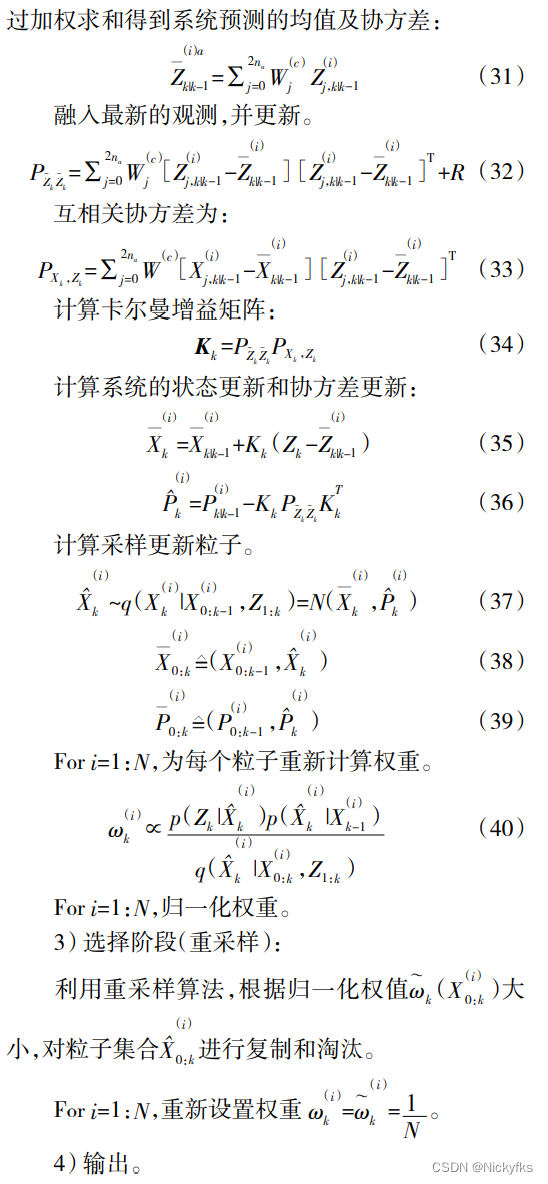
2.2 无迹粒子滤波算法流程
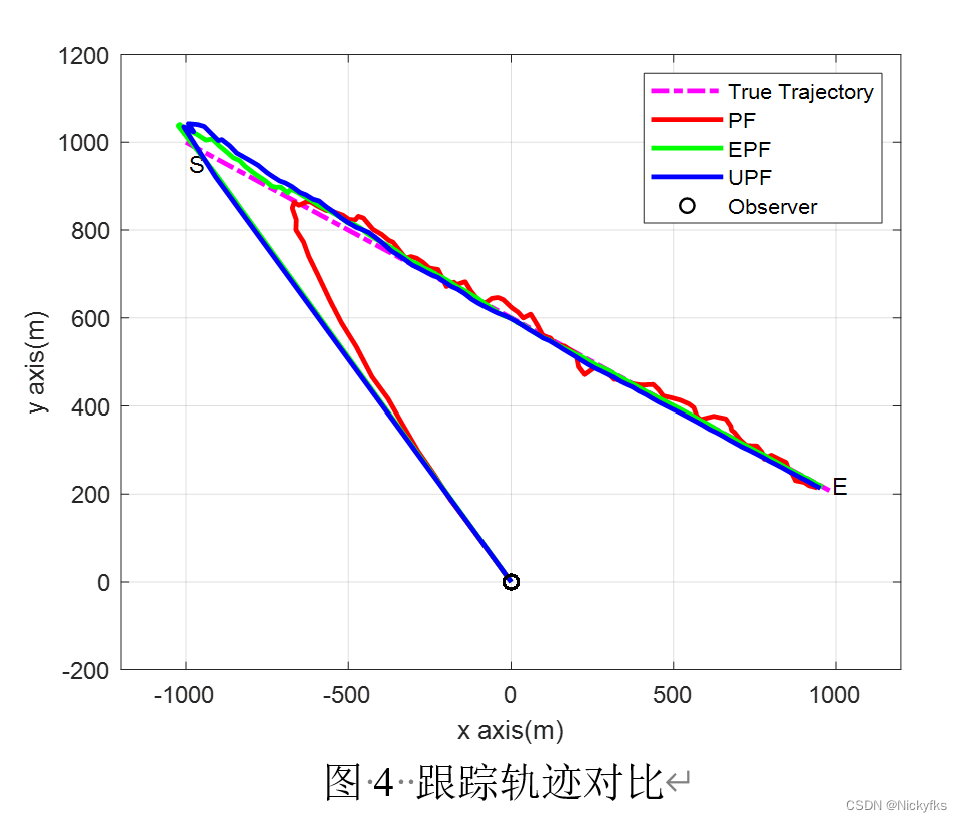
3.仿真分析
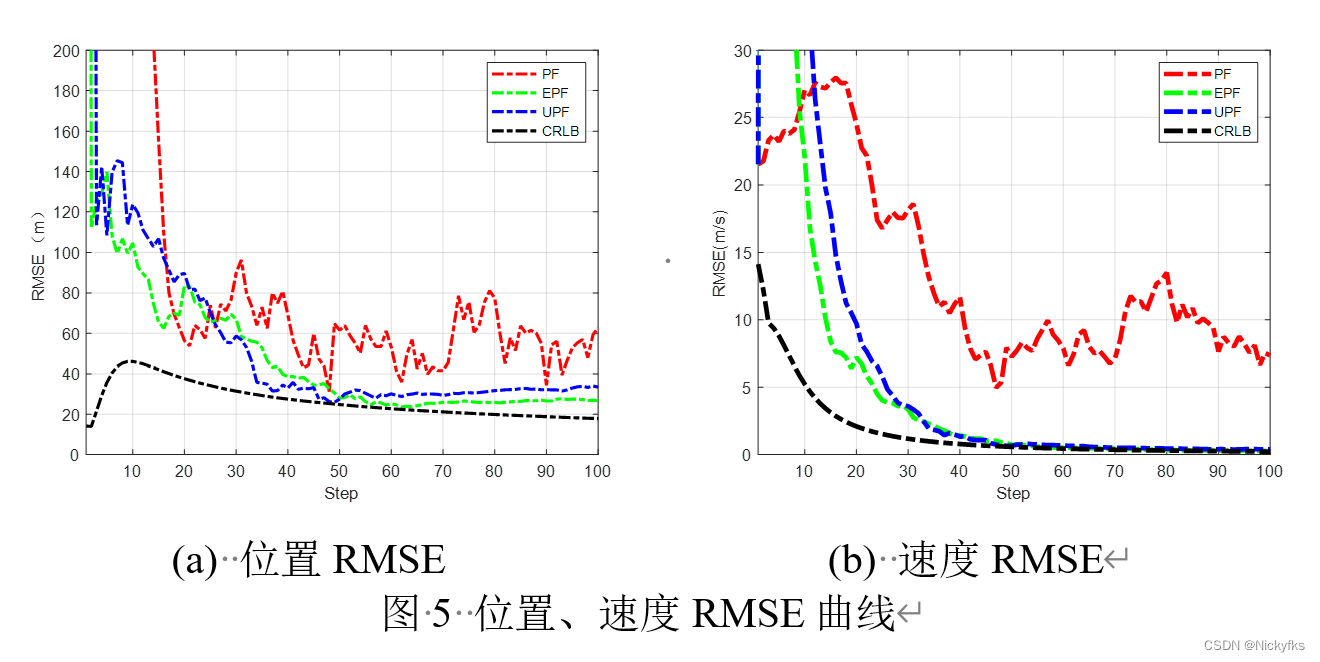
假设一目标在二维平面内做匀速直线运动,观测站处于原点且保持静止,无站址误差。观测站可以实时测量到目标与观测站之间的距离以及方位角(北偏东)。PF、EPF与UPF采用500个粒子,蒙特卡洛仿真10次,滤波状态初值状态为(0m,0m,0m/s,0m/s)。,并将RMSE与CRLB进行对比。
|
| 目标初始状态 | 量测误差 | 过程噪声 |
| 二维 | (-1000m,1000m,20m/s,-8m/s) | 100m,1° | 1e-4m/s2 |
4.参考文献
秦永元,张洪钺,汪叔华. 卡尔曼滤波与组合导航原理 [M]. 西北工业大学出版社, 2015.
张程振, 丁元明, 杨阳. 水下目标跟踪粒子滤波算法性能分析 [J]. 火力与指挥控制, 2022, 47(02): 18-24.

















 4万+
4万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











