






考虑以下单输入,单输出非线性系统:
反步法的设计思想是每一个子系统 中
为虚拟控制,通过适当的虚拟反馈
,使得系统的前面状态达到渐进稳定。但是系统的解一般不满足
,因此我们引入误差变量,期望通过控制作用,使得
与虚拟反馈
间具有某种渐进特性,从而实现整个系统的渐进稳定。
定义以下误差坐标变换(反步法的坐标变换)
代表虚拟控制器
反步法设计步骤如下(不断构造李雅普诺夫函数使系统稳定):
Step1:
定义李雅普诺夫函数为:
显而易见 >0, 对
求导得:
将 带入
得:
根据 坐标变换 可知,
为了使系统稳定,让
即:
显然,如果 = 0,(即:
),由
可知,
渐进稳定。但是一般情况
,此时我们再引入虚拟控制
使得误差
具有期望的渐进性态。为此,我们进行下一步设计
Step2:
定义李雅普诺夫函数为:
显而易见 >0, 对
求导得:
将 带入上式可得:
将带入上式可得:
为了使得<0,设计控制器如下:
其中m为正参数 将 带入
得:
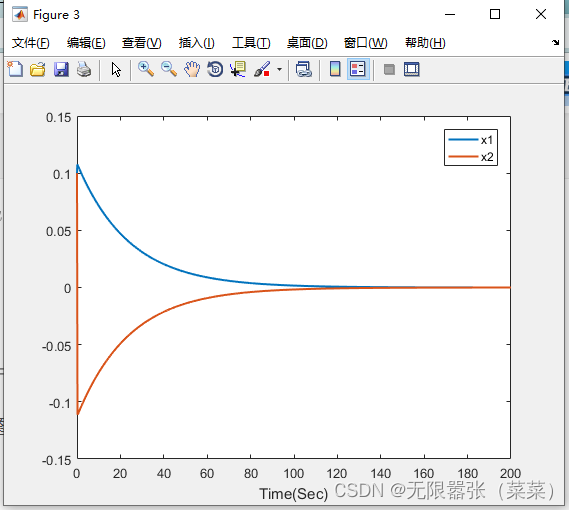
仿真验证:
设置初始值为:参数设置为:
和
趋于稳定如图所示:
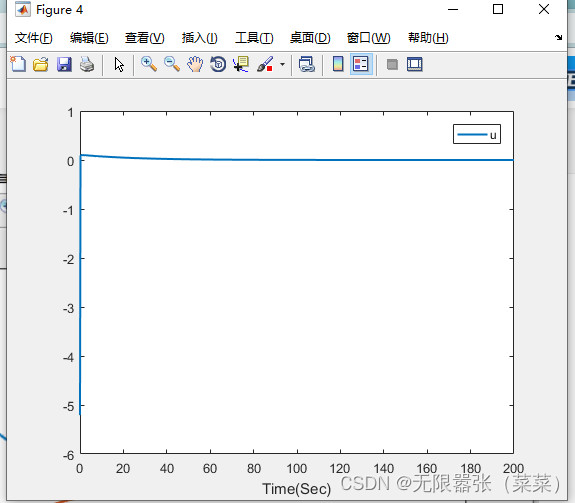
控制器如图所示:



















 2172
2172

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











