







[非线性控制理论]1_Lyapunov直接方法
[非线性控制理论]2_不变性原理
[非线性控制理论]3_基础反馈稳定控制器设计
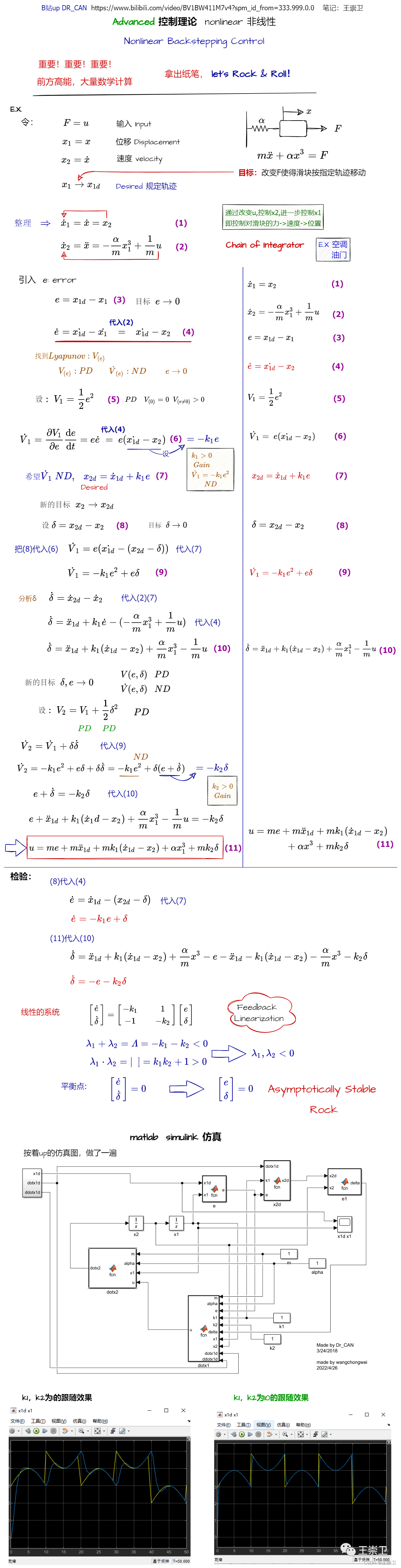
[非线性控制理论]4_反馈线性化_反步法
[非线性控制理论]5_自适应控制器(Adaptive controller)
[非线性控制理论]6_滑模控制
[非线性控制理论]7_High gain and High Frequency
[非线性控制理论]8_三种鲁棒控制器的比较
[非线性控制理论]9_非线性控制理论串讲
非线性控制的笔记就算完了,pdf已经上传网盘了,有需要的可以在公众号“王崇卫”回复“DR_CAN笔记”获取了。
反步设计法的基本思想是将复杂的非线性系统分解成不超过系统阶数的子系统,然后为每个子系统设计部分Lyapunov函数和中间虚拟控制量,一直“后退”到整个系统,将它们集成起来完成整个控制律的设计。
这节课笔记排版比较费时,公式相对比较多一点。
视频:https://www.bilibili.com/video/BV1BW411M7v4?spm_id_from=333.999.0.0
Feedback Linearization 反馈线性化
-
一个非线性的滑块,目标是为了改变F使得滑块按指定的轨迹移动。
-
链式系统(Chain of Integrator):通过改变u控制x2,进一步控制x1。即通过控制滑块的力->速度->位置。
-
分为两个步骤,构建中间输入,然后再构建真实输入u。
-
最后使用simulink做了下控制器的仿真。可以改变k1和k2看看轨迹跟踪的效果。


















 2105
2105

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









