







 本文介绍了如何通过CANoe进行ECU软件更新,利用OBD接口,通过CAN总线,采用CAPL编程。遵循ISO15765-3、ISO14229(UDS)和ISO15765-2标准,构建图形用户界面,并详细阐述了从应用层到物理层的数据传输过程。
本文介绍了如何通过CANoe进行ECU软件更新,利用OBD接口,通过CAN总线,采用CAPL编程。遵循ISO15765-3、ISO14229(UDS)和ISO15765-2标准,构建图形用户界面,并详细阐述了从应用层到物理层的数据传输过程。
目标:
车辆ECU需要更新软件,通过OBD口实现,通过CAN总线实现,编程语言是CAPL。
刷写流程基于ISO15765-3;应用层基于UDS(ISO14229)诊断协议;TP层基于ISO15765-2;数据链路层和物理层基于ISO11898
实现:
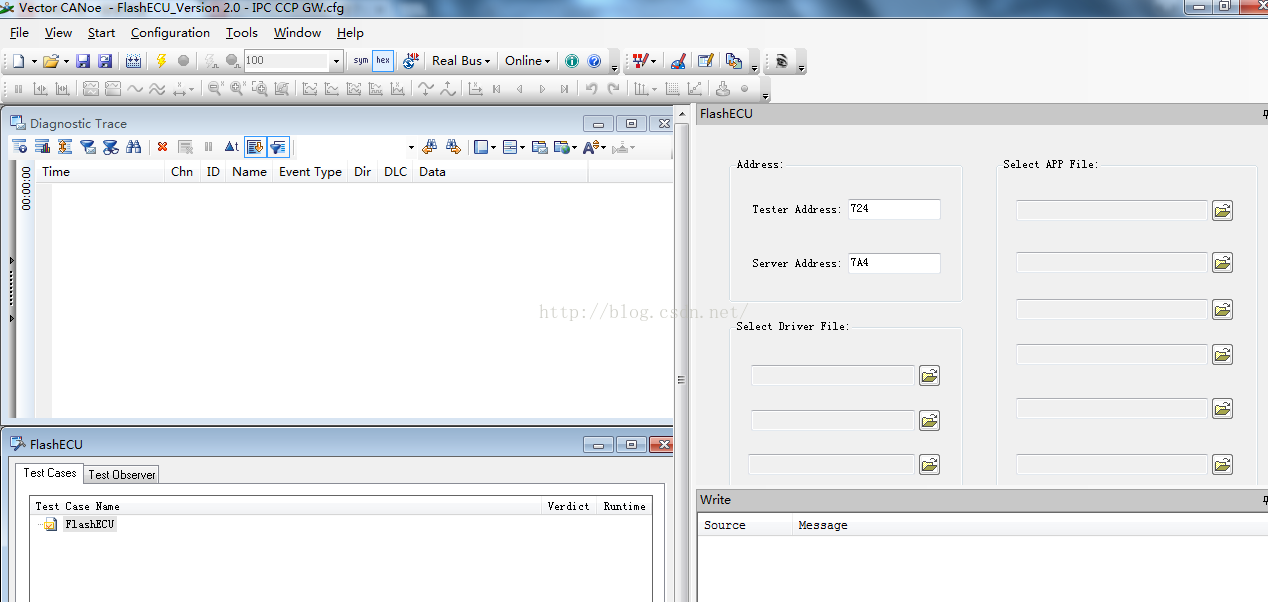
1.图形用户界面使用CANoe自带的panel来实现,用户可以选取刷写文件,ECU的地址等信息,这些信息通过环境变量被程序访问,环境变量在CANDB++中编辑生成。
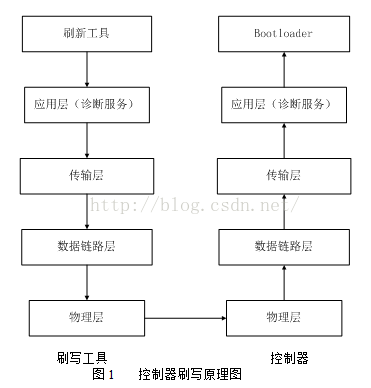
2.软件架构:
刷写工具解析s19 app,如果没有s19 app,那么可以使用HexView将HEX,BIN等app转成s19文件
依据ISO15765-3编写刷写流程代码,将app数据扔给应用层
应用层是基于UDS编写的,应用层在将数据扔给TP层
TP层将数据扔给数据链路层
数据链路层将数据扔给物理层,数据通过CAN总线被ECU接收
代码:
工作保密原因,只贴出UDS层的代码,秘钥也删了
includes{
}
variables{
char gECU[7]="Tester";
int useExtendedId=0; //use standard Id
long useFC=1; //use flow control
long bs=8; //block size of FC
long stmin=20; //set STmin to 10 ms
dword tester_address=0x7c1; //tester address
dword target_ecu_address=0x7c9; //BCM address
char wait_rsp_text_event[18]="response received"; //used to wait for response
const int BUFFER_SIZE_2048=0x2048;
const int BUFFER_SIZE_1024=0x1024;
const int LENGTH_4=4;
byte rxBuffer[BUFFER_SIZE_2048]; //receive buffer
long rxBufferLen=0; //receive buffer length
dword timeout=5000;
dword min_request_distance=50; //minum distance between two request
dword dist_request = 10;
char gDebugBuffer[255];
}
/*
read fault memory
*/
int read_fault_memory(byte _sub_func,byte _status_mask){
byte request[3]={0x19,0x02,0x09};
rxBufferLen=0;
request[1]=_sub_func;request[2]=_status_mask;
OSEKTL_DataReq(request,elcount(request) 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 2833
2833

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









