







 本文介绍了如何使用Arduino Leonardo单板与ADXL345三轴加速度传感器进行串口通信,实现读取原始数据并显示。包括硬件连接、编写测试代码及实际操作步骤。
本文介绍了如何使用Arduino Leonardo单板与ADXL345三轴加速度传感器进行串口通信,实现读取原始数据并显示。包括硬件连接、编写测试代码及实际操作步骤。
很早就听说Arduino,早就想玩了。最近搞了快Arduino板子,就是前面介绍的Arduino Leonardo,最近需要用到传感器,从三轴加速度ADXL345开始。
开发环境:
系统:XP
单板:Arduino Leonardo
平台:Arduino-1.5.2
目标:读三轴加速度ADXL345的原始数据,并通过串口显示
一、硬件介绍
ADXL345是一款小而薄的超低功耗3 轴加速度计,分辨率高(13位),测量范围达± 16g 。数字输出数据为16 位二进制补码格式,可通过SPI(3线或4线)或I2C数字接口访问。ADXL345非常适合移动设备应用。它可以在倾斜检测应用中测量静态重力加速度,还可以测量运动或冲击导致的动态加速度。其高分辨率(3.9mg/LSB),能够测量不到1.0° 的
倾斜角度变化。ADXL345模块原理图如下:
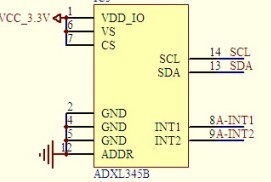
这里只用到SCL、SDA、VCC_3.3V、GND分别连接到Arduino的对应接口上。Arduino Leonardo上直接标有SDA、SCL连上即可,其它Arduino根据自己的板子连接。
二、编写测试代码
其实在Arduino上写代码非常简单,很多库都帮你做好了,直接调用即可,十分方便。但Arduino的版本很多,特别是Arduino-1.0以后,有些库有所改变,需要看对应版本的参考手册arduino-1.5.2-windows\arduino-1.5.2\reference下面有详细说明,我也是结合网上找的程序参考这些修改。代码如下
文件adx1345.ino
- #include <Wire.h>
- #define Register_ID 0
- #define Register_2D 0x2D
- #define Register_X0 0x32
- #define Register_X1 0x33
- #define Register_Y0 0x34
- #define Register_Y1 0x35
- #define Register_Z0 0x36
- #define Register_Z1 0x37
- int ADXAddress = 0xA7 >> 1; // the default 7-bit slave address
- int reading = 0;
- int val=0;
- int X0,X1,X_out;
- int Y0,Y1,Y_out;
- int Z1,Z0,Z_out;
- double Xg,Yg,Zg;
- void setup()
- {
- Wire.begin();
- Serial.begin(9600);
- delay(100);
- // enable to measute g data
- Wire.beginTransmission(ADXAddress);
- Wire.write(Register_2D);
- Wire.write(8); //measuring enable
- Wire.endTransmission(); // stop transmitting
- }
- void loop()
- {
- //--------------X
- Wire.beginTransmission(ADXAddress); // transmit to device
- Wire.write(Register_X0);
- Wire.write(Register_X1);
- Wire.endTransmission();
- Wire.requestFrom(ADXAddress,2);
- if(Wire.available()<=2)
- {
- X0 = Wire.read();
- X1 = Wire.read();
- X1=X1<<8;
- X_out=X0+X1;
- }
- //------------------Y
- Wire.beginTransmission(ADXAddress); // transmit to device
- Wire.write(Register_Y0);
- Wire.write(Register_Y1);
- Wire.endTransmission();
- Wire.requestFrom(ADXAddress,2);
- if(Wire.available()<=2)
- {
- Y0 = Wire.read();
- Y1 = Wire.read();
- Y1=Y1<<8;
- Y_out=Y0+Y1;
- }
- //------------------Z
- Wire.beginTransmission(ADXAddress); // transmit to device
- Wire.write(Register_Z0);
- Wire.write(Register_Z1);
- Wire.endTransmission();
- Wire.requestFrom(ADXAddress,2);
- if(Wire.available()<=2)
- {
- Z0 = Wire.read();
- Z1 = Wire.read();
- Z1=Z1<<8;
- Z_out=Z0+Z1;
- }
- /*
- //display the real value
- Xg=X_out/256.0;
- Yg=Y_out/256.0;
- Zg=Z_out/256.0;
- */
- //display the reading value
- Xg=X_out;
- Yg=Y_out;
- Zg=Z_out;
- Serial.print("X= ");
- Serial.print(Xg);
- Serial.print(" ");
- Serial.print("Y= ");
- Serial.print(Yg);
- Serial.print(" ");
- Serial.print("Z= ");
- Serial.print(Zg);
- Serial.println(" ");
- delay(200);
- }
需要对着手册操作,根据手册上介绍的寄存器设置、读写。寄存器FORMAT-OX31使用默认值0x0,设置加速度范围-2g~2g,根据手册
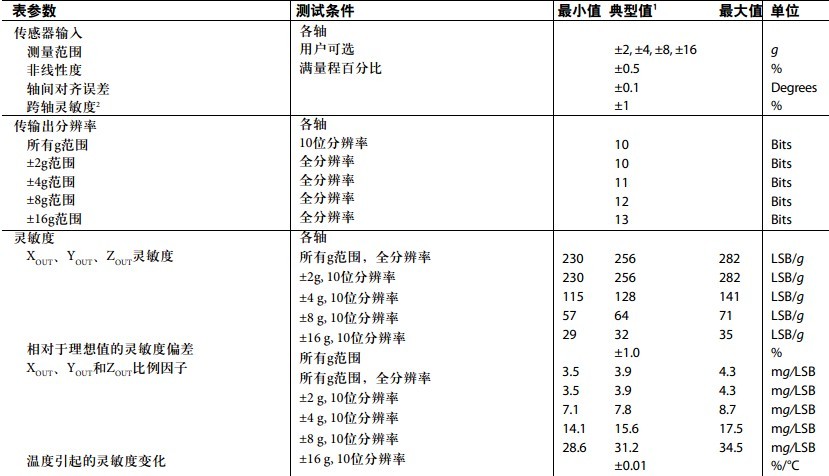
我们设置的采样范围-2g~2g,根据手册知道我们的加速度传感器采样值最大范围 -282~282,其中存在偏差。10位分辨率,采样范围-2g~2g,则1024/(2g-(-2g))=256LSB/g,也就是说理想值是256对应2g的加速度,呆会测试时水平放置时,读到垂直方向的值应该是128,对应重力加速度1g.开始测试,看是不是这样
3.编译、测试
Arduino还是很方便操作的,选择好单板、参考,直接点上面的“对勾”就开始编译,编译没问题,点“->”箭头状的,开始上传程序,直至上传进度条完成。
接着打开Tools/Serial Monitor 显示如下:
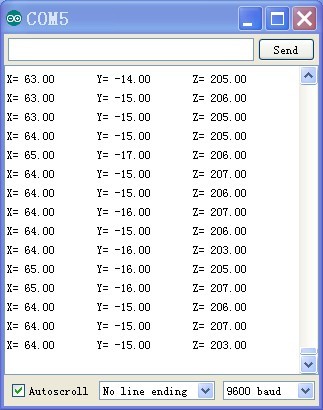
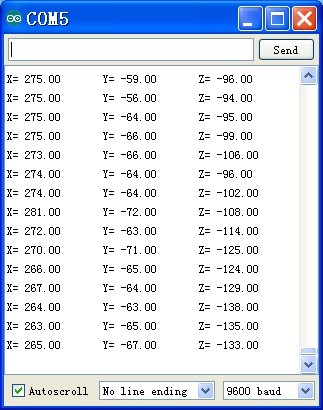
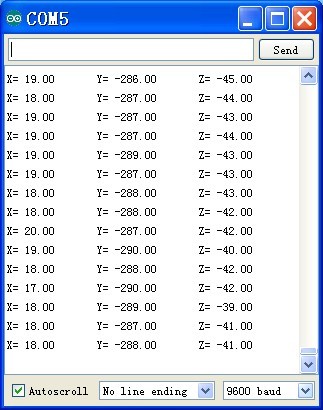
基本正常,但是这些数据还不能直接拿来用,还要进一步优化,以后会结合卡尔曼滤波等算法优化。

















 2100
2100

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









