




这一节我们首先介绍下计算机视觉领域中常见的三个坐标系:图像坐标系,相机坐标系,世界坐标系。以及他们之间的关系。然后介绍如何使用张正友相机标定法标定相机。
图像坐标系:
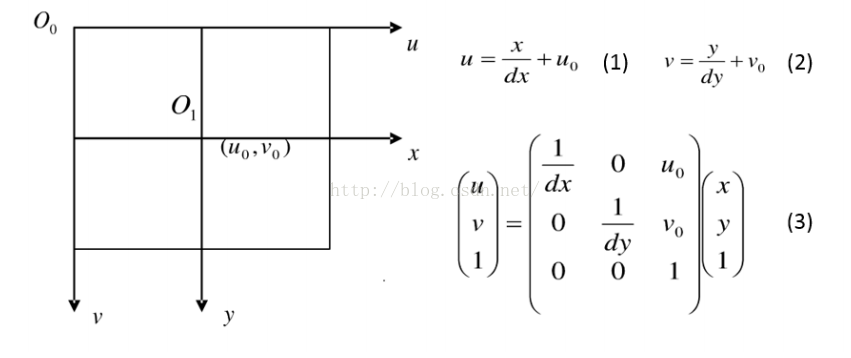
理想的图像坐标系原点O1和真实的O0有一定的偏差,由此我们建立了等式(1)和(2),可以用矩阵形式(3)表示。
相机坐标系(C)和世界坐标系(W):

通过相机与图像的投影关系,我们得到了等式(4)和等式(5),可以用矩阵形式(6)表示。我们又知道相机坐标系和世界坐标的关系可以用等式(7)表示:

由等式(3),等式(6)和等式(7)我们可以推导出图像坐标系和世界坐标系的关系:

其中M1称为相机的内参矩阵,包含内参(fx,fy,u0,v0)。M2称为相机的外参矩阵,包含外参(R:旋转矩阵,T:平移矩阵)。
众所周知,相机镜头存在一些畸变,主要是径向畸变(下图dr),也包括切向畸变(下图dt)等。

上图右侧等式中,k1,k2,k3,k4,k5,k6为径向畸变,p1,p2为切向畸变。在OpenCV中我们使用张正友相机标定法通过10幅不同角度的棋盘图像来标定相机获得相机内参和畸变系数。函数为calibrateCamera(objectPoints, imagePoints, imageSize, cameraMatrix, distCoeffs, rvecs, tvecs,flag)
objectPoints: 一组世界坐标系中的3D
imagePoints: 超过10张图
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 4114
4114













 到【灌水乐园】发言
到【灌水乐园】发言







