







1.倾斜角测量原理
对于轴加速度传感器,当它的传感方向和重力加速度方向一致时,假如此时为零倾斜角度,设加速度传感器测量结果为F(θ),θ为倾斜角度,g为重力加速度,如图1所示。
所以当倾斜角θ太小时,测量的分辨率就会太小,当角度足够大时精度才会上升。所以对一轴倾斜角传感器的运用是:把它的传感方向与重力加速度方向垂直时的状态设为零倾斜角度,文献运用此方法测量倾斜角,如图2所示,此时:
此时倾斜角度小时测量精度高,而对于一轴加速度传感器而言,只能测一个方向的倾斜角。所以用一个两轴加速度传感器,两个传感方向皆垂直于重力加速度,当两轴倾斜角倾斜时,加速度传感器测量结果为:

如何利用θx,θy求出倾斜角θ。首先定义两组三轴向量:[x,y,z]为参考O倾斜向量,[u,v,r]为倾斜后的向量。如图3所示,设向量[z,y,z]先绕y轴倾斜,再绕x轴倾斜,所以从[x,y,z]到[u,v,r]的转换为:
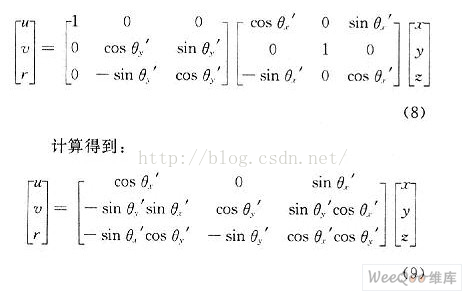
设x,y为水平方向,z为垂直方向。(x,y,z)=(0,0,1)于是便有:
此时u=kF(θx)=kgsinθx,v=kF(θy)=kgsinθy,所以:

而传感器实际倾斜角为:
所以只要得出两轴加速度传感器测量结果F(θx)和F(θy)就可以计算出θx和θy,进而知道总的倾斜度。
测量一个全方位,全摆幅的倾斜角就必须使用三轴加速度计。
运用三轴加速度计测量倾斜角就必须把测量范围分为两档,一档为倾斜角为-π/4~π/4,二档为倾斜角为(-π/2~-π/4)&(π/4~π/2)。当倾斜角度在±π/4之间时,

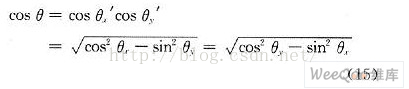
这里以F(θz)的值作为划分档次的依据。在一档中F(θx),F(θy)的分辨率很高,此时相当于运用一个两轴加速度传感器测量全方位,低摆幅倾斜角,运用式(15)可以计算倾斜角。在二档中F(θz)的分辨率都很高,此时相当于运用一个一轴加速度传感器测量全方位,高倾斜角度的倾斜角,运用式(1)可以计算倾斜角。
2.零点偏移
零刻度偏移的解决方案,当倾斜角较小时,z轴数据的分辨率极低,影响测量精度,所以此时运用其中两轴进行倾斜角测量将更精确。为提高精度,需要对倾斜角传感器进行调零校正,校正后的结果将是测量值减去偏移值后的数据。偏移值的测量方法:
将传感器放置在一个校准水平面上,此时的输出即为偏移值。
接下来就是用代码实现该算法(注意根号不能有负数):
float calculateTilt(float ax,float ay,float az,char flag_x,char flag_y,char flag_z)
{
float g=9.80665;
float temp;
float Tiltangle=0;
temp=((sqrt(2)/2)*g/10);
if(az>((sqrt(2)/2)*g/10))
{
Tiltangle=(1-ay*ay)-(1-ax*ax);
if(Tiltangle<0)
Tiltangle=-Tiltangle;
Tiltangle=acos(sqrt(Tiltangle));
Tiltangle=Tiltangle/PI*180;
if(flag_x==1||flag_y==1)
{
Tiltangle+=90;
}
else
{
Tiltangle=90-Tiltangle;
}
}
else
{
Tiltangle=asin(az);
Tiltangle=Tiltangle/PI*180;
if(flag_z==1)
{
Tiltangle+=90;
}
else
{
Tiltangle=90-Tiltangle;
}
}
return Tiltangle;
}
对于轴加速度传感器,当它的传感方向和重力加速度方向一致时,假如此时为零倾斜角度,设加速度传感器测量结果为F(θ),θ为倾斜角度,g为重力加速度,如图1所示。
所以当倾斜角θ太小时,测量的分辨率就会太小,当角度足够大时精度才会上升。所以对一轴倾斜角传感器的运用是:把它的传感方向与重力加速度方向垂直时的状态设为零倾斜角度,文献运用此方法测量倾斜角,如图2所示,此时:
此时倾斜角度小时测量精度高,而对于一轴加速度传感器而言,只能测一个方向的倾斜角。所以用一个两轴加速度传感器,两个传感方向皆垂直于重力加速度,当两轴倾斜角倾斜时,加速度传感器测量结果为:
如何利用θx,θy求出倾斜角θ。首先定义两组三轴向量:[x,y,z]为参考O倾斜向量,[u,v,r]为倾斜后的向量。如图3所示,设向量[z,y,z]先绕y轴倾斜,再绕x轴倾斜,所以从[x,y,z]到[u,v,r]的转换为:
设x,y为水平方向,z为垂直方向。(x,y,z)=(0,0,1)于是便有:


此时u=kF(θx)=kgsinθx,v=kF(θy)=kgsinθy,所以:
而传感器实际倾斜角为:
所以只要得出两轴加速度传感器测量结果F(θx)和F(θy)就可以计算出θx和θy,进而知道总的倾斜度。
测量一个全方位,全摆幅的倾斜角就必须使用三轴加速度计。
运用三轴加速度计测量倾斜角就必须把测量范围分为两档,一档为倾斜角为-π/4~π/4,二档为倾斜角为(-π/2~-π/4)&(π/4~π/2)。当倾斜角度在±π/4之间时,
这里以F(θz)的值作为划分档次的依据。在一档中F(θx),F(θy)的分辨率很高,此时相当于运用一个两轴加速度传感器测量全方位,低摆幅倾斜角,运用式(15)可以计算倾斜角。在二档中F(θz)的分辨率都很高,此时相当于运用一个一轴加速度传感器测量全方位,高倾斜角度的倾斜角,运用式(1)可以计算倾斜角。
2.零点偏移
零刻度偏移的解决方案,当倾斜角较小时,z轴数据的分辨率极低,影响测量精度,所以此时运用其中两轴进行倾斜角测量将更精确。为提高精度,需要对倾斜角传感器进行调零校正,校正后的结果将是测量值减去偏移值后的数据。偏移值的测量方法:
将传感器放置在一个校准水平面上,此时的输出即为偏移值。
接下来就是用代码实现该算法(注意根号不能有负数):
float calculateTilt(float ax,float ay,float az,char flag_x,char flag_y,char flag_z)
{
float g=9.80665;
float temp;
float Tiltangle=0;
temp=((sqrt(2)/2)*g/10);
if(az>((sqrt(2)/2)*g/10))
{
Tiltangle=(1-ay*ay)-(1-ax*ax);
if(Tiltangle<0)
Tiltangle=-Tiltangle;
Tiltangle=acos(sqrt(Tiltangle));
Tiltangle=Tiltangle/PI*180;
if(flag_x==1||flag_y==1)
{
Tiltangle+=90;
}
else
{
Tiltangle=90-Tiltangle;
}
}
else
{
Tiltangle=asin(az);
Tiltangle=Tiltangle/PI*180;
if(flag_z==1)
{
Tiltangle+=90;
}
else
{
Tiltangle=90-Tiltangle;
}
}
return Tiltangle;
}














 678
678











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









