







版权声明:本文为博主原创文章,未经博主允许不得转载。
第九章 PX4-pixhawk-姿态估计解析
这一章节我们对姿态估计进行解析,这一章节涉及到算法,主要涉及到的还是DCM(方向余弦)算法。首先我们还从启动文件开始进行讲解。
我们找到rc.mc_apps中,我们可以找到SYS_MC_EST_GROUP的参数为0,所以我们对attitude_estimator_q.cpp进行讲解 
回到attitude_estimator_q.cpp文件中,这里提一下这个文件应该知道是怎么编译的吧,在cmake文件中找到的。找到入口函数attitude_estimator_q_main中。我们可以知道参数只有start,这个怎么解析的不用说了吧,前几章节都说到过了。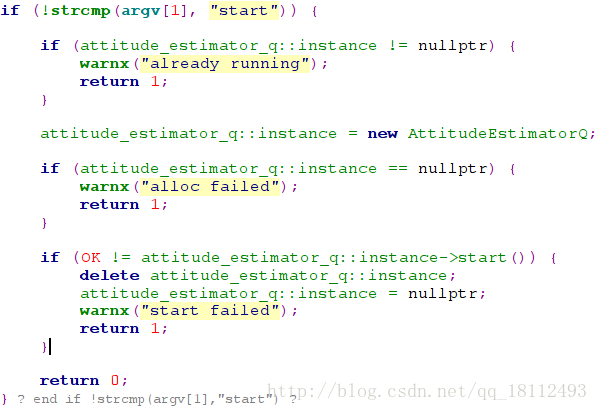
这里面没有什么好说的,new这个就不用说了吧,我们找到start函数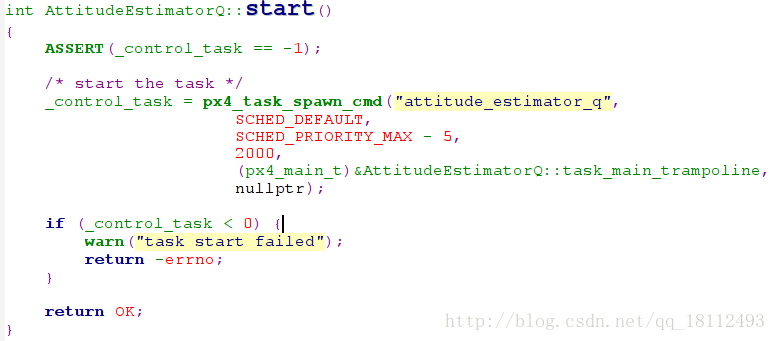

首先还是先订阅相关数据,包括传感器、视觉、空速计、参数、定位信息并且更新参数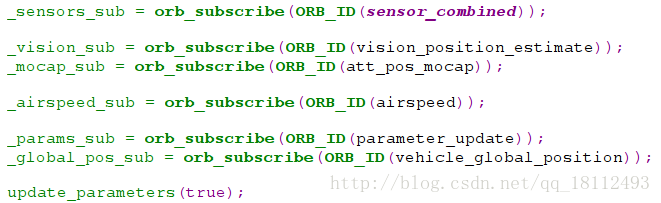
接着到wihile中,首先还是poll函数来防止阻塞,这个用法直接去度一下poll就有说明。首先进行参数更新检测 





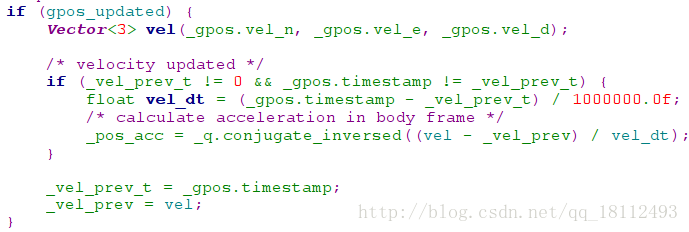
然后就是进入到最重要的函数update,这个函数就涉及到姿态解算了。我们进入到这个函数中
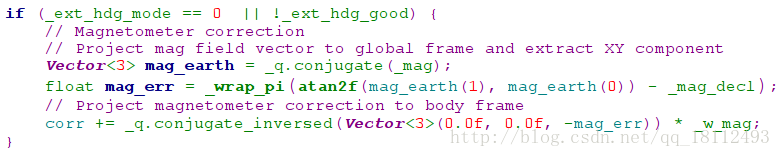
首先要做的是加速率的偏移调整,这里我们不用视觉和动作捕捉,所以不对它们进行讲解,这些主要是对航向角进行修正。接下来是利用电子罗盘数据进行航向修正,这里的到的修正量是yaw。
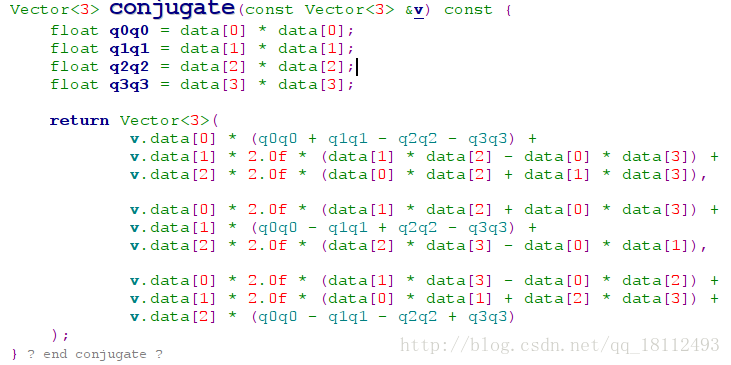
这里讲一下_q.conjugate函数这里是坐标系的转换也就是b系转R系也就是机体坐标系转大地坐标系,这里的_q是四元素,首先我们看看这个系的转换公式(四元素法) 

然后进行四元素的归一化处理,这个normalize函数不难理解吧,平方求根后作商。接着利用accl进行陀螺仪数据修正这个貌似不难,跟inint立面差不多。然后进行PI调节 这个理论性很强哦。主要是利用PI调节对姿态进行估计
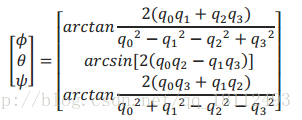
我们回到att_estimator_q_main中,接着就是利用四元素转换为欧拉角。

http://blog.csdn.net/qq_18112493/article/details/73822871














 2187
2187











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









