








本文主要内容参考自ROS wiki:Writing a tf listener (C++),在加入了自己的一些理解的同时,我也对原文进行了适当的修改。原文使用Creative Commons Attribution 3.0,本文使用知识共享署名-非商业性使用-相同方式共享 4.0 国际许可协议协议,若使用本文,请自觉遵守相关协议。
上一个教程中,我们创建了一个tf广播器来发布乌龟的位姿信息,这篇文章我们来学习下如何创建tf监听器。该节点的主要任务是监听tf中turtle2到turtle1转换,然后将转换信息转化为速度信息发送给turtle2。
使用到的库
ros基础库(ros/ros.h)就不用提了,必须要添加进来;其次就是tf中的transform_listener.h,这里也不多做说明。由于我们需要将监听到的消息转换为速度消息,因此我们需要geometry_msgs/Twist消息的头文件;另外,我们需要在同一窗口中再生成一个乌龟turtle2,而turtlesim功能包中spawn服务提供了此项功能,因此我们需要spawn服务的头文件。
note:和消息类似,关于服务的创建过程也可以在ROS基础教程中找到:Creating a ROS msg and srv。另外,在ROS初级教程中,我们也曾使用过spawn服务,只不过是使用相应的命令和参数,具体可以参考:Understanding ROS Services and Parameters当然,如果你希望了解spawn(再生)服务的详细信息的话,你可以参考这里:Spawn.h。
调用spawn服务
ros中的基础工作(如初始化、创建节点句柄等),我们就不介绍了。下面介绍下如何调用spawn服务,建议如果有不懂的地方可以查看ros的基础教程:Writing a Simple Service and Client (C++)。
首先等待spawn服务,直到它启动起来;然后创建spawn服务的客户端,以及spawn服务。
ros::service::waitForService("spawn");
ros::ServiceClient add_turtle =
node.serviceClient<turtlesim::Spawn>("spawn");
turtlesim::Spawn srv;然后使用客户端调用服务即可:
add_turtle.call(srv);
创建消息发布器
使用下面的命令即可创建消息发布器,这里我们设置消息的类型为geometry_msgs::Twist,发布主题为"turtle2/cmd_vel",缓冲区的大小设置为10;
ros::Publisher turtle_vel =
node.advertise<geometry_msgs::Twist>("turtle2/cmd_vel", 10);监听tf
首先,我们需要创建一个监听器用于监听是否存在需要的tf:
tf::TransformListener listener;然后,我们使用一个循环,在循环中,我们主要完成以下工作:
- 监听器查找特定的tf
- 根据查找的tf信息计算相应的速度信息
- 将速度信息发布给turtle2
// 发布频率为10Hz
ros::Rate rate(10.0);
while (node.ok()){
tf::StampedTransform transform;
try{
// 查找特定的tf
listener.lookupTransform("/turtle2", "/turtle1",
ros::Time(0), transform);
}
catch (tf::TransformException &ex) {
ROS_ERROR("%s",ex.what());
ros::Duration(1.0).sleep();
continue;
}
// 根据tf计算速度信息
geometry_msgs::Twist vel_msg;
vel_msg.angular.z = 4.0 * atan2(transform.getOrigin().y(),
transform.getOrigin().x());
vel_msg.linear.x = 0.5 * sqrt(pow(transform.getOrigin().x(), 2) +
pow(transform.getOrigin().y(), 2));
// 发布速度信息给turtle2
turtle_vel.publish(vel_msg);
rate.sleep();
}其中,lookupTransform函数,我们需要详细说明一下。前两个参数是指定从arg1到arg2的tf的,我们这里查找的是从turtle2到turtle1的转换;第三个参数是指定tf的时间的,我们这里使用的是ros::Time(0),这样的话,我们可以获取到最近存在的tf;最后一个参数用来保存查找到的tf。
编译
打开learning_tf功能包下的CMakeList.txt文件,然后在其中添加一下代码:
add_executable(turtle_tf_listener src/turtle_tf_listener.cpp)
target_link_libraries(turtle_tf_listener ${catkin_LIBRARIES})然后,进入你的工作空间编译即可:
cd %YOUR_CATKIN_WORKSPACE_HOME%/
catkin_make运行
我们仅仅需要在上一篇文章中的launch文件中添加两行代码即可:
<launch>
...
<node pkg="learning_tf" type="turtle_tf_broadcaster"
args="/turtle2" name="turtle2_tf_broadcaster" />
<node pkg="learning_tf" type="turtle_tf_listener"
name="listener" />
</launch>这里我们利用了上一篇博客中的发布转换信息的节点——turtle_tf_broadcaster,用它我们可以将turtle2的转换也发布出来。只有这样,本文中的节点才能顺利找到turtle1到turtle2的转换。
然后启动launch文件即可:
roslaunch learning_tf start_demo.launch查看结果
使用方向键控制第一个乌龟,你会发现后面的乌龟始终跟着前一个乌龟。
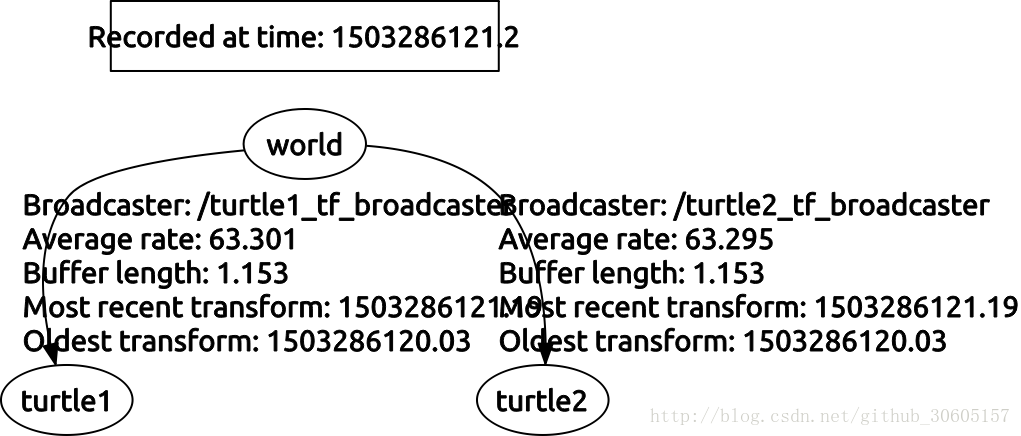
还是和上一篇文章类似,我们使用同样的工具来查看tf转换,首先是tf_echo:
rosrun tf tf_echo /turtle2 /turtle1当然,为了力求直观,我们可以使用rviz来查看tf转换的信息,具体步骤请查看前面的文章。
到这里,我们已经基本实现了前面介绍的Demo,不过这个Demo还不完善,后面我们会继续完善这个Demo。
参考资料
- ROS wiki:Writing a tf listener (C++)
- ROS机器人程序设计,机械工业出版社

本作品采用知识共享署名-非商业性使用-相同方式共享 4.0 国际许可协议进行许可。















 1642
1642

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









