







本次是对Levenberg–Marquardt的学习总结,是为之后看懂sparse bundle ajdustment打基础。这篇笔记包含如下内容:
- 回顾高斯牛顿算法,引入LM算法
- 惩罚因子的计算(迭代步子的计算)
- 完整的算法流程及代码样例
1. 回顾高斯牛顿,引入LM算法
根据之前的博文: Gauss-Newton算法学习
r(x)为某个问题的残差residual,是关于x的非线性函数。我们知道高斯牛顿法的迭代公式:
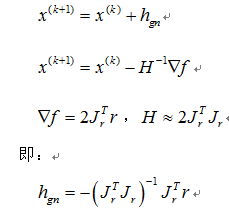
Levenberg–Marquardt算法是对高斯牛顿的改进,在迭代步长上略有不同:
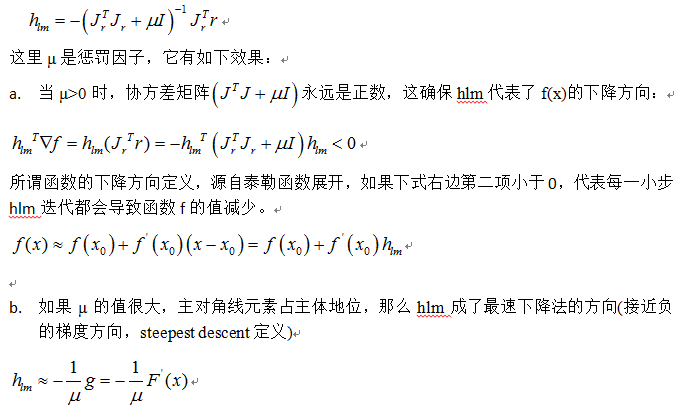
最速下降法对初始点没有特别要求具有整体收敛性,但是相邻两次的搜索方向是相互垂直的,所以收敛并不一定快。总而言之就是:当目标函数的等值线接近于圆(球)时,下降较快;等值线类似于扁长的椭球时,一开始快,后来很慢。This is good if the current iterate is far from the solution.
c. 如果μ的值很小,那么hlm成了高斯牛顿法的方向(适合迭代的最后阶段,非常接近最优解,避免了最速下降的震荡)

由此可见,惩罚因子既下降的方向又影响下降步子的大小。
2. 惩罚因子的计算[迭代步长计算]
我们的目标是求f的最小值,我们希望迭代开始时,惩罚因子μ被设定为较小的值,若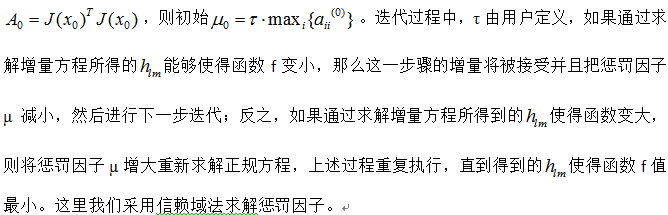
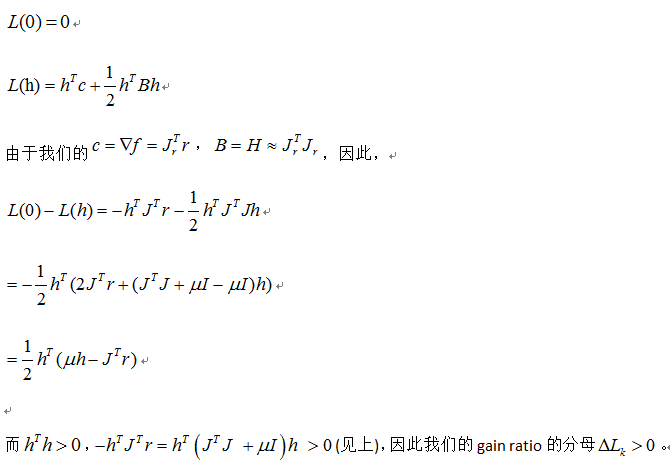
信赖域方法与线搜索技术一样,也是优化算法中的一种保证全局收敛的重要技术. 它们的功能都是在优化算法中求出每次迭代的位移, 从而确定新的迭代点.所不同的是: 线搜索技术是先产生位移方向(亦称为搜索方向), 然后确定位移的长度(亦称为搜索步长)。而信赖域技术则是直接确定位移, 产生新的迭代点。
信赖域方法的基本思想是:首先给定一个所谓的“信赖域半径”作为位移长度的上界,并以当前迭代点为中心以此“上界”为半径确定一个称之为“信赖域”的闭球区域。然后,通过求解这个区域内的“信赖域子问题”(目标函数的二次近似模型) 的最优点来确定“候选位移”。若候选位移能使目标函数值有充分的下降量, 则接受该候选位移作为新的位移,并保持或扩大信赖域半径, 继续新的迭代。否则, 说明二次模型与目标函数的近似度不够理想,需要缩小信赖域半径,再通过求解新的信赖域内的子问题得到新的候选位移。如此重复下去,直到满足迭代终止条件。
现在用信赖域方法解决之前的无约束线性规划: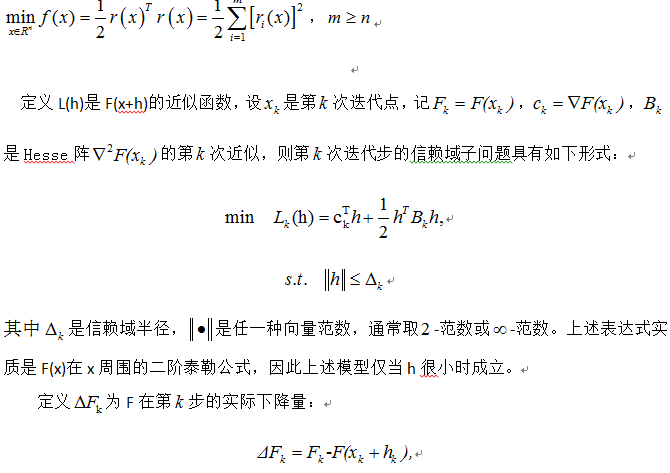
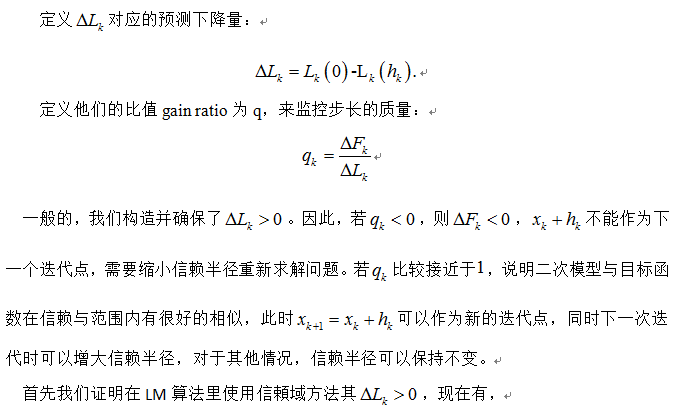
如果q很大,说明L(h)非常接近F(x+h),我们可以减少惩罚因子μ,以便于下次迭代此时算法更接近高斯牛顿算法。如果q很小或者是负的,说明是poor approximation,我们需要增大惩罚因子,减少步长,此时算法更接近最速下降法。具体来说,
a.当q大于0时,此次迭代有效:
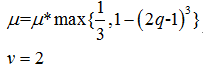
b.当q小于等于0时,此次迭代无效:

3.完整的算法流程及代码距离
LM的算法流程和高斯牛顿几乎一样,只是迭代步长求法利用信赖域法
(1)给定初始点x(0),允许误差ε>0,置k=0
(2)当f(xk+1)-f(xk)小于阈值ε时,算法退出,否则(3)
(3)xk+1=xk+hlm,代入f,返回(1)
两个例子还是沿用之前的。
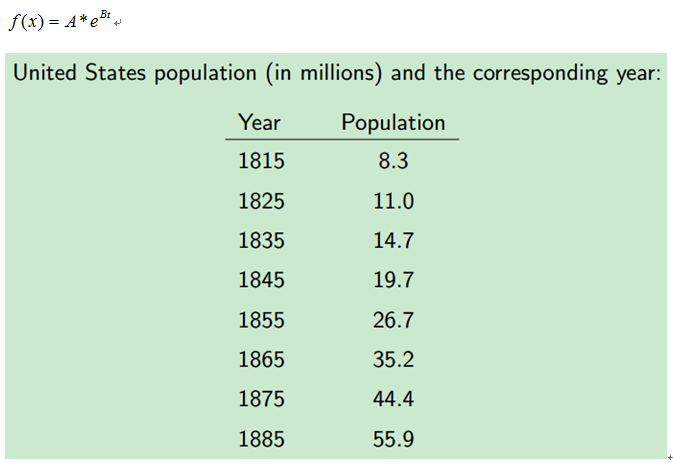
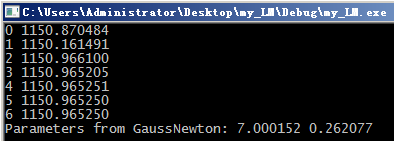
例子1,根据美国1815年至1885年数据,估计人口模型中的参数A和B。如下表所示,已知年份和人口总量,及人口模型方程,求方程中的参数。
// A simple demo of Gauss-Newton algorithm on a user defined function
#include <cstdio>
#include <vector>
#include <opencv2/core/core.hpp>
using namespace std;
using namespace cv;
const double DERIV_STEP = 1e-5;
const int MAX_ITER = 100;
void LM(double(*Func)(const Mat &input, const Mat ¶ms), // function pointer
const Mat &inputs, const Mat &outputs, Mat ¶ms);
double Deriv(double(*Func)(const Mat &input, const Mat ¶ms), // function pointer
const Mat &input, const Mat ¶ms, int n);
// The user defines their function here
double Func(const Mat &input, const Mat ¶ms);
int main()
{
// For this demo we're going to try and fit to the function
// F = A*exp(t*B)
// There are 2 parameters: A B
int num_params = 2;
// Generate random data using these parameters
int total_data = 8;
Mat inputs(total_data, 1, CV_64F);
Mat outputs(total_data, 1, CV_64F);
//load observation data
for(int i=0; i < total_data; i++) {
inputs.at<double>(i,0) = i+1; //load year
}
//load America population
outputs.at<double>(0,0)= 8.3;
outputs.at<double>(1,0)= 11.0;
outputs.at<double>(2,0)= 14.7;
outputs.at<double>(3,0)= 19.7;
outputs.at<double>(4,0)= 26.7;
outputs.at<double>(5,0)= 35.2;
outputs.at<double>(6,0)= 44.4;
outputs.at<double>(7,0)= 55.9;
// Guess the parameters, it should be close to the true value, else it can fail for very sensitive functions!
Mat params(num_params, 1, CV_64F);
//init guess
params.at<double>(0,0) = 6;
params.at<double>(1,0) = 0.3;
LM(Func, inputs, outputs, params);
printf("Parameters from GaussNewton: %lf %lf\n", params.at<double>(0,0), params.at<double>(1,0));
return 0;
}
double Func(const Mat &input, const Mat ¶ms)
{
// Assumes input is a single row matrix
// Assumes params is a column matrix
double A = params.at<double>(0,0);
double B = params.at<double>(1,0);
double x = input.at<double>(0,0);
return A*exp(x*B);
}
//calc the n-th params' partial derivation , the params are our final target
double Deriv(double(*Func)(const Mat &input, const Mat ¶ms), const Mat &input, const Mat ¶ms, int n)
{
// Assumes input is a single row matrix
// Returns the derivative of the nth parameter
Mat params1 = params.clone();
Mat params2 = params.clone();
// Use central difference to get derivative
params1.at<double>(n,0) -= DERIV_STEP;
params2.at<double>(n,0) += DERIV_STEP;
double p1 = Func(input, params1);
double p2 = Func(input, params2);
double d = (p2 - p1) / (2*DERIV_STEP);
return d;
}
void LM(double(*Func)(const Mat &input, const Mat ¶ms),
const Mat &inputs, const Mat &outputs, Mat ¶ms)
{
int m = inputs.rows;
int n = inputs.cols;
int num_params = params.rows;
Mat r(m, 1, CV_64F); // residual matrix
Mat r_tmp(m, 1, CV_64F);
Mat Jf(m, num_params, CV_64F); // Jacobian of Func()
Mat input(1, n, CV_64F); // single row input
Mat params_tmp = params.clone();
double last_mse = 0;
float u = 1, v = 2;
Mat I = Mat::ones(num_params, num_params, CV_64F);//construct identity matrix
int i =0;
for(i=0; i < MAX_ITER; i++) {
double mse = 0;
double mse_temp = 0;
for(int j=0; j < m; j++) {
for(int k=0; k < n; k++) {//copy Independent variable vector, the year
input.at<double>(0,k) = inputs.at<double>(j,k);
}
r.at<double>(j,0) = outputs.at<double>(j,0) - Func(input, params);//diff between previous estimate and observation population
mse += r.at<double>(j,0)*r.at<double>(j,0);
for(int k=0; k < num_params; k++) {
Jf.at<double>(j,k) = Deriv(Func, input, params, k); //construct jacobian matrix
}
}
mse /= m;
params_tmp = params.clone();
Mat hlm = (Jf.t()*Jf + u*I).inv()*Jf.t()*r;
params_tmp += hlm;
for(int j=0; j < m; j++) {
r_tmp.at<double>(j,0) = outputs.at<double>(j,0) - Func(input, params_tmp);//diff between current estimate and observation population
mse_temp += r_tmp.at<double>(j,0)*r_tmp.at<double>(j,0);
}
mse_temp /= m;
Mat q(1,1,CV_64F);
q = (mse - mse_temp)/(0.5*hlm.t()*(u*hlm-Jf.t()*r));
double q_value = q.at<double>(0,0);
if(q_value>0)
{
double s = 1.0/3.0;
v = 2;
mse = mse_temp;
params = params_tmp;
double temp = 1 - pow(2*q_value-1,3);
if(s>temp)
{
u = u * s;
}else
{
u = u * temp;
}
}else
{
u = u*v;
v = 2*v;
params = params_tmp;
}
// The difference in mse is very small, so quit
if(fabs(mse - last_mse) < 1e-8) {
break;
}
//printf("%d: mse=%f\n", i, mse);
printf("%d %lf\n", i, mse);
last_mse = mse;
}
}
clc;
clear;
a0=[6,6];
options=optimset('Algorithm','Levenberg-Marquardt','Display','iter');
data_1=[1 2 3 4 5 6 7 8];
obs_1=[8.3 11.0 14.7 19.7 26.7 35.2 44.4 55.9];
a=lsqnonlin(@myfun,a0,[],[],options,data_1,obs_1);
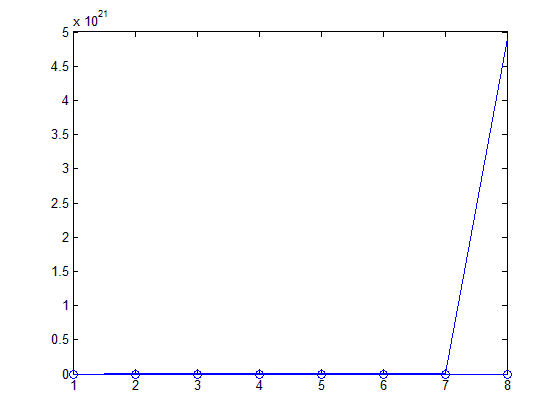
plot(data_1,obs_1,'o');
hold on
plot(data_1,a(1)*exp(a(2)*data_1),'b');
plot(data_1,7*exp(a(2)*data_1),'b');
%hold off
a(1)
a(2)
function E = myfun(a, x,y)
%这是一个测试文件用于测试 lsqnonlin
% Detailed explanation goes here
x=x(:);
y=y(:);
Y=a(1)*exp(a(2)*x);
E=y-Y;
end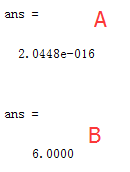
最后一个点拟合失败的,所以函数不对的
因此虽然莱文博格-马夸特迭代法能够自适应的在高斯牛顿和最速下降法之间调整,既可保证在收敛较慢时迭代过程总是下降的,又可保证迭代过程在解的邻域内迅速收敛。但是,LM对于初始点选择还是比较敏感的!
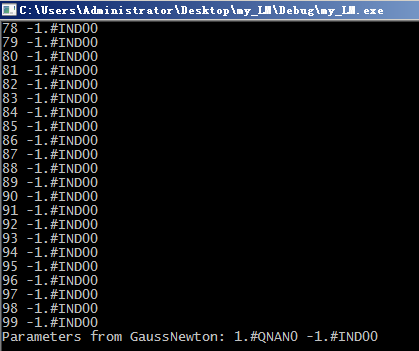
例子2:我想要拟合如下模型,

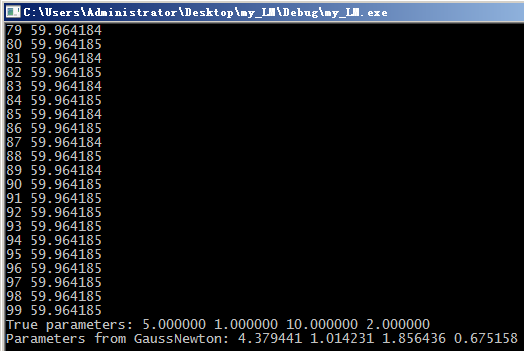
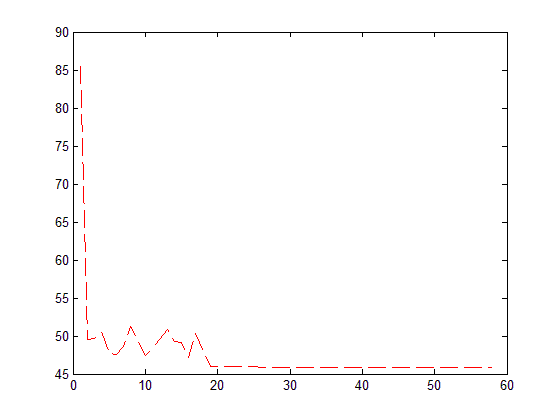
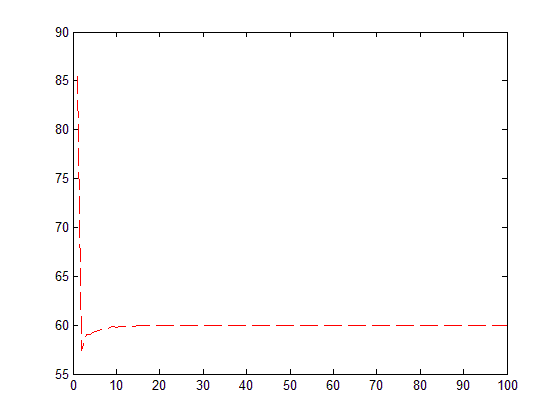
由于缺乏观测量,就自导自演,假设4个参数已知A=5,B=1,C=10,D=2,构造100个随机数作为x的观测值,计算相应的函数观测值。然后,利用这些观测值,反推4个参数。
// A simple demo of Gauss-Newton algorithm on a user defined function
#include <cstdio>
#include <vector>
#include <opencv2/core/core.hpp>
using namespace std;
using namespace cv;
const double DERIV_STEP = 1e-5;
const int MAX_ITER = 100;
void LM(double(*Func)(const Mat &input, const Mat ¶ms), // function pointer
const Mat &inputs, const Mat &outputs, Mat ¶ms);
double Deriv(double(*Func)(const Mat &input, const Mat ¶ms), // function pointer
const Mat &input, const Mat ¶ms, int n);
// The user defines their function here
double Func(const Mat &input, const Mat ¶ms);
int main()
{
// For this demo we're going to try and fit to the function
// F = A*sin(Bx) + C*cos(Dx)
// There are 4 parameters: A, B, C, D
int num_params = 4;
// Generate random data using these parameters
int total_data = 100;
double A = 5;
double B = 1;
double C = 10;
double D = 2;
Mat inputs(total_data, 1, CV_64F);
Mat outputs(total_data, 1, CV_64F);
for(int i=0; i < total_data; i++) {
double x = -10.0 + 20.0* rand() / (1.0 + RAND_MAX); // random between [-10 and 10]
double y = A*sin(B*x) + C*cos(D*x);
// Add some noise
// y += -1.0 + 2.0*rand() / (1.0 + RAND_MAX);
inputs.at<double>(i,0) = x;
outputs.at<double>(i,0) = y;
}
// Guess the parameters, it should be close to the true value, else it can fail for very sensitive functions!
Mat params(num_params, 1, CV_64F);
params.at<double>(0,0) = 1;
params.at<double>(1,0) = 1;
params.at<double>(2,0) = 8; // changing to 1 will cause it not to find the solution, too far away
params.at<double>(3,0) = 1;
LM(Func, inputs, outputs, params);
printf("True parameters: %f %f %f %f\n", A, B, C, D);
printf("Parameters from GaussNewton: %f %f %f %f\n", params.at<double>(0,0), params.at<double>(1,0),
params.at<double>(2,0), params.at<double>(3,0));
return 0;
}
double Func(const Mat &input, const Mat ¶ms)
{
// Assumes input is a single row matrix
// Assumes params is a column matrix
double A = params.at<double>(0,0);
double B = params.at<double>(1,0);
double C = params.at<double>(2,0);
double D = params.at<double>(3,0);
double x = input.at<double>(0,0);
return A*sin(B*x) + C*cos(D*x);
}
//calc the n-th params' partial derivation , the params are our final target
double Deriv(double(*Func)(const Mat &input, const Mat ¶ms), const Mat &input, const Mat ¶ms, int n)
{
// Assumes input is a single row matrix
// Returns the derivative of the nth parameter
Mat params1 = params.clone();
Mat params2 = params.clone();
// Use central difference to get derivative
params1.at<double>(n,0) -= DERIV_STEP;
params2.at<double>(n,0) += DERIV_STEP;
double p1 = Func(input, params1);
double p2 = Func(input, params2);
double d = (p2 - p1) / (2*DERIV_STEP);
return d;
}
void LM(double(*Func)(const Mat &input, const Mat ¶ms),
const Mat &inputs, const Mat &outputs, Mat ¶ms)
{
int m = inputs.rows;
int n = inputs.cols;
int num_params = params.rows;
Mat r(m, 1, CV_64F); // residual matrix
Mat r_tmp(m, 1, CV_64F);
Mat Jf(m, num_params, CV_64F); // Jacobian of Func()
Mat input(1, n, CV_64F); // single row input
Mat params_tmp = params.clone();
double last_mse = 0;
float u = 1, v = 2;
Mat I = Mat::ones(num_params, num_params, CV_64F);//construct identity matrix
int i =0;
for(i=0; i < MAX_ITER; i++) {
double mse = 0;
double mse_temp = 0;
for(int j=0; j < m; j++) {
for(int k=0; k < n; k++) {//copy Independent variable vector, the year
input.at<double>(0,k) = inputs.at<double>(j,k);
}
r.at<double>(j,0) = outputs.at<double>(j,0) - Func(input, params);//diff between estimate and observation population
mse += r.at<double>(j,0)*r.at<double>(j,0);
for(int k=0; k < num_params; k++) {
Jf.at<double>(j,k) = Deriv(Func, input, params, k); //construct jacobian matrix
}
}
mse /= m;
params_tmp = params.clone();
Mat hlm = (Jf.t()*Jf + u*I).inv()*Jf.t()*r;
params_tmp += hlm;
for(int j=0; j < m; j++) {
r_tmp.at<double>(j,0) = outputs.at<double>(j,0) - Func(input, params_tmp);//diff between estimate and observation population
mse_temp += r_tmp.at<double>(j,0)*r_tmp.at<double>(j,0);
}
mse_temp /= m;
Mat q(1,1,CV_64F);
q = (mse - mse_temp)/(0.5*hlm.t()*(u*hlm-Jf.t()*r));
double q_value = q.at<double>(0,0);
if(q_value>0)
{
double s = 1.0/3.0;
v = 2;
mse = mse_temp;
params = params_tmp;
double temp = 1 - pow(2*q_value-1,3);
if(s>temp)
{
u = u * s;
}else
{
u = u * temp;
}
}else
{
u = u*v;
v = 2*v;
params = params_tmp;
}
// The difference in mse is very small, so quit
if(fabs(mse - last_mse) < 1e-8) {
break;
}
//printf("%d: mse=%f\n", i, mse);
printf("%d %lf\n", i, mse);
last_mse = mse;
}
}














 4万+
4万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









