









3D数学 学习笔记(3) 欧拉角与四元数
参考书籍:
《3D数学基础:图形与游戏开发》
【Numberphile数字狂】神奇四元数
常用矩阵和四元数表示“角位移”,用欧拉角表示“方位”。
欧拉角
常用约定“heading-pitch-bank”
围绕轴分别代表:y、x、z,使用的是左手坐标系,从惯性坐标系到物体坐标系。要注意的是**heading使用的是惯性坐标,pitch和bank使用的是物体坐标系。这也是形成万向锁的原因(heading为惯性坐标)。**在Unity中,面板中Transform的Rotation就是使用这个约定。通常规定heading和bank范围在[-180°,180°],pitch范围在[-90°,90°]。
“roll-pitch-yaw”
围绕轴分别代表:z、x、y,从物体坐标系到惯性坐标系。不同于上面那个y,这个yaw代表的是物体坐标系。
heading 和 yaw的区别:
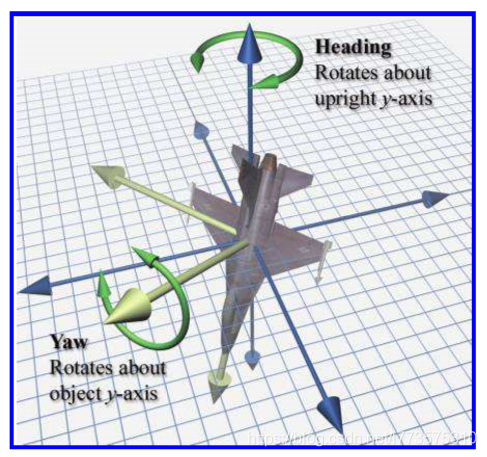
万向锁
如果pitch角为±90°,则第一次(y轴)和第三次(z轴)旋转轴相同。y是惯性坐标,一直向上,pitch转到±90°,bank轴就会和竖直轴平行。为了消除这种两个轴同时控制同一个方向的现象,规定在万向锁情况下,只使用heading来控制竖直轴,及pitch为±90°时,bank为0。
插值计算
wrap(x):将x限制在(-180°,180°],下面公式中’⌊⌋'符号表示:符号内的值向下取整。

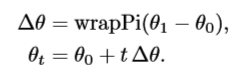
在Unity中,实现wrapPi(x)也可以直接调用Mathf.Repeat()实现。伪代码如下:
wrapPi(x) = Mathf.Repeat(x,360°) - 180°
四元数
绕n轴旋转θ角。

负四元数
q和-q代表的实际角位移是相同的。因为-q旋转轴倒置,同时转相反方向,就像正面的顺时针和反面的逆时针其实是一个结果。

单位四元数(Identity)
- [1, 0]
[-1, 0]虽然代表相同角位移,但是在数学上是不相同。
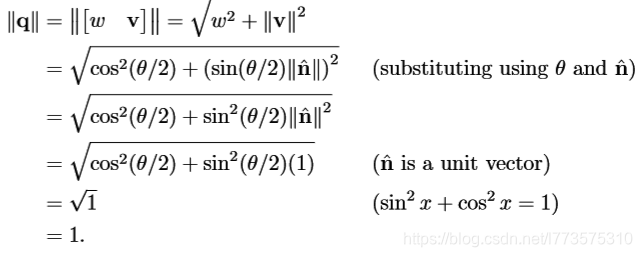
四元数的模
如果为了用四元数表示方位,就要符合这个规则的单位四元数。
四元数共轭
即轴反向。

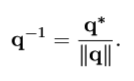
四元数的逆
q乘以q-1可以得到单位四元数[1, 0]。
四元数乘法(叉乘)
四元数乘法实际就是旋转。

- (ab)c = a(bc)
- ab ≠ ba
- ‖q1q2‖ = ‖q1‖‖q2‖
- (ab)-1 = b-1a-1 (可扩展到多个四元数)
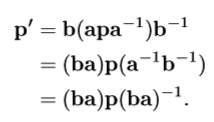
实现点p绕n旋转,q为[cos(θ/2), sin(θ/2)]:
p’ = qpq-1
先绕a旋转,后绕b旋转。要注意的是执行计算顺序是倒过来的:
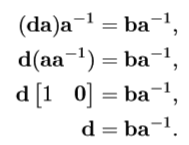
四元数的“差”(角位移)
一个方位(a)到另一个方位(b)的角位移(d),即da = b。执行顺序从右往左。
推导过程,两边同时右乘a-1:
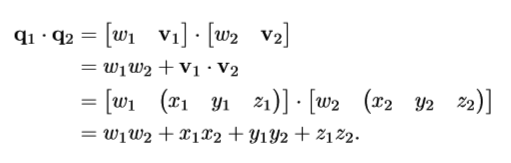
四元数的点乘
类似与向量点乘,a·b越大,a和b代表的角位移就越相似。对于单位四元数a和b,有 -1 ≤ a·b ≤ 1。
四元数的对数
结果一般不是单位四元数。
四元数的指数
结果总是单位四元数。

四元数求幂
可以理解为角度缩放。当t从0到1时,四元数q从[1, 0]变到q。q1/3表示q的三分之一个角位移,即如果q表示绕x轴绕90度,q1/3就表示绕x轴绕30度。不过一般的指数运算对四元数都不适用,如(q4)1/2 ≠ q2,(qs)t ≠ qst。
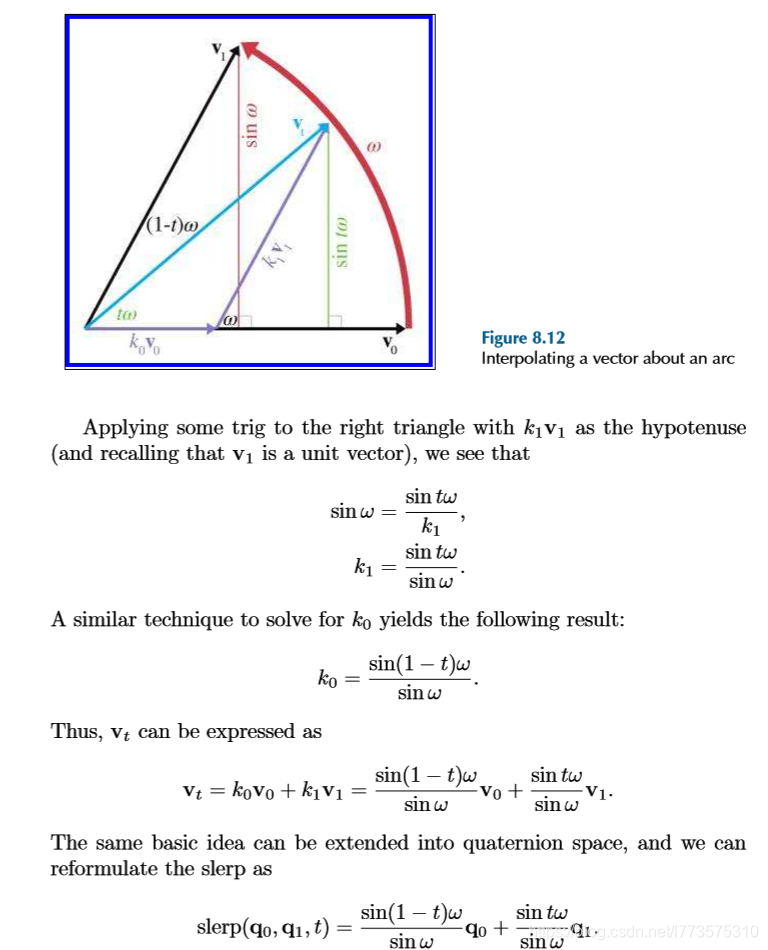
四元数插值slerp(Spherical Linear Interpolation)
理论上计算过程:
- 计算四元数的差:∆q = q1q0-1
- 计算差的一部分(求幂):(∆q)t
- 最后从开始值加上这个部分(叉乘):(∆q)tq0

实际用更有效的方法:
即理解为两个向量之间求弧插值。投影到一个2D平面,即可方便推导出结果。角度w可以用点乘来算。
需要注意的是:
- 因为q和-q虽然代表相同方位,但是计算的时候结果会不一样。解决方案是点乘结果如果为负就反转。
- 如果q0和q1非常接近(点乘接近1,sinθ非常小),除法可能会有问题。解决方案是直接用线性插值计算。
矩阵、欧拉角和四元数比较

- 坐标间转换向量,选择矩阵形式。
- 需要大量保存方位数据(如动画)时,使用欧拉角或四元数。嵌套坐标系之间的连接,用四元数。
- 平滑插值只能用四元数。
表达形式之间的转换
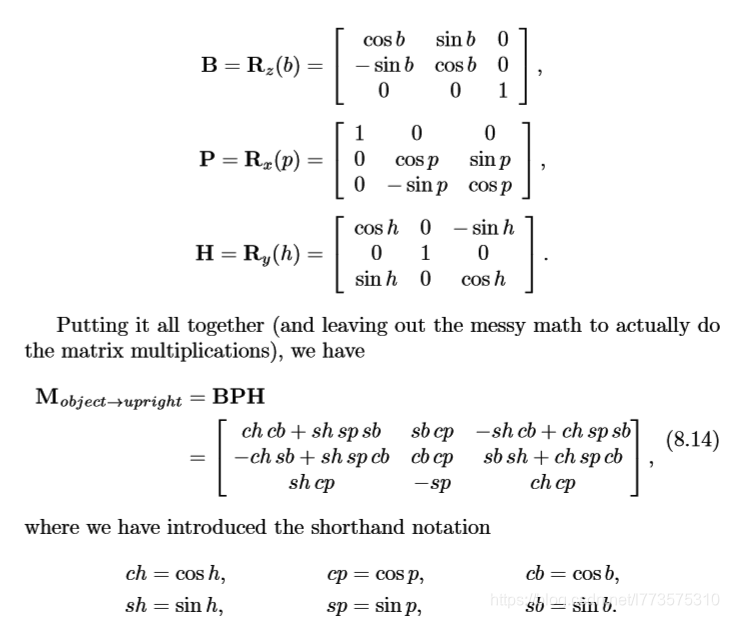
欧拉角转换到矩阵
HPB(heading pitch bank),可参考最上面欧拉角。
物体坐标到惯性坐标
惯性坐标到物体坐标
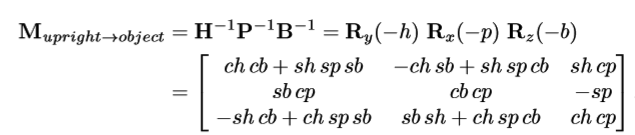
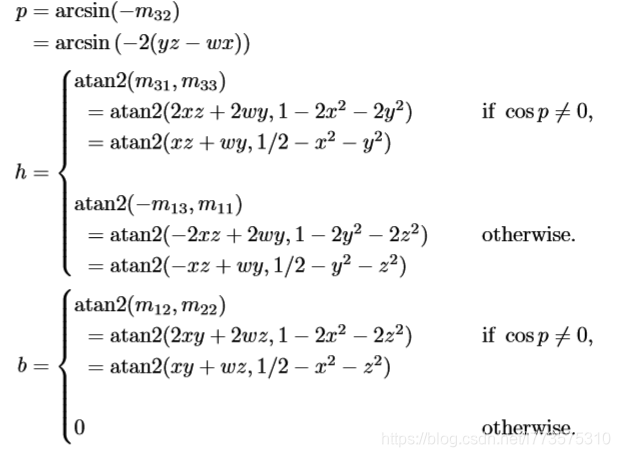
矩阵转换到欧拉角
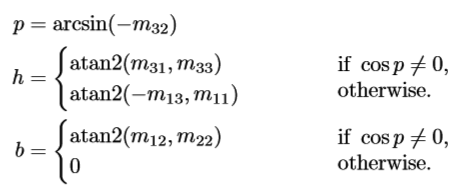
直接通过三角函数计算即可,不过注意一些特殊角度如90°等,需要判断和赋特殊值。
下面是物体到惯性坐标下hpb的计算(部分过程省略):
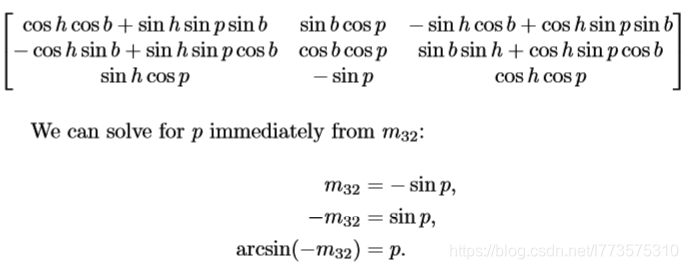


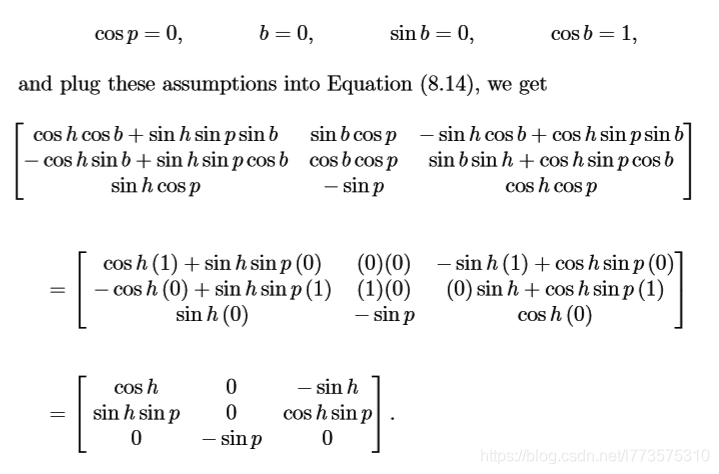
在cosp = 0时,p = ±90°,即面向上或向下,万向锁,设置b为0。p和h的值可以直接算出来了。
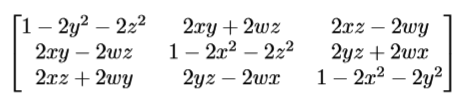
四元数转到矩阵
矩阵转到四元数

下图方法计算都为正值,没有选择正根还是负根的依据。
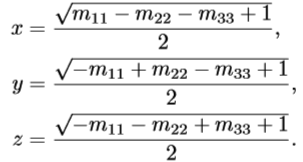
但是可以用任意一个非负根来计算另外三个分量的值。
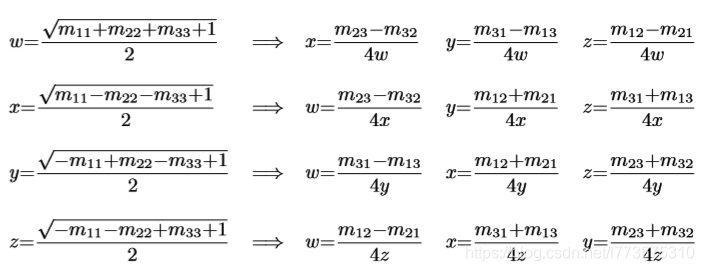
建议先判断w,x,y,z中最大一个,用矩阵的对角线来计算该元素,然后用上图计算其他三个。
欧拉角转四元数

物体-惯性四元数 是 惯性-物体四元数的共轭。
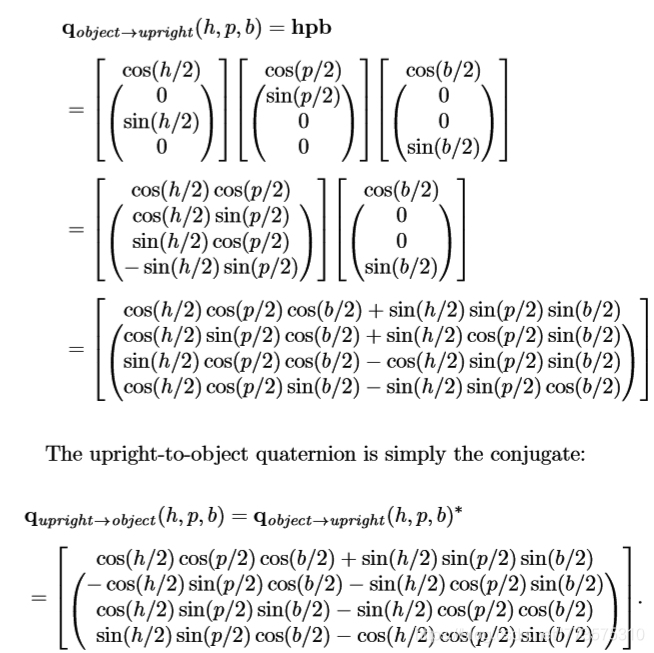
四元数转欧拉角
先从四元数转矩阵,再从矩阵转到欧拉角。
在Unity中的应用
对Vector3向量方向旋转方法:四元数 * 3D方向向量。(注意顺序)
Quaternion rotation; //旋转角度
Vector3 direction; //原始方向
newDirection = rotation * direction; //旋转后的方向
子物体旋转角转换到世界坐标下的旋转角:父对象旋转角 * 子对象旋转角。
newRotation = transfrom.rotation * subRotation;














 997
997











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









