







MEMS(Micro-Electro-Mechanical System)是指集机械元素、微型传感器以及信号处理和控制电路、接口电路、通信和电源于一体的完整微型机电系统。MEMS惯性传感器可构成低成本的INS/ GPS 组合导航系统 ,是一类非常适合构建微型捷联惯性导航系统的惯性传感器。MEMS惯性传感器的突出特点使其在众多的民用和军用领域具有广阔的应用前景。
MEMS惯性传感器的背景状况
MEMS技术最早由Richard Pfeynman(1965年获得诺贝尔物理奖),在1959年提出设想。1962年硅微型压力传感器问世。
1979年Roylance和Angell开始压阻式微加速计的研制。1991年Cole开始电容式微加速度计的研制。
惯性传感器包括加速度计(或加速度传感计)和角速度传感器(陀螺)以及它们的单、双、三轴组合IMU(惯性测量单元),AHRS(包括磁传感器的姿态参考系统)。
MEMS加速度计是利用传感质量的惯性力测量的传感器,一般由标准质量块(传感元件)和检测电路组成。根据传感原理不同,主要有压阻式、电容式、压电式、隧道电流式、谐振式、热电耦合式和电磁式等。
1998年,美国CSDL设计研制了最早的MEMS陀螺。同年,Drapor实验室研制了另一种形式的MEMS陀螺。 MEMS陀螺是利用震动质量块被基座(壳体)带动旋转时的哥氏效应来传感角速度的原理制成。
主要形式有框架驱动式(内、外框架两种)梳状驱动式、电磁驱动式等。
IMU由于是MEMS技术组合的微型惯性测量单元,所以很多地方称为MIMU。主要由三个MEMS加速度传感器及三个陀螺及解算电路组成。
AHRS则为包括三个磁传感器的IMU,并且依据四元素法进行了解算,直接可输出一个运动体的俯仰角、横滚角和航向角。
低精度MEMS惯性传感器作为消费电子类产品主要用在手机、游戏机、音乐播放器、无线鼠标、数码相机、PD、硬盘保护器、智能玩具、计步器、防盗系统、GPS导航等便携式。由于具有加速度测量、倾斜测量、振动测量甚至转动测量等基本测量功能,有待挖掘的消费电子应用会不断出现。
中级MEMS惯性传感器作为工业级及汽车级产品,则主要用于汽车电子稳定系统(ESP或ESC)GPS辅助导航系统,汽车安全气囊、车辆姿态测量、精密农业、工业自动化、大型医疗设备、机器人、仪器仪表、工程机械等。 高精度的MEMS惯性传感器作为军用级和宇航级产品,主要要求高精度、全温区、抗冲击等指数。主要用于通讯卫星无线、导弹导引头、光学瞄准系统等稳定性应用;飞机/导弹飞行控制、姿态控制、偏航阻尼等控制应用、以及中程导弹制导、惯性GPS导航等制导应用、远程飞行器船舶仪器、战场机器人等。
MEMS惯性传感器的工作原理
MEMS惯性传感器是以集成电路工艺和微机械加工工艺为基础,在单晶硅片上制造出来的微机电系统,包括微机械加速度计、微机械陀螺仪和微惯性测量组合(MIMU)。MEMS 惯性传感器的工作原理是经典力学中的牛顿定律,其功能是测量运动物体(如车辆、飞机、导弹、舰艇、人造卫星等)的质心运动和姿态运动,进而可以对运动物体实现控制和导航。MEMS惯性器件与非MEMS惯性器件相比,其体积和价格可减少几个数量级,对国防具有重大战略意义。基于MEMS惯性器件构建低成本、高性能的微型惯性导航系统正在成为当前惯性技术领域的一个研究热点。
MEMS惯性传感器的测试
MEMS惯性传感器的测试跟一般的IC测试之不同在于它需要外界的刺激,因此除了自动化测试设备(ATE)、ATE界面板(DIB)和器件巢板(DUT board)等常见的配置外,还需要一个极其重要的设备——产生和传递刺激(stimulus)的设备。这个设备是用户化了的,不同的传感器特别是不同类型的传感器所使用的不同、甚至完全不同。因此这样的设备往往不是工业标准化的,客户在设计新的惯性传感器的同时必须跟设备制造商一起开发相应的设备。这个开发的成本是非常昂贵的,以百万美元计。哪怕是改一下传感器封装外形,测试面或腔必须重新设计,一般需20万美元、8到12周。如果没有代理测试的工厂,小公司即使能设计生产惯性传感器,也很难大批量销售。
另外,测试时间是影响产品成本的一个重要因素,尤其是惯性传感器,因为机械的刺激往往比一般的电路测量慢得多。而且,机械刺激在触发后必须等待足够的时间才稳定,还必须在关掉后等待足够的时间才完全消失。为缩短测试时间,除了改进设备的力学设计外,提高测试并行度是立竿见影的办法。
MEMS传感器的应用领域
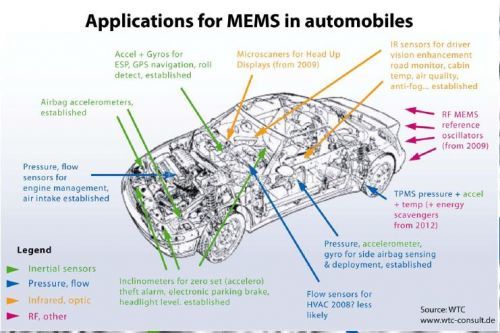
MEMS微惯性传感器主要应用领域是汽车、惯性导航、消费品电子、IT附件。下图所示的是汽车中的MEMS应用,可以看到加速度计和陀螺仪占有很大的比例。目前由于微陀螺仪的价格较高,其应用的潜力还没有完全开发,但如果技术上出现突破大大降低陀螺仪的生产成本,那么在导航系统中将会有很大的市场潜力。
未来的微惯性器件主要的发展方向是在在满足民用需求的精度和稳定度的前提下,尽量小型化和降低价格。尤其是陀螺仪,只有降低陀螺仪的价格,集成的IMU(inertia measurement unit,包含3个陀螺仪,3个加速度计)才能够在汽车导航,娱乐性电子的中的虚拟现实(运动感受)中得到广泛的应用。
MEMS惯性传感器的发展趋向
MEMS惯性传感器的发展趋势主要有以下几个方面:
1、技术方面:精度将不断提高,以陀螺为例,有替代低精度光纤陀螺的趋势。对消费类应用,更寻求进一步简化制造工艺,降低成本的趋势。同时,集成化也是未来发展的趋势,不仅模块制造商走软件、硬件集成的路子,越来越多的上游芯片厂家也走集成块的技术路线。因而不断有双轴、三轴加计、陀螺芯片问世。
2、竞争力方面:消费类将竞争最为惨烈,新厂家将不断涌进,比投资、比规模将是必然趋势。上下游相互倾轧、收购、重组将会上演。
3、合作方面:由于产品细分的缘故全球竞争与合作必然结果。上游厂家希望找到下游客户,下游希望寻找合适的供应商,因而产业联盟可能出现。
4、应用方面:无疑无论是消费类应用,工业级军工级应用,市场会急骤扩大,应用会越来越广泛。
注意:目前的智能手机(包括Android和Iphone)里面都集成有MEMS惯性传感器,所以就可以开发各种各样好玩的游戏和项目!














 9445
9445











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









