







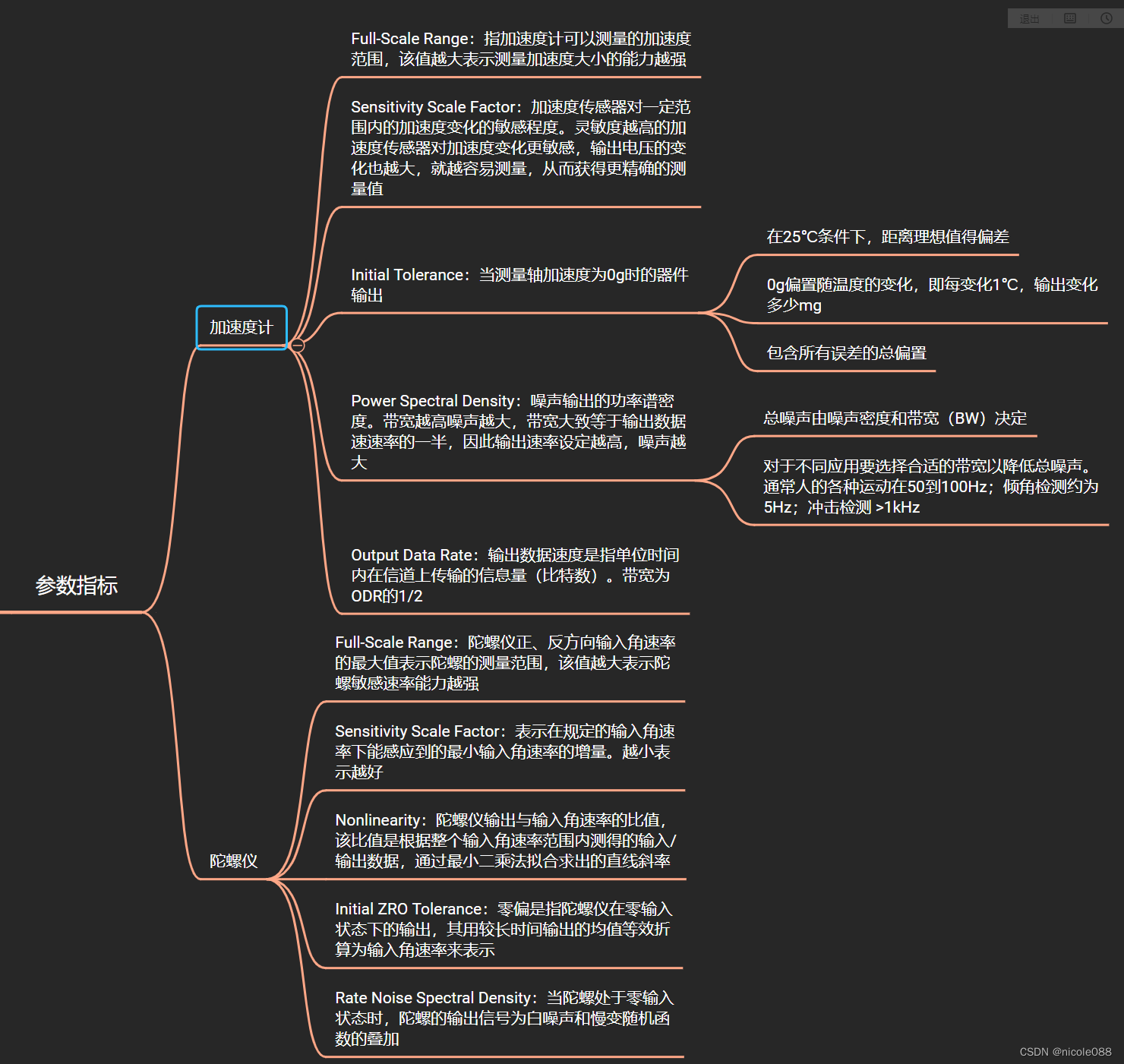
01 技术指标解读
以 ICM40607 规格书中的 SPECIFICATIONS 为例说明。
除了以上,在不同的应用场景下,有可能考虑到以下两个参数
振动整流误差(Vibration Rectification ):是指陀螺/加速度计在直线振动或角振动的条件下,陀螺/加速度计输出信号中出现虚假的直流分量。这种虚假输出会引起零点漂移和标度因数改变,而这两个关键参数的变化将引起整个惯性系统的测量误差。 振动整流误差值越小,陀螺仪/加速度计输出越稳定。
振动整流误差 = 有震动下平均输出 - 无振动下的平均输出。
选用低振动整流误差的产品,可以在一定程度上降低载体对于减震措施的依赖程度,从而提高载体使用寿命以及导航精准度。
重现性 (Repeatability): 在出产是很容易将陀螺 Bias 校准到 0,但是随着使用时间的变化、温度的变化 Bias 也会发生变化。在一些没有办法开关机校准的产品上,特别注意这个参数
02 重要误差介绍
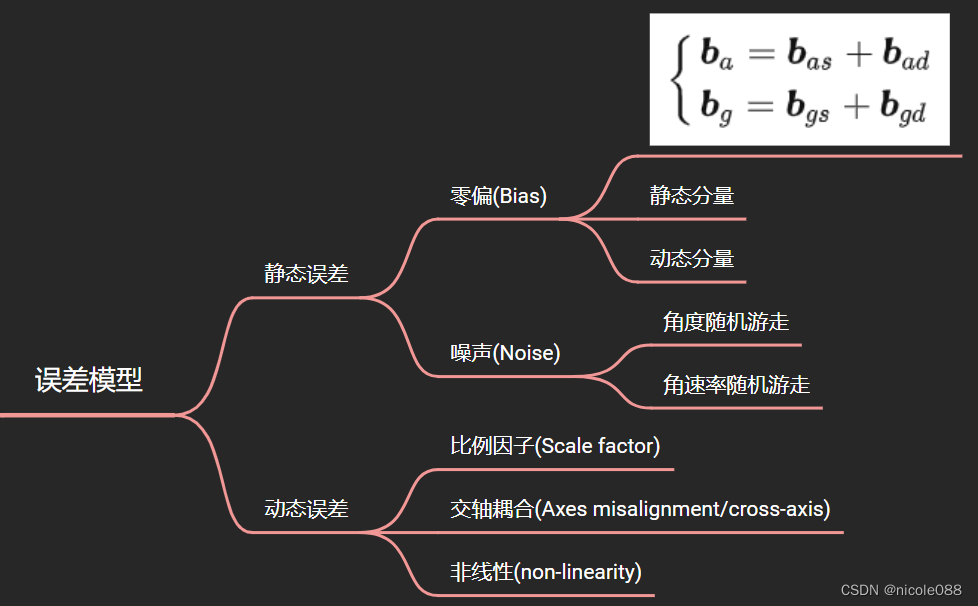
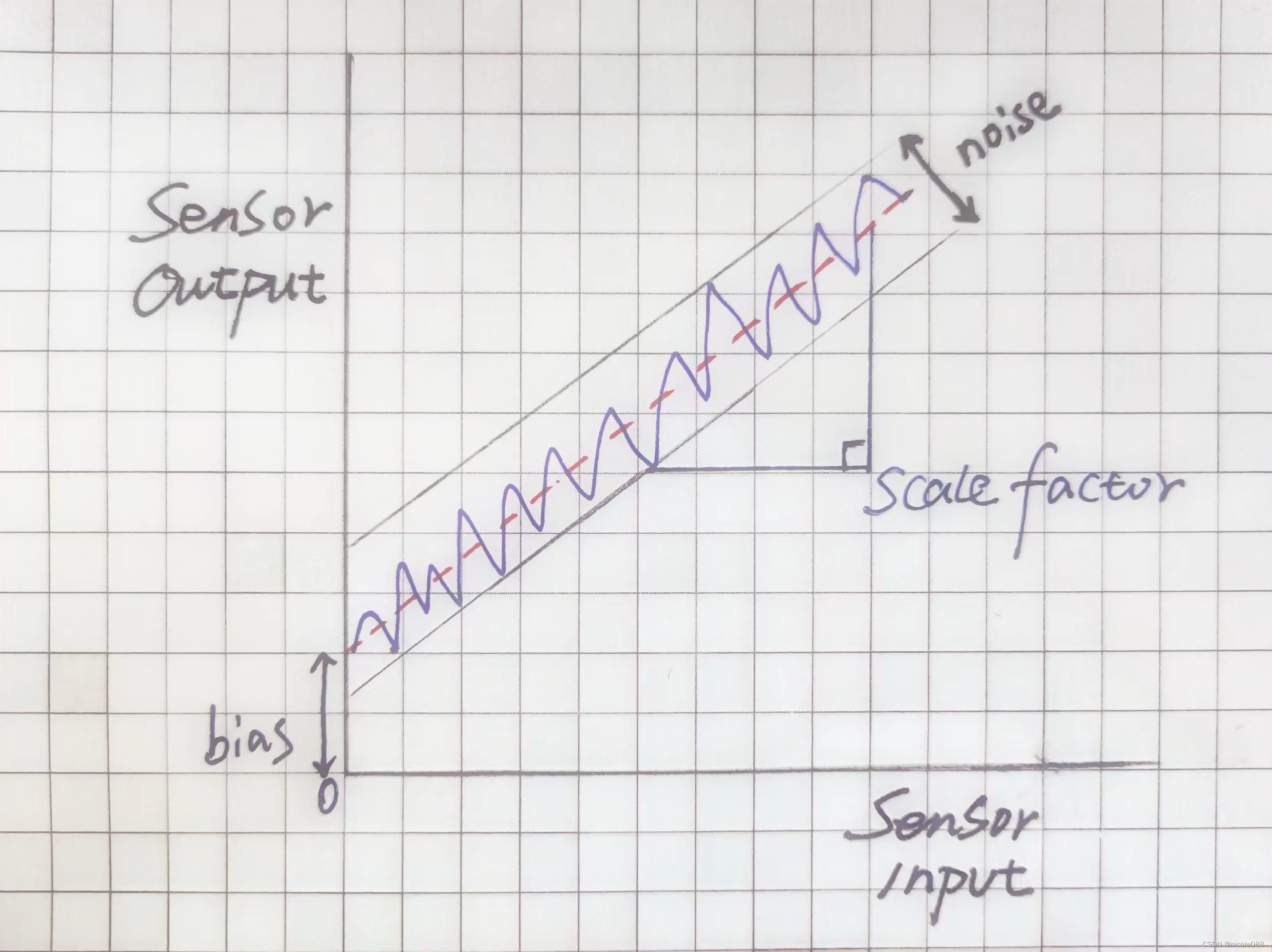
零偏(bias)
理论上在静止状态下三轴输出为0,0,0,但实际上输出有一个小的偏置,这是零偏的静态分量(也称固定零偏)。当然存在零偏的动态分量,动态 bias 不是一个参数,它会在一定范围内缓慢随机飘移。
噪声(noise: angle random walk/velocity random walk)
可以简单理解为 高斯白噪声,(白噪声是一种频率远高于传感器采样频率的高频误差,是信号的随机波动)
白噪声给陀螺仪带来的误差称为Angular random walk(ARW),误差单位: rad/s/sqrt(Hz), deg/s/sqrt(Hz), deg/sqrt(hr), 假设某器件的ARW为0.12 deg/sqrt(hr),可简单理解为在1小时内,由ARW造成正负0.12°的误差。
给加速度计带来的误差称为Velocity random walk(VRW),误差单位:m/s2/sqrt(Hz), m/s/sqrt(h), mGal/sqrt(Hz)
比例因子(scale factor)
刻度误差, 输出被测量的信号/输入物理量
交轴
每个轴的输出受到其它两个轴的输入的影响
非线性
由比例因子非线性导致的输出误差
零偏稳定性(准确的将应该是零偏不稳定性)
在固定条件(通常为恒温)下,在指定的时间段内传感器的零偏发生的变化。可以把它理解为零偏随时间的缓慢变化,假设在刚开始时零偏大小是某个值,那么过一段时间之后,零偏便发生了变化,具体变化成了多少,无法预估,所以就要给他一个概率区间,来描述它有多大的可能性落在这个区间内,时间越长,区间越大。
03 深入理解白噪声
3.1 角度随机游走
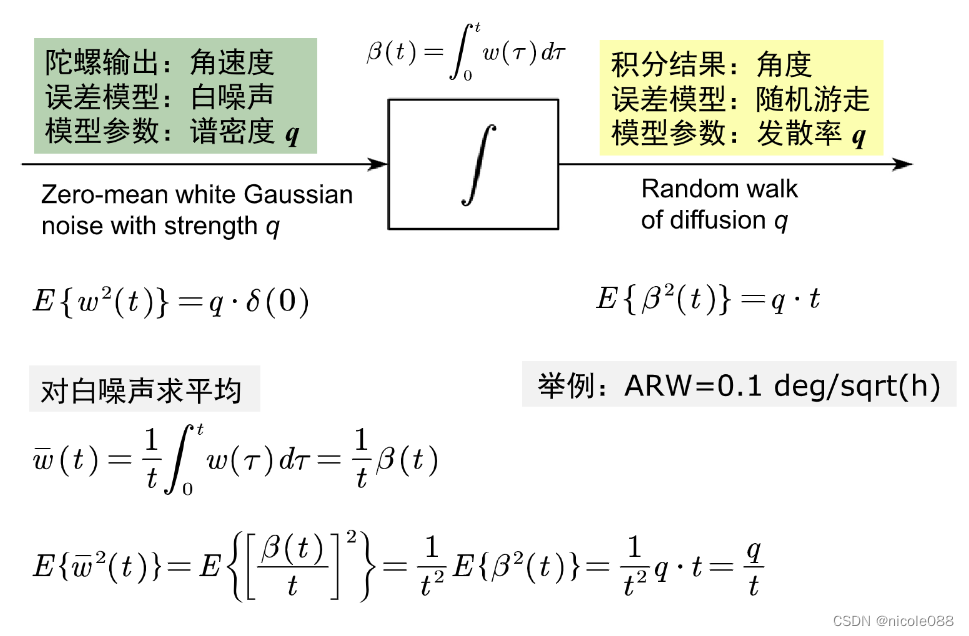
对角速率做积分,必然也对噪声也做了积分。白噪声的积分并不是白噪声,而是一个 马尔可夫过程,即当前时刻的误差是在上一时刻误差的基础上累加一个随机白噪声得到的。
角度误差中所含的马尔可夫性质的误差,称为角度随机游走。
注意:既然是噪声的指标,那么就是统计学指标,是随机变量,这种噪声既不能出厂前校准也不能被补偿。
3.2 角速率随机游走
对角加速度噪声积分
角速率误差中所含的马尔可夫性质的误差,称为角速率随机游走。
3.3 马尔可夫
马尔可夫推导引出功率谱密度的概念。具体的推导详见:严恭敏老师的连续随机系统的离散化与连续时间KF 教程讲解
下面直接得出马尔可夫性质:
- 马尔可夫性质的误差是由宽带角加速率白噪声累积的结果
- 功率谱密度(PSD)的单位
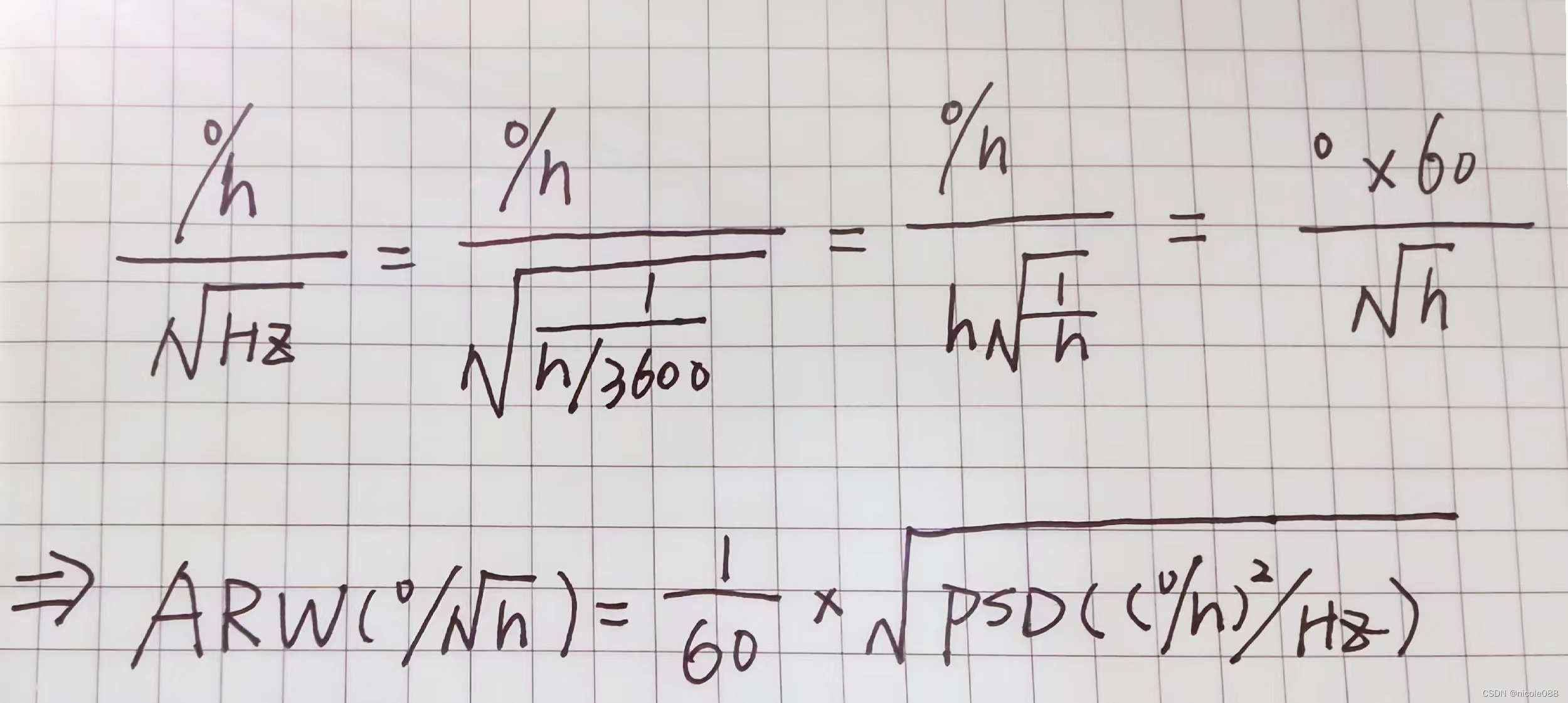
- 陀螺白噪声与角度随机游走的关系


















 799
799

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











