







1 SimRobot远程链接机器人
在Make目录Linux下执行过make命令,那么在Build目录下就会生成相应的文件,默认执行make会自动生成SimRobot等文件,SimRobot子目录下就有SimRobot可执行文件。执行SimRobot,点击 File--Open--选择Config目录下的Scenes下的RemoteRobot.ros2,打开,弹出一个对话框填写你的机器人
先单击raw画面,你就会看到SimRobot的工具栏上出现7种颜色的小方块。要创建新的颜色表需先清除以前的,点击clear按钮,会发现colorTable里的颜色清除掉了。然后选择点击SimRobot工具栏上的一种颜色,再到raw窗口去点击对应的颜色,如你在SimRobot上点击了橘黄色,那么你就在raw窗口点击对应的橘黄色(应该是机器人所需踢的球
在Make目录Linux下执行过make命令,那么在Build目录下就会生成相应的文件,默认执行make会自动生成SimRobot等文件,SimRobot子目录下就有SimRobot可执行文件。执行SimRobot,点击 File--Open--选择Config目录下的Scenes下的RemoteRobot.ros2,打开,弹出一个对话框填写你的机器人
ip。如果没有弹出对话框。那么就是你之前运行过Make/Linux目录下的login,如果是这种情况,那么先关闭SimRobot,然后运行login 192.168.1.132(你运行的时候需要填写你的机器人ip), 最后再打开SimRobot,选择RemoteRobot.ros2。不出意外就会链接上机器人了。链接上机器人后找到image下的raw双击,segmented,双击,以及colorSpace下的colorTable,出现如图所示画面。
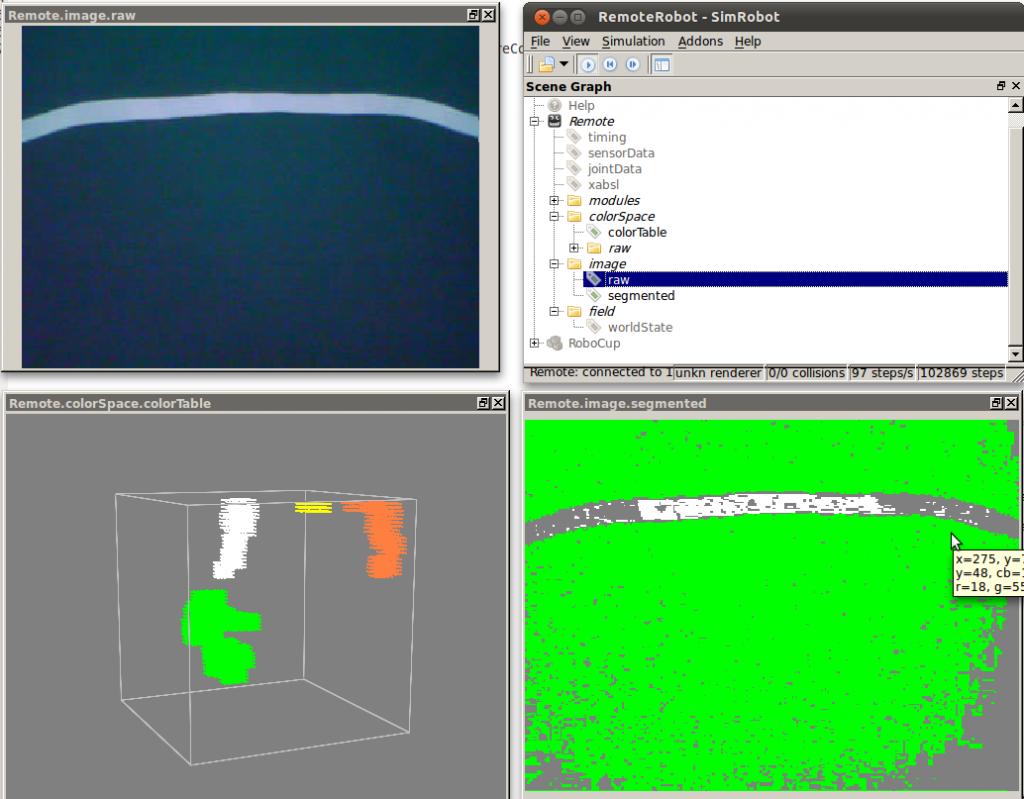
先单击raw画面,你就会看到SimRobot的工具栏上出现7种颜色的小方块。要创建新的颜色表需先清除以前的,点击clear按钮,会发现colorTable里的颜色清除掉了。然后选择点击SimRobot工具栏上的一种颜色,再到raw窗口去点击对应的颜色,如你在SimRobot上点击了橘黄色,那么你就在raw窗口点击对应的橘黄色(应该是机器人所需踢的球
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 4004
4004











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









