







 本文详细探讨了PID控制原理,包括比例(P)、积分(I)和微分(D)三部分的作用,解释了如何通过调整参数来改善系统性能。同时,介绍了位置式PID和增量式PID的区别,如位置式的全量输出可能导致计算量大,而增量式PID虽然有静态误差,但误动作影响小。总结指出,在高精度控制中适用位置PID,而在以步进电机为执行器的系统中,增量式PID更为合适。
本文详细探讨了PID控制原理,包括比例(P)、积分(I)和微分(D)三部分的作用,解释了如何通过调整参数来改善系统性能。同时,介绍了位置式PID和增量式PID的区别,如位置式的全量输出可能导致计算量大,而增量式PID虽然有静态误差,但误动作影响小。总结指出,在高精度控制中适用位置PID,而在以步进电机为执行器的系统中,增量式PID更为合适。
第一章:数字PID控制
1.PID控制原理: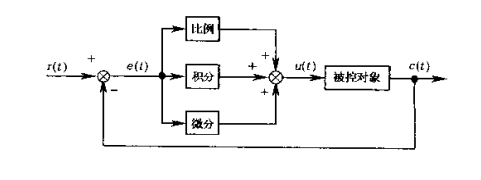
图为PID控制原理的最简形式:
e(t) = 设定值 - 实际值
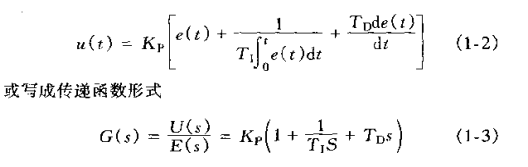
控制规律为:
P:比例控制部分,当产生误差后,系统会产生控制作用,减小偏差。但是偏差始终减少不到。所以会与设定值有一个误差,叫做静态误差。对于参数P的控制作用,可以增加开环增益,但是P加大后会不稳定。
I:积分控制部分:积分部分的引入是为了消除静态误差,提高系统的无差度。I加大后会增加系统的稳定性,但超调会明显,所以在PID的控制之上,会对积分部分采取一些操作,以减小超调。
D:微分控制部分:能反映信号的偏差的变化趋势。加快系统的动作迅速,较小调节时间。
有一个形象的比喻:
是不是对PID的理解又深了一步呢?
2.PID分为位置式PID和增量式PID:
区别:位置式PID是与过去的位置有关。容错性小
增量式PID只与增量有关。
3.位置式PID公式:
#include <stdio.h>
#include <stdlib.h>
struct PID{
float Speed_Set ;
float Speed_Actual;
float Kp;
float Ki;
float Kd;
float Err;
float Last_Err;
float Sum_Err;
} PID;
void PID_Init (void){
printf("PID_Init Begin:\n");
PID.Speed_Set = 0  最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1406
1406

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









