







1.四旋翼无人机UAV(unmanned aerial vehicles)简介
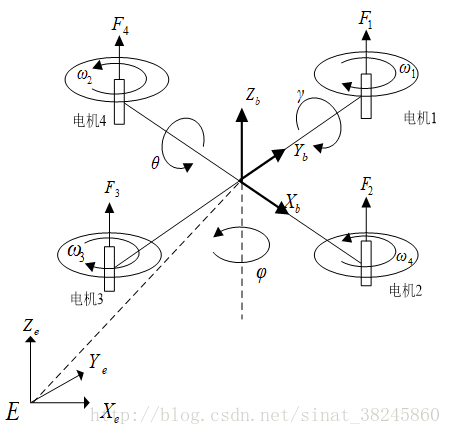
四旋翼无人机是一种能够垂直起降的非共轴的多旋翼飞行器,同一对角线上的一组旋翼采用逆时针旋转,另一组旋翼采用顺时针旋转,相互抵消了旋翼旋转带来的反扭矩力,通过调节对称分布的四个旋翼转速,可以不断改变无人机的位置,实现对飞行姿态的控制,比如悬停、俯仰、升降和横滚运动。无人机有4个输入(4个电机),6个输出(上下移动、左右移动和横滚耦合在一起),所以无人机控制系统是一个四输入六输出的欠驱动系统。根据四轴运动方式的不同,可将无人机分为“+”型和“×”型。本次采用“+”型结构,并运用牛顿第二定律及欧拉方程来建立动力学模型。
2.导航坐标系E(X
e,
Y
e,
Z
e
)和机体坐标系B(X
b
,Y
b
,Z
b
)。
导航坐标系用于研究无人机相对于地面的运动状态,确定机体的空间位置坐标。它忽略地球曲率,即将地球表面假设成一张平面。按选取方法的不同,通常按“东、北、天”或按“北、东、地”为顺序构成右手直角坐标系。
机体坐标系则是固定在无人机上,时刻随着无人机的运动而运动。通常用于研究飞机的转动。














 1076
1076











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









