







硬件接线:


FTDI串口线,直接与电脑相连(确定方向不要接反)
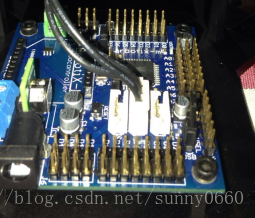
机械臂与排线相连,三个端口等效。
管脚控制USB供电(USB)或者电源线接电(VIN),电源线接12V5A电源线
安装Arduino
$ mkdir ~/tools
$ cd ~/tools
下载arduino-1.05或者1.06,解压缩到当前目录,启动arduino(可能会遇到java没有安装的问题,安装java即可):
$ ~/tools/arduino-1.0.5/arduino
安装arbotix包:
$ sudo apt-get update
$ sudo apt-get install ros-indigo-arbotix(对于ros-kinetic来说,需要安装源码进行编译,参照https://github.com/Interbotix/arbotix)
下载arbotix库源码:
$ cd ~/tools/
$ git clone https://github.com/Interbotix/arbotix.git
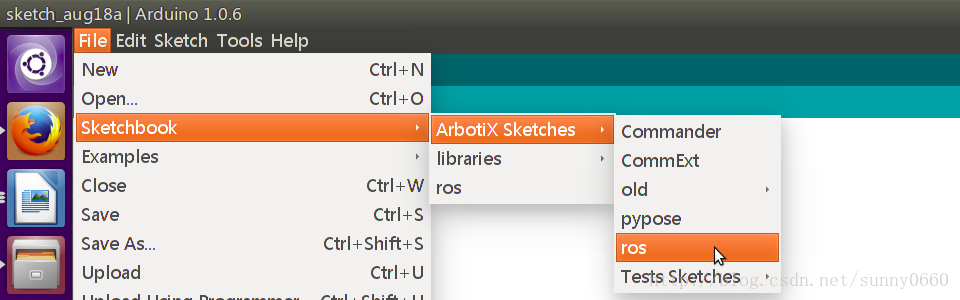
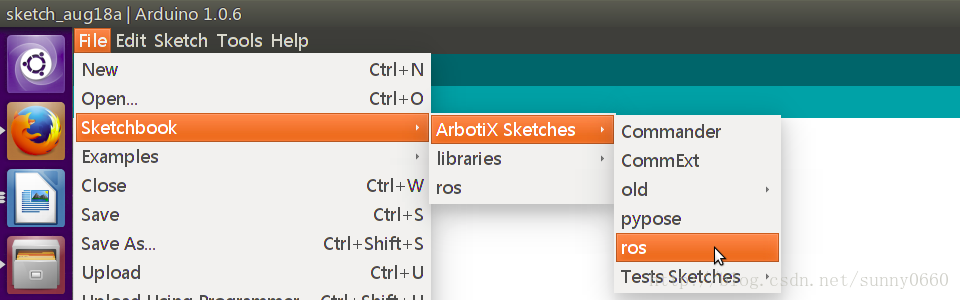
将该文件夹拷贝到库文件所在的文件夹,重启arduino,可以发现有新的ros样例文件,以及新的开发板选项:

ROS固件的烧录
插入FTDI线连接电脑,检查是否插入USB:
$ lsusb
插入的USB为(UART) IC:

检查ttyUSB0端口是否存在,打开新终端:
$ ls /dev/ -la
发现ttyUSB0,但是权限受到限制:

添加权限:
$ sudo chmod 777 /dev/ttyUSB0
可得到:

插入FTDI数据线,同时先安装FTDI驱动:
http://www.ftdichip.com/Drivers/VCP.htm中下载对应的FTDI驱动文件,解压缩文件,驱动安装:
$ sudo rmmod ftdi_sio
$ sudo rmmod usbserial
打开ros样例文件,选择对应的板项,选择串口。

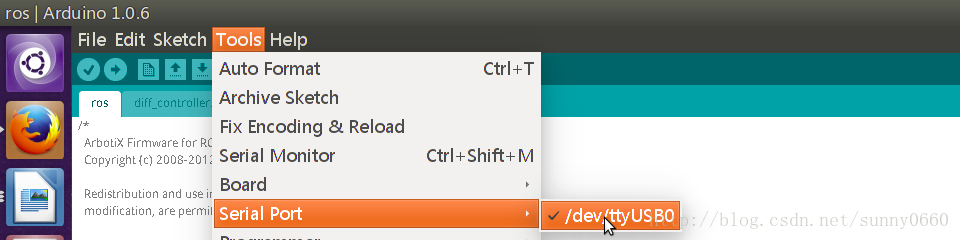
上载程序,进行固件的烧录:

安装turtlebot_arm包
安装deb包:
$ sudo apt-get install ros-indigo-turtlebot-arm
安装工作空间管理工具(rosdep初始化可能需要删除原来的初始化文件):
$ sudo apt-get install python-rosdep python-wstool
$ sudo rosdep init
$ rosdep update
创建机械臂的工作空间并且下载编译代码:
$ mkdir ~/turtlebot_arm
$ cd ~/turtlebot_arm
$ wstool init src
$ cd src
$ wstool set turtlebot_arm https://github.com/turtlebot/turtlebot_arm.git --git --version=indigo-devel
$ wstool update turtlebot_arm
$ cd ..
$ source /opt/ros/indigo/setup.bash
$ rosdep install --from-paths src -i -y
$ catkin_make
测试机械臂
连接USB线,电机线以及电源线,终端执行:
$ arbotix_terminal
检测电机:
ArbotiX Terminal --- Version 0.1
Copyright 2011 Vanadium Labs LLC
>> ls
1 2 3 4 5 .... .... .... ....
.... .... .... .... .... .... .... .... ....
进入包目录:
$ roscd turtlebot_arm_bringup
修改配置文件:
$ cd config/
$ cat arm.yaml
修改port为/dev/ttyUSB0
新终端,启动arm:
$ roslaunch turtlebot_arm_bringup arm.launch
新终端:
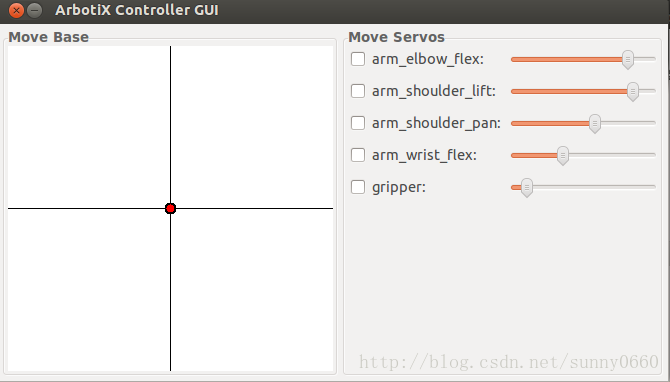
$ arbotix_gui
选中电机,进行拖动控制。














 597
597











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









