







是离散空间上的模拟导数,可以用于提取颜色变化大的边界
CVAPI(void) cvSobel( const CvArr* src, CvArr* dst,
int xorder, int yorder,
int aperture_size CV_DEFAULT(3));
xorder,yorder,x和y方向的导数阶次可选0,1,2,但不能同时为0
aperture_size 方形滤波器的宽和高,可选1,3,5,7,程序中用滚动条,所以用2*n+1
测试用图:

程序代码:
#include <highgui.h>
#include<cv.h>
#include <opencv2/legacy/legacy.hpp>
using namespace std;
int xorder=0,yorder=0,aperture_size=3;
IplImage *img_in = cvLoadImage("test.png");
IplImage *img_out = cvCreateImage(cvGetSize(img_in),IPL_DEPTH_8U,3);
IplImage *img_control = cvCreateImage(cvSize(200,200),IPL_DEPTH_8U,3);
void on_trackbar_1(int pos)
{
xorder=pos;
cvSobel(img_in,img_out,xorder,yorder,aperture_size);
cvNamedWindow("img_out",CV_WINDOW_AUTOSIZE);
cvShowImage("img_out",img_out);
}
void on_trackbar_2(int pos)
{
yorder=pos;
cvSobel(img_in,img_out,xorder,yorder,aperture_size);
cvNamedWindow("img_out",CV_WINDOW_AUTOSIZE);
cvShowImage("img_out",img_out);
}
void on_trackbar_3(int pos)
{
aperture_size=pos+pos+1;
cvSobel(img_in,img_out,xorder,yorder,aperture_size);
cvNamedWindow("img_out",CV_WINDOW_AUTOSIZE);
cvShowImage("img_out",img_out);
}
int main()
{
cvNamedWindow("img_in",CV_WINDOW_AUTOSIZE);
cvShowImage("img_in",img_in);
cvNamedWindow("img_control",CV_WINDOW_AUTOSIZE);
cvCreateTrackbar("xorder","img_control",&xorder,2,on_trackbar_1);
cvCreateTrackbar("yorder","img_control",&yorder,2,on_trackbar_2);
cvCreateTrackbar("aperture_size","img_control",&aperture_size,3,on_trackbar_3);
cvWaitKey(0);
cvDestroyAllWindows();
cvReleaseImage(&img_in);
cvReleaseImage(&img_out);
return 0;
}
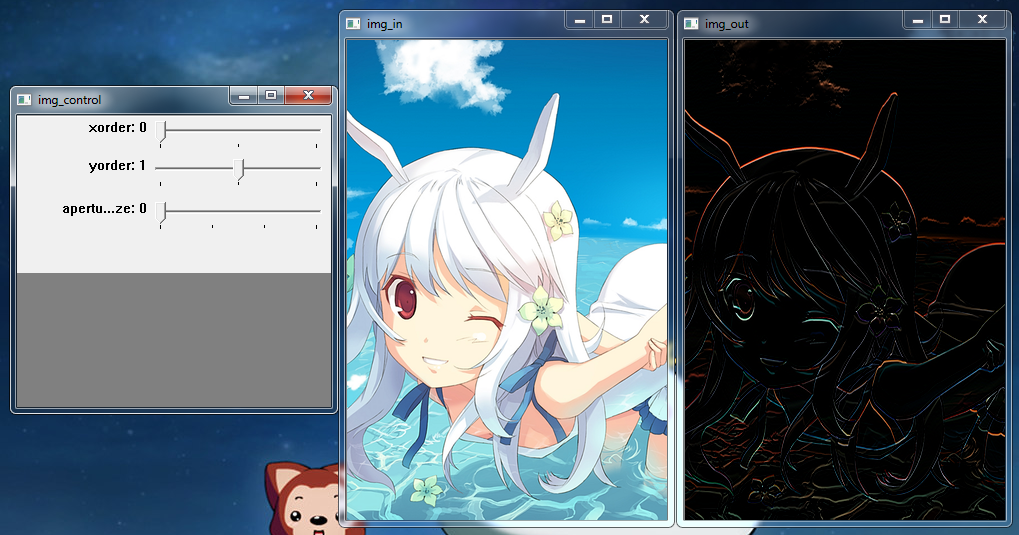
运行结果:

















 5097
5097

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









