







AI逻辑实现-选择行为树还是状态机?
关注AI的朋友可能会看过赖勇浩翻译的《有限状态机时代终结的10大理由》 ,里面谈到了状态机的诸多弊端。同时在ppt(附上下载地址)中述说了行为树的诸多优点,这里就不在赘述了。更多得是想总结一下自己玩了一阵子行为树后的一些实践体会。
个人体会:
状态机来实现AI更符合我们思维的朴素表达,我想任何一个有经验的coder都能直观得去写一个自己的AI状态机。它用于一些简单的ai其实是没有大问题的,(搜索敌人,靠近,攻击,死亡)用状态机其实更加便捷。但是面对一些复杂的ai逻辑实现就会显得比较繁杂。同时,当需要对现有行为逻辑进行扩展的时候,代码上就会显得比较吃力,因为要维护的状态量会成倍增加。
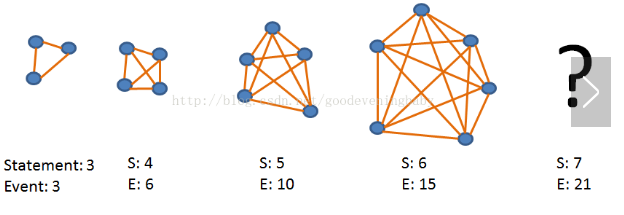
行为树,实现AI的过程更加得有技巧,框架设计者较为全面考虑了我们可能会遇到的种种情况,把每种情况都抽象成了一个类型的节点,而我们要做的就是按照规范去写节点,然后把节点连接成一颗行为树。更加得具有面向对象的味道,行为模块间的藕合度相对较低。
举个粗糙的例子来比较一下两者的不同:
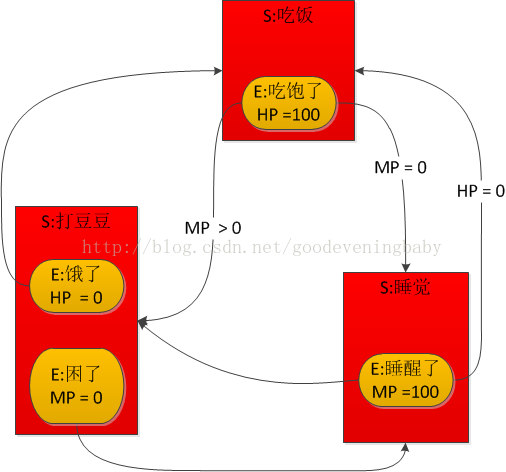
AI行为:吃饭 睡觉 打豆豆(很消耗体力和脑力的;)
1.打豆豆 HP -= 5 / 秒 MP -= 3 / 秒
2.吃饭 HP += 10/秒 MP -= 1 / 秒
3.睡觉 MP += 15/秒 HP -= 2/秒
4.吃饭和睡觉是不可打断的动作(pending),必须执行到吃饱(HP = 100) or 睡饱(MP = 100)
5.打豆豆是瞬发动作,每帧都可以执行一次
状态机的实现逻辑图:
行为树的实现逻辑图:
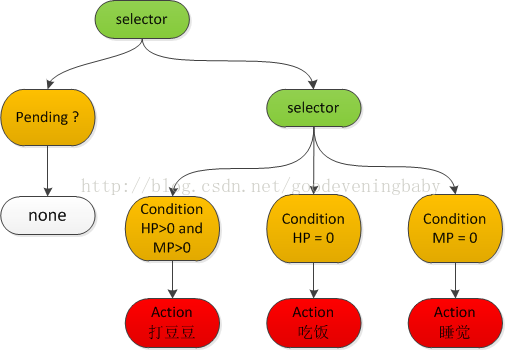
其实不管你知不知道什么是selector,condition都不要紧,至少从上图,应该可以看出来,行为树节点间的联系并不像状态机那样得“紧密”。
选择两种不同的ai实现方法,也决定了具体行为的实现逻辑。
比如对于sleep动作的实现,如果是状态机:
function sleep() =
if Y == 100 then
AwakeEvent()
return
end
HP -= X
MP += Y
end
然后每一帧执行sleep()
如果是选择行为树:
function sleep()
local sleepTime = (100/15)
–不好意思乱入了一段cocos2dx的代码
self:runAction(cc.Sequence:create(cc.DelayTime:create(sleepTime),cc.CallFunc:create(cancelPending)))
local cancelPending = function()
pending = false
end
end
罗列一下行为树的概念:
对于有限状态机而言,必须明确 状态的转换方式;对于行为树,必须明确状态前提:前提条件
每一个行为必须有“前提条件” ,这决定了该行为是否被选择。
行为树的运算也是通过帧循环的update来驱动,不一定是每帧都update,但是要周期性update。
每一次run从根节点(root)开始,每一运行都会选择一个可行的子节点运行,这种选择可以是随机方式,也可以是预设好优先条件
行为树由叶子节点和中间节点组成,叶子节点是最基本的行为(如跑动,攻击),中间节点代表逻辑单元(巡逻,逃跑)。
当一个叶子节点被选择后,就会激活其对应的基本的行为
最基本的行为可能执行成功也可能失败。
高等级的行为(中间节点)是否执行成功依赖于他们的孩子节点是否执行成功。
一个子节点失败可能导致父母节点选择另外一个孩子。
除了选择(selector)一个单独的子节点行为,一个节点还可能顺序(sequence)or并行(concurrent)得运行他的所有子节点。
一个行为除了有前提条件,可能还有上下文条件(父节点or孩子节点可能存储一定的状态变量)。
高优先级的行为可能抢占低优先级的行为
转载一段akara的行为树实现方案:
- Composite Node 组合节点
- Decorator Node 装饰节点
- Condition Node 条件节点
- Action Node 行为节点
各种节点的详细描述:
* Selector Node 选择节点
描述:从头到尾,按顺序选择第一个执行条件为真的子节点,遇到True停止。
处理流程:当执行本类型Node时,它将从begin到end迭代执行自己的Child Node:如遇到一个Child Node执行后返回True,那停止迭代,本Node向自己的Parent Node也返回True;否则所有Child Node都返回False,那本Node向自己的Parent Node返回False。
Sequence Node 序列节点
描述:从头到尾,按顺序执行每一个子节点,遇到False停止。
处理流程:当执行本类型Node时,它将从begin到end迭代执行自己的Child Node:如遇到一个Child Node执行后返回False,那停止迭代,本Node向自己的Parent Node也返回False;否则所有Child Node都返回True,那本Node向自己的Parent Node返回True。Parallel Node 并行节点
描述:从头到尾,平行执行它的所有子节点。
Parallel Selector Node: 有一个子节点True返回True,否则返回False。
Parallel Sequence Node: 有一个子节点False返回False,否则返回True。
Parallel Fall On All Node: 所有子节点False才返回False,否则返回True。
Parallel Succeed On All Node: 所有子节点True才返回True,否则返回False。
Parallel Hybird Node: 指定数量的子节点返回True或False后,才决定结果。Decorator Node 装饰节点
描述:装饰节点一般用来作为额外的附加条件。例如,时间间隔控制,次数控制,频率控制,结果取反,错误处理等。Condition Node 条件节点
描述:顾名思义,就是对应条件的节点。Action Node 行为节点
描述:顾名思义,就是用于完成某种动作的节点。
从代码实现的角度来谈下优缺点
优点:
1. 行为逻辑和状态数据分离,任何节点写好以后可以反复利用
2. 重用性高,可用通过重组不同的节点来实现不同的行为树
3. 呈线性的方式扩展,易于扩展
4. 可配置,把工作交给designer
5. 能够胜任”AI” “掉宝”等等场景。
缺点:
1. 每一帧都从root开始,有可能会访问到所以的节点,相对State Machine消耗更多的cpu
2. 任何一个简单的操作都必须要使用节点
















 902
902











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











