







上篇文章我们用手机上的蓝牙去控制智能小车,这次我们直接用笔记本上的蓝牙模块来控制小车,这样利用PC更为强大的运算能力,就可以扩展出更多有意思的功能来。
下面就是PC蓝牙模块的设置步骤(注意,需保证与小车相连的蓝牙模块上电)
1、 在控制面板中双击蓝牙图标

2、 蓝牙设备属性面板
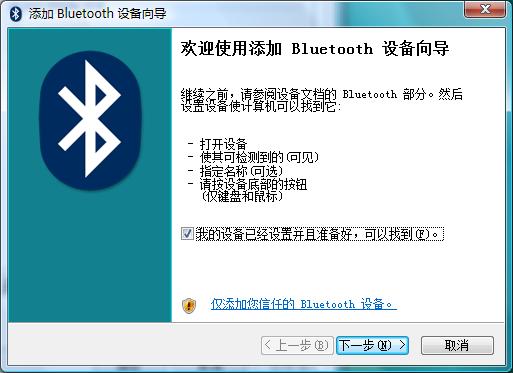
3、 添加蓝牙设备
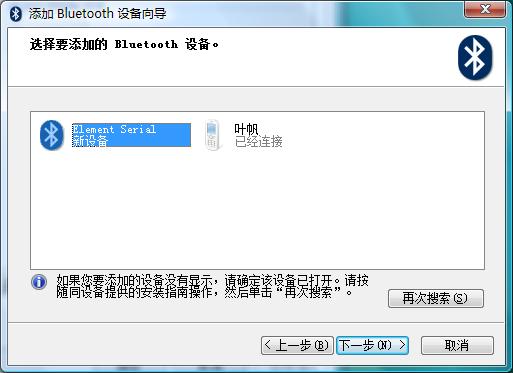
4、 找到蓝牙设备
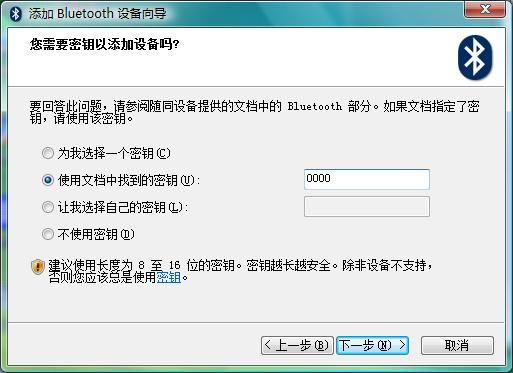
5、 设置密钥
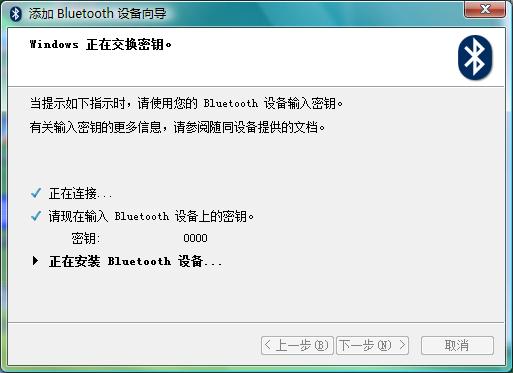
6、 设备安装
7、 安装成功
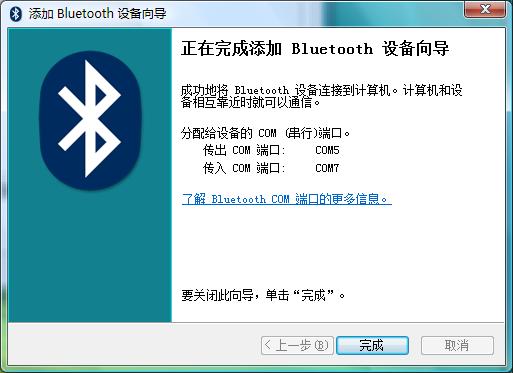
配置完成后,蓝牙通信就完全就变成了串口通信,所以相关的代码我这里就不重复介绍了,需要提醒的是,蓝牙模块要求的通信波特率为57600,且PC的通信串口为COM5,具体代码请参见《Zigbee遥控智能小车》和《蓝牙遥控智能小车(手机模式)》。
public frmMain()
{
InitializeComponent();
serial = new SerialPort("COM5", 57600, Parity.None, 8, StopBits.One);
serial.Open();
}
运行后的界面如下:

单击相关按钮,如果不出意外的话,在蓝牙通信范围的智能小车应该已经动起来了。
相关控制视频如下(和PC控制Zigbee的模式一致):
http://video.sina.com.cn/v/b/40292033-1804832611.html
(1)、小车底盘
http://item.taobao.com/item.htm?id=7218838776
(2)、四路直流电机驱动器
http://item.taobao.com/item.htm?id=7218717808
(3)、.NET Micro Framework开发板
http://item.taobao.com/item.htm?id=7117999726
(4)、蓝牙模块
http://item.taobao.com/auction/item_detail.htm?item_num_id=8333868680
注:需要红牛开发板固件在 V1.0.0以上
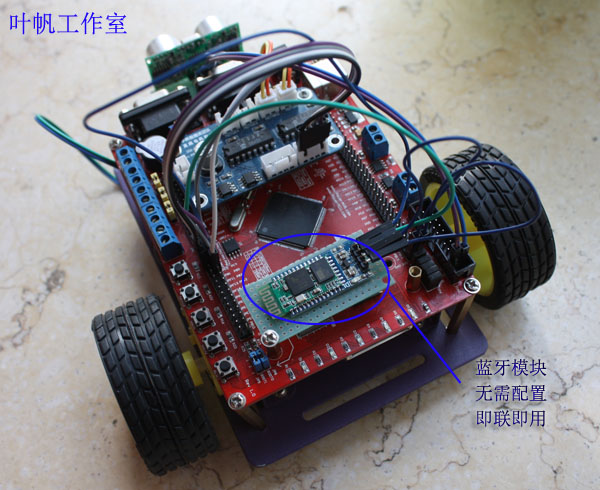
注:此蓝牙模块的通信波特率为9600,默认配对密码 1234,采用这款模块,记得把相关波特率由57600修改为9600。
本文源码:http://www.sky-walker.com.cn/yefan/MFV40/SourceCode/BluetoothCar.rar
本文源码:http://www.sky-walker.com.cn/yefan/MFV40/SourceCode/PCBluetooth.rar
MF快速参考: .NET Micro Framework 快速入门
MF中文讨论组:http://space.cnblogs.com/group/MFSoft/
微软官方论坛:MSDN微软中文技术论坛(.NET Micro Framework)
开发板简明手册:http://blog.sina.com.cn/s/blog_6b938f630100kh0k.html

















 5525
5525

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









