







【原文:http://blog.csdn.net/u012337034/article/details/38307219】
参考文献:
关于此类的详细信息和学术上的理论推导大家可以查看PaulJ. Besl的文章“A Method forRegistration of 3-D Shapes”。
小结:
ICP匹配,中文应该叫临近点迭代吧,是计算机图形学中的一个非常有用的算法,尤其是在三维重建点云配准中有着极其重要的地位,此外在SLAM等移动机器人导航等领域也有着很大的用武之地。
经过了十多年的发展ICP也有着很多的变种,今天我们首先熟悉下最基本的ICP匹配算法,PCL中的实现与参考文献中的一致,最终的变换矩阵都是基于SVD(奇异值分解)的。
在具体的实践中,一共有3个约束来终止迭代:
- 迭代次数,默认值为10;
- 上次转换与当前转换的差值;
- 前后两次迭代方差的差值。
当然我们还可以使用kdtree加速算法。
还有一点需要重点提示下,输入的点云需要经过预处理,过于复杂和过多噪声的点与将会出现“Invalid (NaN, Inf) point coordinates given to nearestKSearch!”的错误,比如我使用了官网教程中“楼梯的点云“。
不同版本的PCL函数命名可能不同,函数个数可能也不一样。
详细介绍:
参数输入输出:
此类由基类Registration派生,生成对象方式也很简单,如下:
Pcl:: IterativeClosestPoint<SourcePointTargetPoint> icp
成员函数:
这里我就不一一介绍所有的成员函数了,只是把几个非常重要的成员函数给列出来,并给出其的使用方法:
- inline void inline void setSearchMethodTarget(const KdTreePtr &tree) kdtree加速搜索,还有一个Target的函数,用法与之一致。
- inline void setInputSource (constPointCloudSourceConstPtr &cloud) 需要匹配的点云。
- inline void setInputTarget (constPointCloudTargetConstPtr &cloud) 基准点云,也就是从Source到Target的匹配。
- inline void setMaxCorrespondenceDistance (doubledistance_threshold) 忽略在此距离之外的点,如果两个点云距离较大,这个值要设的大一些(PCL默认距离单位是m)。
- inline void setTransformationEpsilon (doubleepsilon) 第2个约束,这个值一般设为1e-6或者更小。
- inline void setEuclideanFitnessEpsilon (doubleepsilon) 第3个约束,前后两次迭代误差的差值。
- inline void setMaximumIterations (intnr_iterations) 第1个约束,迭代次数,几十上百都可能出现。
- inline void align (PointCloudSource &output)输出配准后点云。
- inline Matrix4 getFinalTransformation () 获取最终的转换矩阵。
效果展示:
最近终于把PCL1.7.1搞定了,大家可以参考我的另一篇博客来安装,IDE为vs2010。我使用的是经典的斯坦福小兔子,源码和源点云文件我已上传到CSDN(
点此下载)。所需要的核心代码如下(我只是列出了部分需要设定参数的代码):
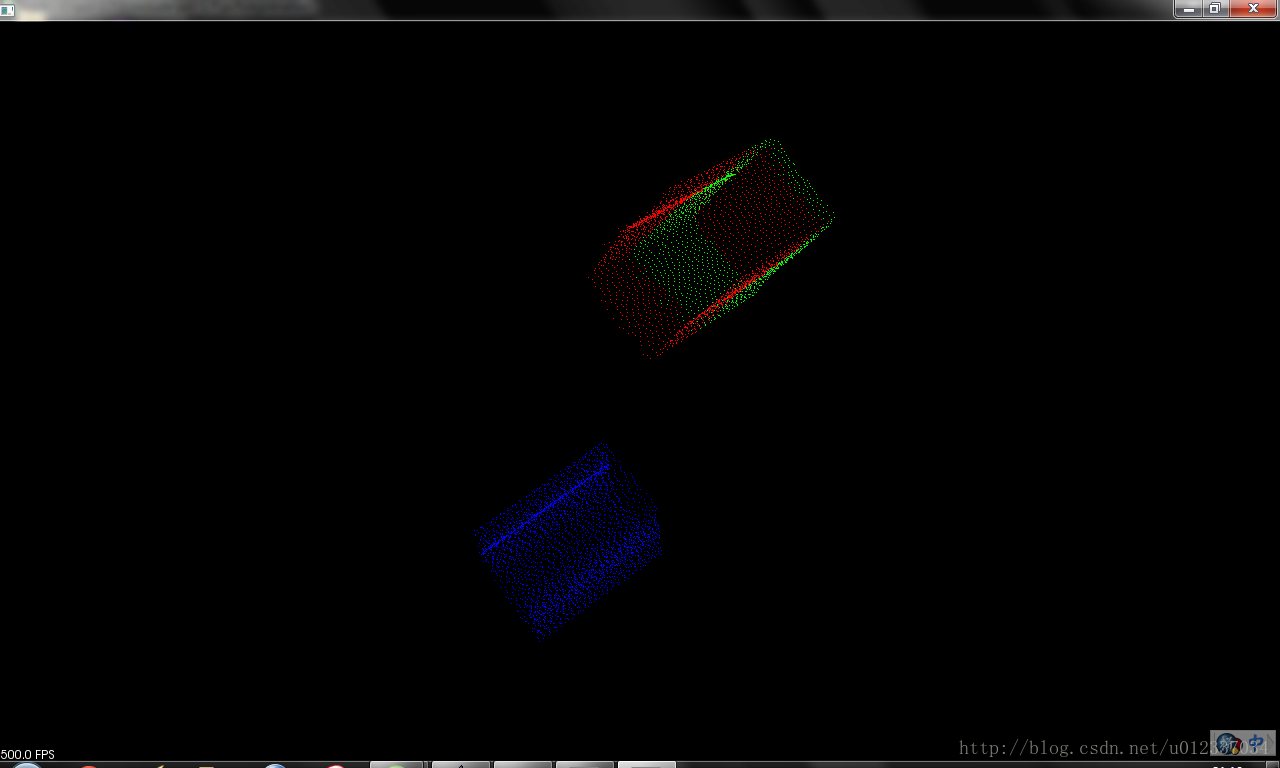
由上述代码片可知:一共有4个数据需要设定,这里我们修改不同的数据看下效果图(绿色为Target,蓝色为Source,红色为匹配后点云):

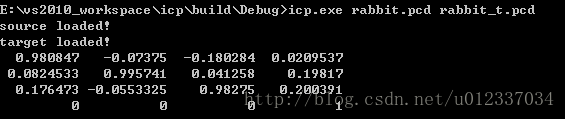
4个参数分别为:1.5,1e-10,0.1,100, 匹配的相当不好。
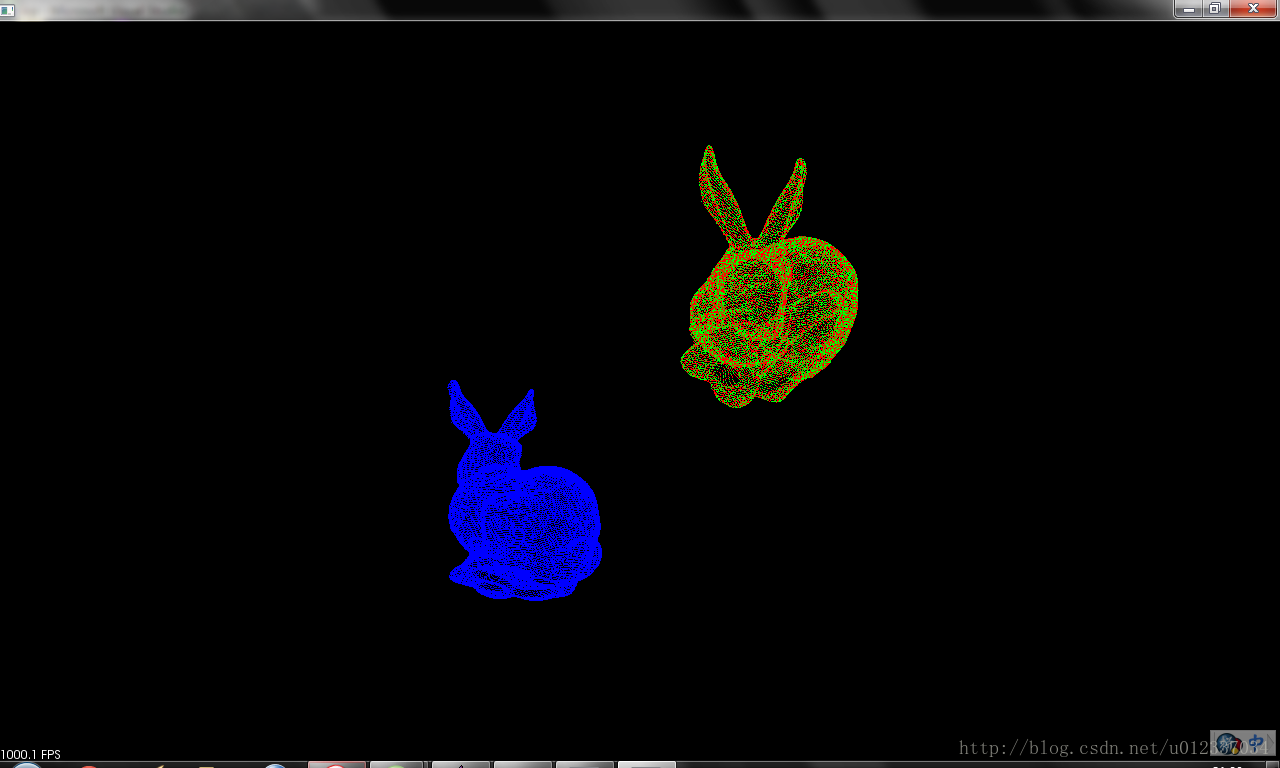
4个参数分别为:1.5,1e-10,0.01,100,完美重合。
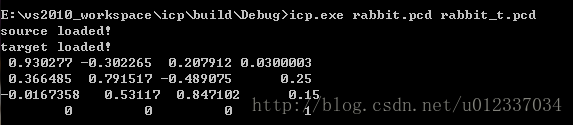
下面试一下我自己扫的小盒子。(单位mm,注意参数变化)。
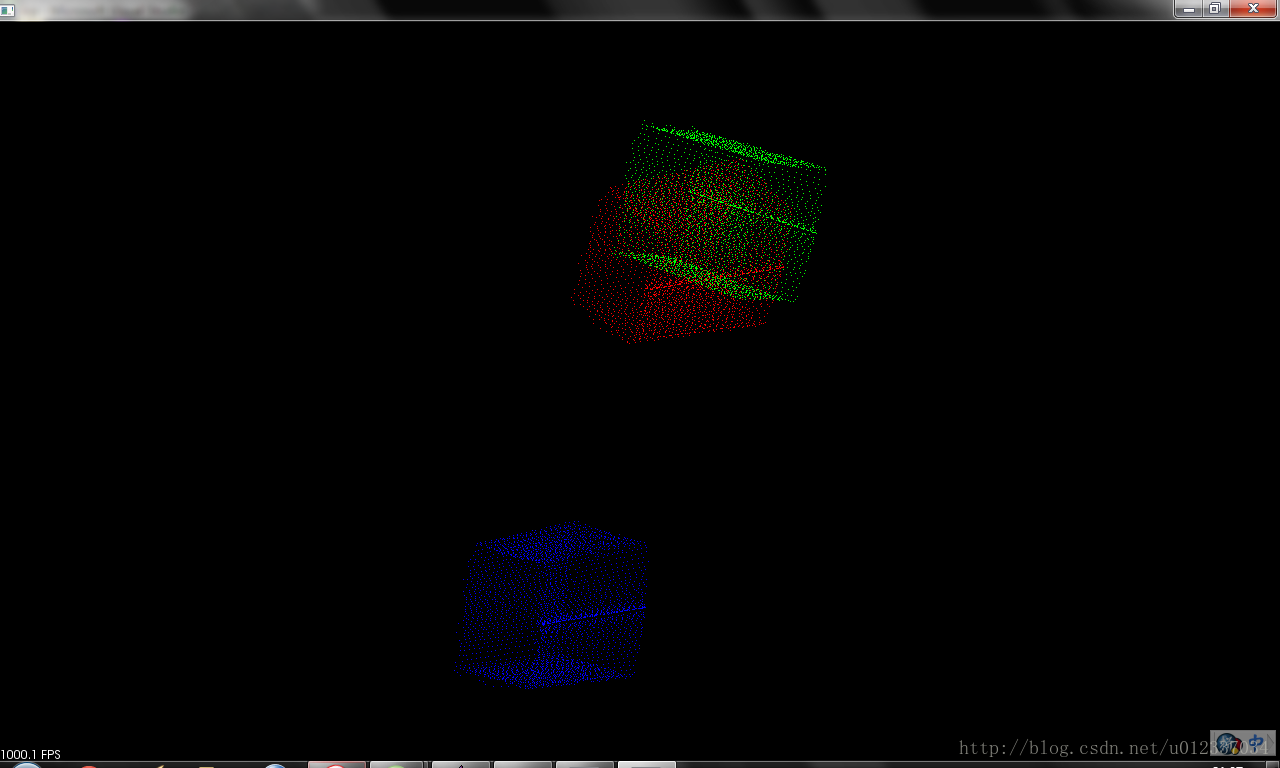
4个参数分别为:1500,1e-10,1,300, 匹配的相当不好。
4个参数分别为:1500,1e-10,0.1,300, 完美重合。
强烈建议大家使用CMake进行项目管理和使用最新版的PCL1.7.1。
对了我的邮箱为
littletinygo@sina.com
,我也是刚刚接触这个领域,希望与大家多多交流共同学习、共同进步。















 1188
1188

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









