







无人机吊运系统(二级摆)——几何建模
文章目录
前言
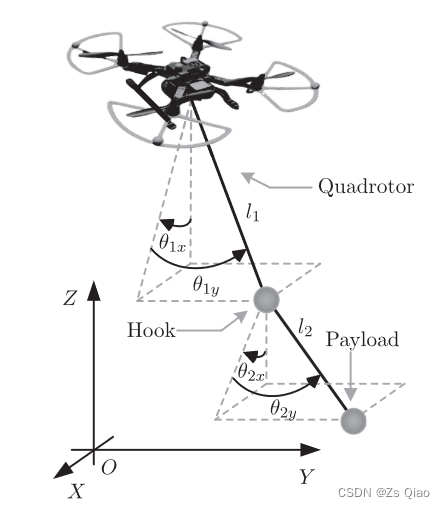
无人机(UAV)由于其高机动性、体积小等优势被广泛应用于吊运任务上,简化的吊运系统一般由无人机本体、轻质绳、重物组成,但实际上无人机吊运系统常常需要单独采用一挂钩另外悬挂重物,如图所示:
(图片来自网络,侵权请联系删除)
即由无人机本体悬挂吊钩(Hook),由吊钩悬挂重物(Payload),过去大部分关于无人机吊运系统的分析工作中,都将模型简化为单摆,但两级摆动实际会对无人机控制带来不小的影响(这在吊车的领域可以看到),为了后续进一步对无人机控制做分析,本文提出从几何角度对无人机吊运系统进行建模,其好处是模型结构相对简洁。
一、建模原理
拉格朗日法
定义系统拉格朗日量为:
L ( q , q ˙ ) = T ( q , q ˙ ) − V ( q ) L(q,\dot q) = T(q,\dot q) - V(q) L(q,q˙)=T(q,q˙)−V(q)
其中 q q q为系统广义坐标, T T T为系统总动能, V V V为系统总势能,则动力学方程可用拉格朗日函数表示如下:
f = d d t ∂ L ∂ q ˙ − ∂ L ∂ q f = \frac{d}{dt}\frac{\partial L}{\partial \dot q} -\frac{\partial L}{\partial q} f=dtd∂q˙∂L−∂q∂L
达朗贝尔原则(D’Alembert’s Principle)
对于一个质点系统,每一个质点的动力效应,即实际作用在质点上的力与质点的惯性力(虚拟的力,等于质点质量与加速度乘积的相反数)的矢量和,可以视为在任意虚位移上的总静力效应为零。
数学上表述为:
∑ ( F i − m i a i ) ⋅ ∂ r i = 0 \sum(\mathbf{F_i}-m_i\mathbf{a_i}) ·\partial \mathbf{r_i} = 0 ∑(Fi−miai)⋅∂ri=0
其中, F i \mathbf{F_i} Fi为作用在第 i i i个质点的实际力, m i m_i mi为第 i i i个质点的质量, a i \mathbf{a_i} ai为第 i i i个质点的加速度, ∂ r i \partial \mathbf{r_i} ∂ri是一个虚位移。
没有学过理论力学的同学可能不太好第一时间理解,其实达朗贝尔原则的优势在于他化解了面对处于运动状态的系统的受力分析,可以理解为将牛二定律升级为非惯性系下的表述。在拉格朗日力学中,达朗贝尔原则常用于导出拉格朗日方程,这是描述系统动态的基本方程。
二、使用步骤
变量定义:
- x Q 、 x h 、 x L \boldsymbol{x_Q}、 \boldsymbol{x_h}、 \boldsymbol{x_L} xQ、xh、xL分别为无人机位置、挂钩位置(hook)、负载位置(Load);
- l 1 、 l 2 l_1、l_2 l1、l2:吊绳1、2长度;
- p 1 、 p 2 \boldsymbol{p_1}、\boldsymbol{p_2} p1、p2:方向向量,分别代表由无人机质心指向挂钩、由挂钩指向负载;
- m Q 、 m h 、 m L m_Q、m_h、m_L mQ、mh、mL:分别为无人机质量、挂钩质量(hook)、负载质量(Load);
- g g g:重力加速度;
- L L L:拉格朗日量;
- T T T:系统总动能;
- V V V:系统总势能;
- R R R:无人机旋转矩阵;
1.系统能量
根据系统示意图,有:
x h = x L − l 2 p 2 x Q = x h − l 1 p 1 = x L − l 2 p 2 − l 1 p 1 T = 1 2 m Q v Q ⋅ v Q + 1 2 m h v h ⋅ v h + 1 2 m L v L ⋅ v L + 1 2 Ω ⊤ J Ω V = m Q g e 3 ⋅ x Q + m h g e 3 ⋅ x h + m L g e 3 ⋅ x L ∴ L = T − V = 1 2 m Q ( x ˙ L − L 1 p ˙ 1 − l 2 p ˙ 2 ) ⋅ ( x ˙ L − l 1 p 1 − L 2 p ˙ 2 ) + 1 2 m h ( x ˙ L − L 2 p ˙ 2 ) ⋅ ( x ˙ L − L 1 p ˙ 2 ) + 1 2 m L x ˙ L ⋅ x ˙ L + 1 2 Ω ⊤ J Ω − m Q g e 3 ⋅ ( x L − L 1 p 1 − l 2 p 2 ) − m h g e 3 ⋅ ( x L − L 2 p 2 ) − m L g e 3 ⋅ x L \begin{aligned} \boldsymbol{x_h}&=\boldsymbol{x_L}-l_2\boldsymbol{p_2} \\ \boldsymbol{x_Q}&=\boldsymbol{x_h}-l_1\boldsymbol{p_1}=\boldsymbol{x_L}-l_2 \boldsymbol{p_2}-l_1\boldsymbol{p_1} \\ T&= \frac{1}{2} m_Q \boldsymbol{v_Q} \cdot \boldsymbol{v_Q}+\frac{1}{2} m_h \boldsymbol{v_h} \cdot \boldsymbol{v_h}+\frac{1}{2} m_L \boldsymbol{v_L} \cdot \boldsymbol{v_L}+\frac{1}{2} \Omega^{\top} J \Omega \\ V&= m_Q g \boldsymbol{e_3} \cdot \boldsymbol{x_Q}+m_h g \boldsymbol{e_3} \cdot \boldsymbol{x_h}+m_L g \boldsymbol{e_3}\cdot \boldsymbol{x_L} \\ \therefore L&= T-V \\ &= \frac{1}{2} m_Q\left(\dot{\boldsymbol{x}}_L-L_1 \dot{\boldsymbol{p}}_1-l_2 \dot{\boldsymbol{p}}_2\right) \cdot\left(\dot{\boldsymbol{x}}_L-l_1 p_1-L_2 \dot{\boldsymbol{p}}_2\right)+\frac{1}{2} m_h\left(\dot{\boldsymbol{x}}_L-L_2 \dot{\boldsymbol{p}}_2\right) \cdot\left(\dot{\boldsymbol{x}}_L-L_1 \dot{\boldsymbol{p}}_2\right) \\ & +\frac{1}{2} m_L \dot{\boldsymbol{x}}_L \cdot \dot{\boldsymbol{x}}_L+\frac{1}{2} \Omega^{\top} J \Omega \\ & -m_Q g \boldsymbol{e_3} \cdot\left(\boldsymbol{x_L}-L_1\boldsymbol{p_1}-l_2 \boldsymbol{p_2}\right)-m_h g \boldsymbol{e_3} \cdot\left(\boldsymbol{x_L}-L_2 \boldsymbol{p_2}\right)-m_L g \boldsymbol{e_3} \cdot \boldsymbol{x_L} \end{aligned} xhxQTV∴L=xL−l2p2=xh−l1p1=xL−l2p2−l1p1=21mQvQ⋅vQ+21mhvh⋅vh+21mLvL⋅vL+21Ω⊤JΩ=mQge3⋅xQ+mhge3⋅xh+mLge3⋅xL=T−V=21mQ(x˙L−L1p˙1−l2p˙2)⋅(x˙L−l1p1−L2p˙2)+21mh(x˙L−L2p˙2)⋅(x˙L−L1p˙2)+21mLx˙L⋅x˙L+21Ω⊤JΩ−mQge3⋅(xL−L1p1−l2p2)−mhge3⋅(xL−L2p2)−mLge3⋅xL
由此构建好二级摆系统的拉格朗日量。
注意:由于无人机姿态在这里与负载动力学解耦,为了主要展现二级摆部分几何建模,后将无人机本体旋转部分能量忽略。
2.建模
准备好拉格朗日方程需要的偏导量:
∂ L ∂ x L = − ( m Q + m h + m L ) g e 3 d d t ∂ L ∂ x ˙ 2 = m Q ( x ¨ L − l 1 p ¨ 1 − l 1 p ¨ 2 ) + m h ( x ¨ L − l 2 p ¨ 2 ) + m L x ¨ L ∂ L ∂ p 1 = − m Q g e 3 l 1 d d t ∂ L ∂ p ˙ 1 = − m Q l 1 ( x ¨ L − l 1 p ¨ 1 − l 2 p ¨ 2 ) ∂ L ∂ p 2 = − m Q g e 3 l 2 − m h g e 3 l 2 d d t ∂ L ∂ p 2 = − m Q l 2 ( x ¨ L − l 1 p ¨ 1 − l 2 p ¨ 2 ) − m h l 2 ( x ¨ L − l 2 p ¨ 2 ) \begin{aligned} \frac{\partial L}{\partial \boldsymbol{x_L}}=&-\left(m_Q+m_h+m_L\right) g \boldsymbol{e_3} \\ \frac{d}{d t} \frac{\partial L}{\partial \dot{\boldsymbol{x}}_2}=&m_Q\left(\ddot{\boldsymbol{x}}_L-l_1 \ddot{\boldsymbol{p}}_1-l_1 \ddot{\boldsymbol{p}}_2\right)+m_h\left(\ddot{\boldsymbol{x}}_L-l_2 \ddot{\boldsymbol{p}}_2\right)+m_L \ddot{\boldsymbol{x}}_L \\ \frac{\partial L}{\partial \boldsymbol{p}_1}=&-m_Q g\boldsymbol{e_3} l_1 \\ \frac{d}{d t} \frac{\partial L}{\partial \dot{\boldsymbol{p}}_1}=&-m_Q l_1\left(\ddot{\boldsymbol{x}}_L-l_1 \ddot{\boldsymbol{p}}_1-l_2 \ddot{\boldsymbol{p}}_2\right) \\ \frac{\partial L}{\partial \boldsymbol{p}_2}=&-m_Q g \boldsymbol{e_3}l_2-m_h g \boldsymbol{e_3} l_2 \\ \frac{d}{d t} \frac{\partial L}{\partial \boldsymbol{p}_2}=&-m_Q l_2\left(\ddot{\boldsymbol{x}}_L-l_1 \ddot{\boldsymbol{p}}_1-l_2 \ddot{\boldsymbol{p}}_2\right)-m_h l_2\left(\ddot{\boldsymbol{x}}_L-l_2 \ddot{\boldsymbol{p}}_2\right) \\ \end{aligned} ∂xL∂L=dtd∂x˙2∂L=∂p1∂L=dtd∂p˙1∂L=∂p2∂L=dtd∂p2∂L
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 4553
4553

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









