






因果机器学习作为AI领域的前沿研究方向,将因果逻辑与数据驱动模型深度融合,从根本上突破了传统机器学习的局限性。这一领域的研究不仅在当下备受关注,而且在未来几年仍将是热点。
今年,学者在因果机器学习方面的创新主要集中在动态建模、高维数据处理、无监督学习以及跨领域应用等方面。例如,结合深度学习与稀疏因果图,开发了轻量化的混杂控制方法,既具有理论深度,又具备实际应用价值。此外,还需关注顶会顶刊中的最新工作,并结合具体领域(如医疗)展开研究,确保研究方向始终处于行业前沿。
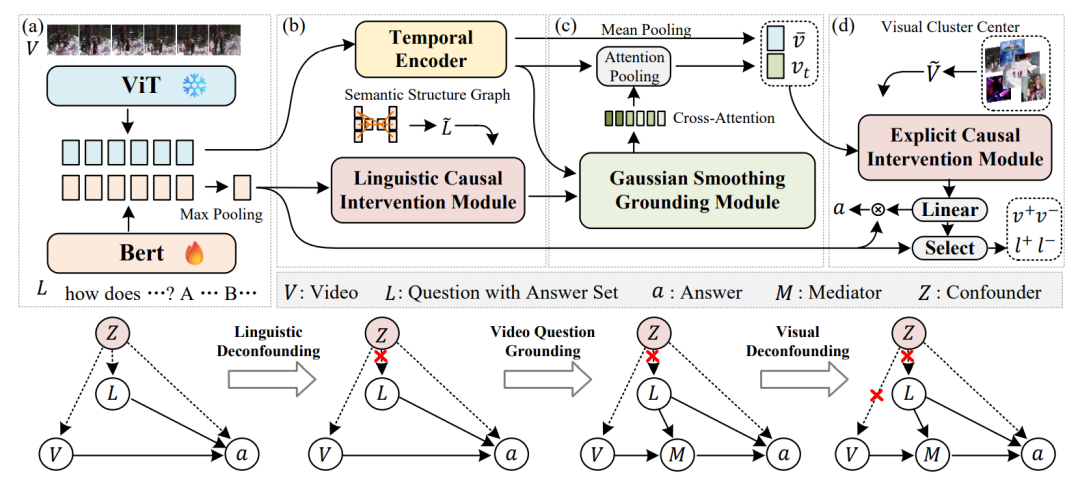
Cross-modal Causal Relation Alignment for Video Question Grounding(CVPR 2025)
方法:文章首先利用预训练的CLIP模型提取视频特征,并通过RoBERTa模型编码问题和答案对的语言特征。然后,通过高斯平滑定位模块估计与问题相关的视频时间区间,并利用双向跨模态对齐模块对视频特征和问答特征进行对齐。最后,通过显式因果干预模块对视觉和语言模态进行去混杂处理,从而实现更准确的视频问题定位和因果一致的问答。
创新点:
-
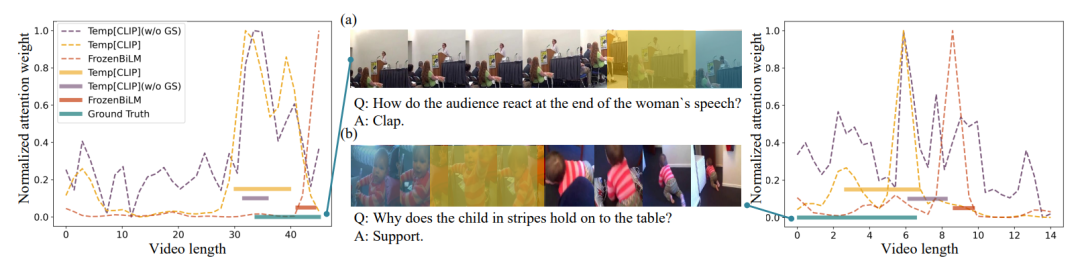
提出了高斯平滑定位(Gaussian Smoothing Grounding, GSG)模块,通过自适应高斯滤波对交叉模态注意力进行去噪,从而更准确地估计视频时间区间。
-
引入了双向跨模态对齐(Cross-Modal Alignment, CMA)模块,利用对比学习增强弱监督视频问题定位的性能,无需额外标注即可实现视频特征与问答特征的精准对齐。
-
设计了显式因果干预(Explicit Causal Intervention, ECI)模块,通过视觉的前门干预和语言的后门干预,有效消除虚假相关性,提升问答与视频时间定位之间的因果一致性。
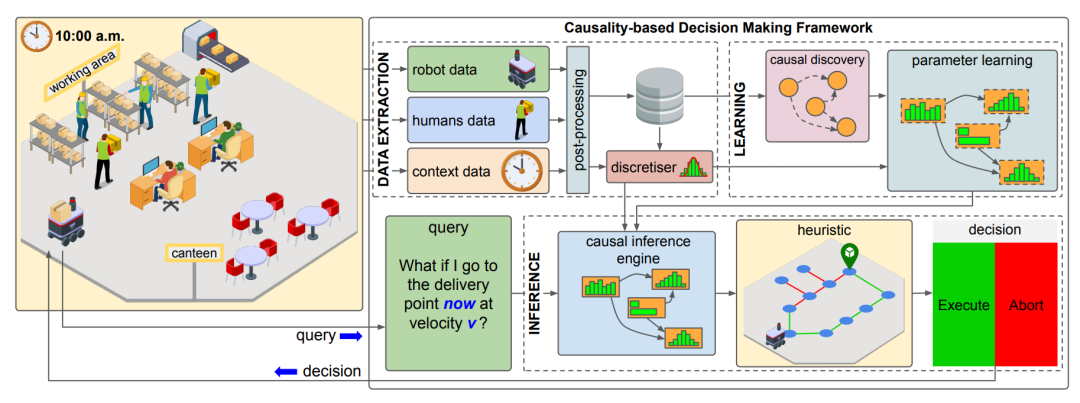
Causality-enhanced Decision-Making for Autonomous Mobile Robots in Dynamic Environments
方法:文章首先通过数据提取模块收集机器人、人类和上下文因素的相关信息,然后利用因果发现算法构建因果模型,并通过参数学习模块估计模型参数。最后,通过推理模块,机器人能够基于因果推理引擎进行决策,选择最优路径并决定是否执行任务。
创新点:
-
提出了一个新颖的因果推断框架,用于机器人决策,能够预测电池使用和人类阻碍,从而优化任务执行效率。
-
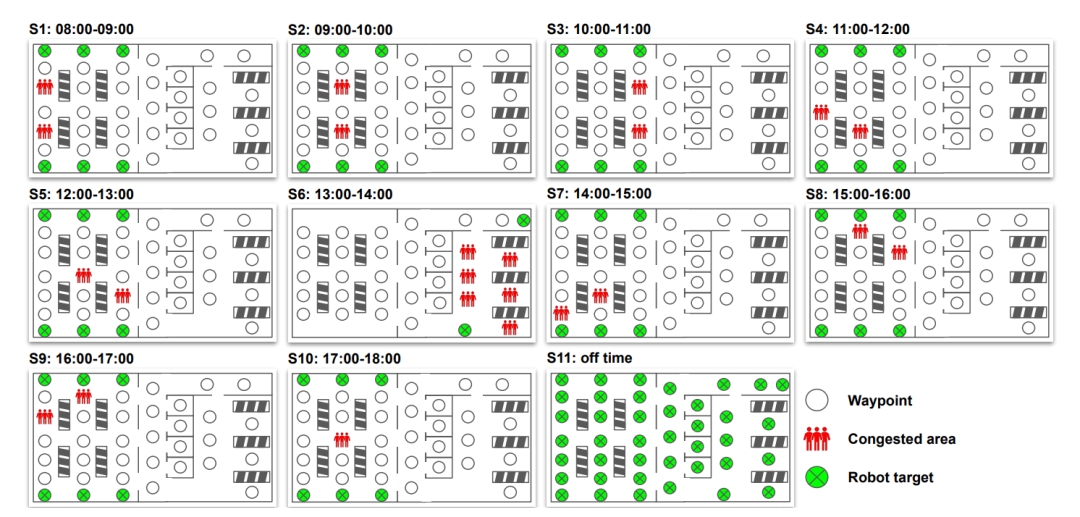
开发了PeopleFlow,这是一个基于Gazebo的新模拟器,能够模拟人类和机器人在共享工作空间中的复杂空间交互行为,考虑了时间、环境布局和机器人状态等上下文因素。
-
在模拟的仓库环境中进行了广泛的实验评估,证明了因果方法在效率和安全性方面的优势,为实际机器人应用提供了有力支持。
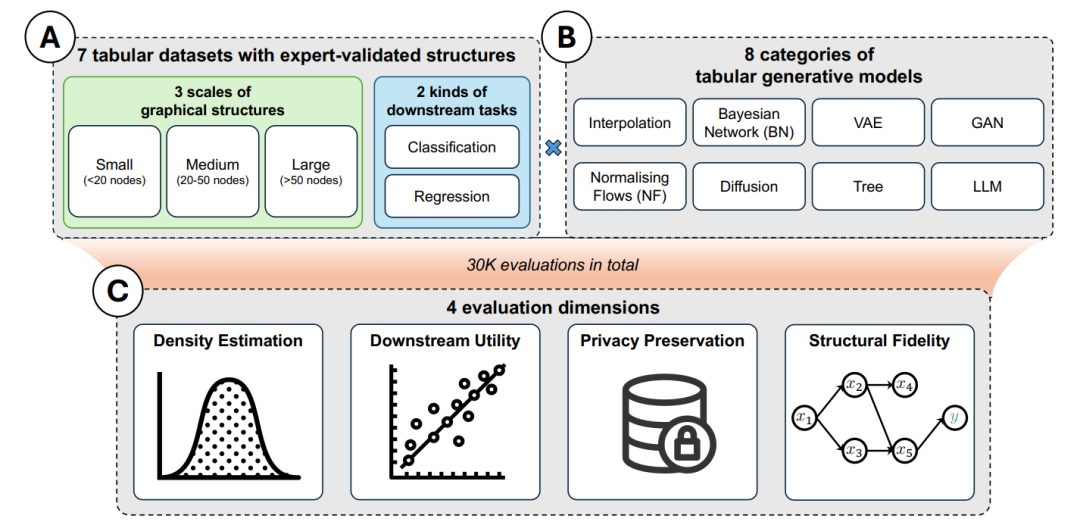
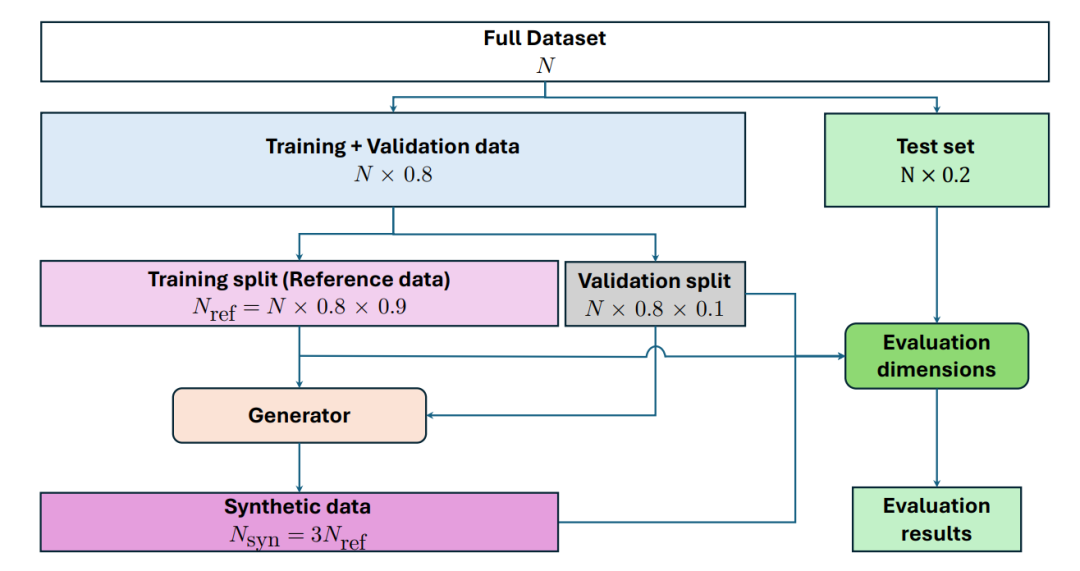
How Well Does Your Tabular Generator Learn the Structure of Tabular Data?(ICLR 2025)
方法:文章首先构建了一个包含真实因果结构的数据集,用于训练表格生成模型并生成合成数据。然后,通过量化真实数据和合成数据之间的条件独立性关系来评估结构保真度,并将其细分为全局独立性和局部独立性两个指标。最后,结合传统的评估维度(如密度估计、下游效用和隐私保护)进行综合评估,以全面衡量表格生成模型的性能。
创新点:
-
提出了TabStruct框架,将结构保真度作为核心评估维度,通过比较真实数据和合成数据之间的因果结构对齐程度,直接衡量表格生成模型对表格数据结构的学习效果。
-
在评估中纳入了八类生成器,并在七个具有专家验证因果图结构的数据集上进行了广泛的实验,提供了任务无关、领域无关的评估维度,为表格生成模型的开发提供了实际指导。
-
除了结构保真度外,还保留了传统的评估指标,并研究了它们与结构保真度之间的相互作用,为研究人员和从业者提供了一个标准化的评估框架。


















 905
905

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









