







概要
科技文明发展会推动人类社会历史的进步,21世纪是一个“人工智能”的时代,科技产物在发展人工智能满足当下需求外,也为未来的社会发展做出重要的铺垫作用,制造的机器人也被注入了“智能”的元素,使得机器具有像人一样的“学习”能力,这也意味着机器人的多功能性、高效稳定性和可互动性。同时期的科技产物还有“物联网”技术,物联网与机器的结合产物,在军工业、制造业、农业、服务业等等领域有着应用,也有着相应的技术要求。本次课题设计结合了当今社会的网络应用“物联网”技术,主要以机器对象为主,网络技术为辅作为研究目的,二者通过ESP8266模块生成的Web服务器连接,以此作为上位机和下位机的连接桥梁,通过接收控制端的指令输入来控制物体对象,在完成相应的控制运动研究后,加入了超声波避障模块来实现“智能”化,即智能避障,从而实现设计的过程和目的。
关键词:人工智能 四足机器人 物联网 ESP8266
一、四足机器人的实现原理及硬件设计
2.1 四足机器人的相关技术分析
2.1.1需求分析
本设计要求采用ESP8266串口WiFi模块进行指令编译和接收,要求通信模块与网络模块连接成功,机器人才能接收命令指令,经过MCU处理,再通过PWM Servo舵机驱动板模块PCA9685来调节舵机转动的角度值,从而完成预定或指定的动作,比如前进后退,左右移动和左右平移等等,最后环节再加上一个超声波避障。
2.1.2系统实现框架
为实现上述功能需求,如图2.1所示系统框架图,在移动操作端进行指令的输入,通过无线局域网WiFi模块的接收,经过MCU处理指令信息,从而驱动PWMservo的输出来控制各个舵机的转动的幅度值。
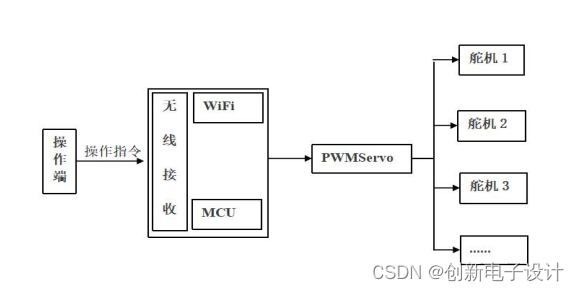
图2.1系统框架图
2.1.3实现原理分析
本次设计的四足机器人使用8个舵机,每2个舵机组成一个运动的肢足,运动的方式是靠舵机接收PWM信号来对相应的肢足进行运动控制,而每个肢足它组成的2个舵机PWM信号值进行配合变成相应的运动状态,根据要求的运动姿势来发送PWM信号给各个肢足,从而实现一个完整的运动控制。四足机器人的前后运动,左右运动及左右平移运动会在第五章整体测试与调试中进行详细的解析。
2.2 硬件系统概述
一个现代制造的机器的运转缺少不了硬件和软件,但每一个机器组成成分最多的就是硬件,硬件及外辅助支架的组成相当于机器的器官和骨架,它可以提供强劲有力、高效稳定的运转条件,此次关于四足机器人的设计也是如此。
2.3 系统结构设计
2.3.1 系统各模块结构概述
(1)结构支架
有可选方案如下:
1.塑料3D打印支架结构。
2.椴木支架结构。
对比两种支架材料,虽然塑料的3D打印支架具有良好的实用性、稳定性和观赏性,自己没有相关的3D打印设备,而且价格较高。反观普通的椴木板。即使椴木支架易松动损坏,但也可以提供短期的稳定效果,又考虑到设计成本及现有设备材料,以及设计实验的初衷,决定用椴木作为结构支架。
(2)MCU控制端模块
由于此次四足机器人的设计采用的是ESP8266WiFi模块,局域网的无线连接,它支持手机、平板、电脑的连接控制,在很大方面展示了物联网的控制平台兼容性,相比电脑和平板,为方便此次设计,采用了移动手机作为操作控制端。
(3)电源模块
能源是每一个机器运转的前提条件,此次设计可用5.0V-12.0V电源作为动力
二、系统实现
四、效果图

五、 文章目录
目录
第一章 绪论…1
1.1课题研究背景和意义…1
1.2国内外研究现状…1
1.3论文研究内容与设计目标…2
1.4论文结构安排…2
1.5本章小结…3
第二章 四足机器人的实现原理及硬件设计…4
2.1四足机器人的相关技术分析…4
2.1.1需求分析…4
2.1.2系统实现框架…4
2.1.3实现原理分析…4
2.2硬件系统概述…4
2.3系统结构设计…5
2.3.1系统各模块结构概述…5
2.3.2结构支架设计…8
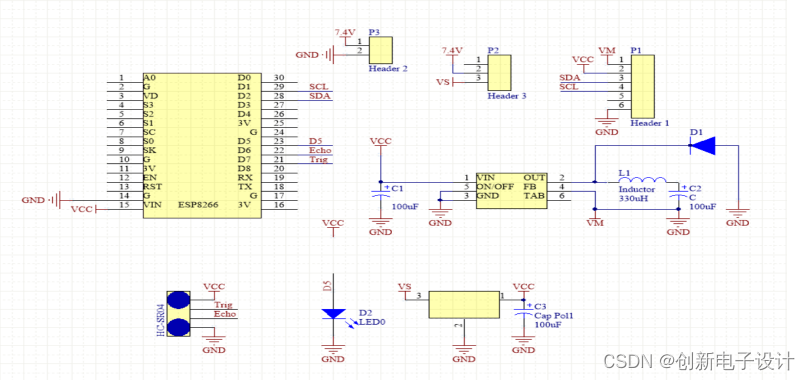
2.3.3系统电路原理图…9
2.3本章小结…10
第三章 软件设计与实现…11
3.1软件概述…11
3.1.1软件开发平台…11
3.1.2开发环境的配置…12
3.1.3 Web网络控制端连接…14
3.1.4软件结构设计…15
3.2本章小结…15
第四章 四足机器人的基础步态测试与调试…16
4.1系统功能测试…16
4.1.1检测元器件…16
4.1.2整体运行检测调试…17
4.2四足机器人的稳定性测试…26
4.3本章小结…27
第五章 超声波避障设计及有关故障分析…28
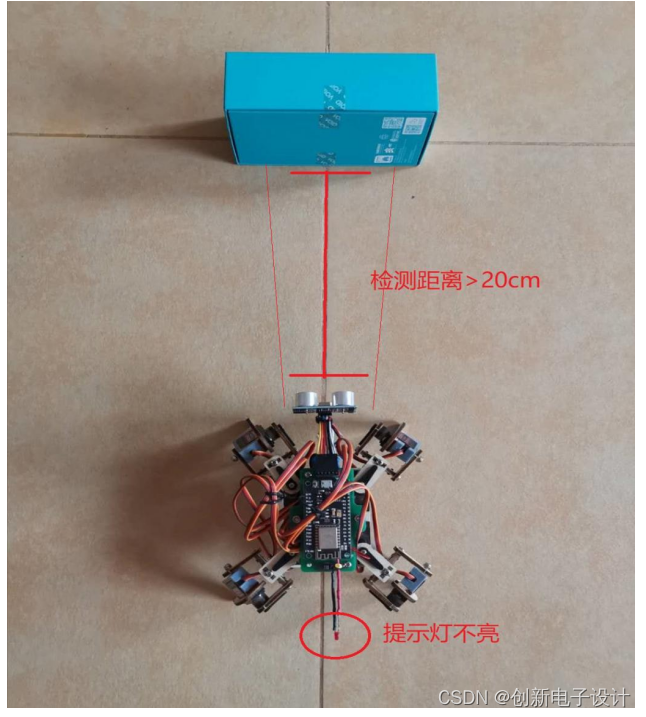
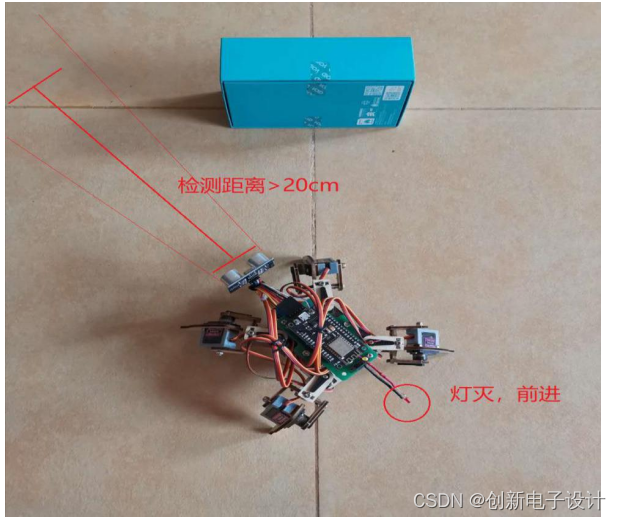
5.1超声波模块避障功能测试…28
5.2故障分析及解决方案…29
5.3可预加模块及开发应用…30
5.3.1人工智能机器学习模块…30
5.3.2环境检测模块及云台应用…30
5.3.3关于四足机器人的“机械臂-轮子”结合应用…30
5.3.4关于水陆两用机器人的理论开发和应用…30
5.4本章小结…30
总结…33
致谢…34
参考文献…35

















 459
459

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









