






offboard代码部分
官方提供源码
https://docs.px4.io/main/zh/ros/mavros_offboard_cpp.html
配置步骤
先建立工作空间,功能包,然后编写offboard_node文件
mkdir H_ws/src
cd H_ws/src
catkin_create_pkg offboard_nodes rospy roscpp std_msgs
cd offboard_nodes/src
gedit offboard_node.cpp
官方代码演示
#include <ros/ros.h>
#include <geometry_msgs/PoseStamped.h>
#include <mavros_msgs/CommandBool.h>
#include <mavros_msgs/SetMode.h>
#include <mavros_msgs/State.h>
//建立一个订阅消息体类型的变量
mavros_msgs::State current_state;
//订阅时的回调函数
void state_cb(const mavros_msgs::State::ConstPtr& msg){
current_state = *msg;
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "offb_node"); //ros初始化,最后一个参数为节点名称
ros::NodeHandle nh;
//订阅。<>里面为模板参数,传入的是订阅的消息体类型,()里面传入三个参数,分别是该消息体的位置、缓存大小(通常为10)、回调函数
ros::Subscriber state_sub = nh.subscribe<mavros_msgs::State>("mavros/state", 10, state_cb);
ros::Publisher local_pos_pub = nh.advertise<geometry_msgs::PoseStamped>("mavros/setpoint_position/local", 10);//控制话题,用于发布位置信息
//启动服务1,设置客户端(Client)名称为arming_client,客户端的类型为ros::ServiceClient,用于请求解锁无人机
ros::ServiceClient arming_client = nh.serviceClient<mavros_msgs::CommandBool>("mavros/cmd/arming");
//启动服务2,设置客户端(Client)名称为set_mode_client,客户端的类型为ros::ServiceClient,用于请求切换无人机模式
ros::ServiceClient set_mode_client = nh.serviceClient<mavros_msgs::SetMode>("mavros/set_mode");
//发布频率
ros::Rate rate(20.0);
// 等待飞控连接mavros,current_state是我们订阅的mavros的状态,连接成功在跳出循环
while(ros::ok() && !current_state.connected){
ros::spinOnce();
rate.sleep();
}
//先实例化一个geometry_msgs::PoseStamped类型的对象,并对其赋值,最后将其发布出去
geometry_msgs::PoseStamped pose;
pose.pose.position.x = 0;
pose.pose.position.y = 0;
pose.pose.position.z = 2; //控制飞到z=2米处
//启动之前发送一些设定值
for(int i = 100; ros::ok() && i > 0; --i){
local_pos_pub.publish(pose);
ros::spinOnce();
rate.sleep();
}
//建立一个类型为SetMode的服务端offb_set_mode,并将其中的模式mode设为"OFFBOARD",作用便是用于后面的客户端与服务端之间的通信(服务)
mavros_msgs::SetMode offb_set_mode;
offb_set_mode.request.custom_mode = "OFFBOARD";
//建立一个类型为CommandBool的服务端arm_cmd,并将其中的是否解锁设为"true",作用便是用于后面的客户端与服务端之间的通信(服务)
mavros_msgs::CommandBool arm_cmd;
arm_cmd.request.value = true;
//更新时间
ros::Time last_request = ros::Time::now();
while(ros::ok())//进入大循环
{
//首先判断当前模式是否为offboard模式,如果不是,则客户端set_mode_client向服务端offb_set_mode发起请求call
if( current_state.mode != "OFFBOARD" && (ros::Time::now() - last_request > ros::Duration(5.0)))
{
if( set_mode_client.call(offb_set_mode) && offb_set_mode.response.mode_sent)
{
ROS_INFO("Offboard enabled");//打开模式后打印信息
}
last_request = ros::Time::now();
}
else //else指已经为offboard模式,然后进去判断是否解锁,如果没有解锁,则客户端arming_client向服务端arm_cmd发起请求call
{
if( !current_state.armed && (ros::Time::now() - last_request > ros::Duration(5.0)))
{
if( arming_client.call(arm_cmd) && arm_cmd.response.success)
{
ROS_INFO("UAV is arming");//解锁后打印信息
}
last_request = ros::Time::now();
}
}
local_pos_pub.publish(pose); //发布位置信息,所以综上飞机只有先打开offboard模式然后解锁才能飞起来
ros::spinOnce();
rate.sleep();
}
return 0;
}保存后关闭,打开CMakeLists.txt,添加
add_executable(offboard_node src/offboard_node.cpp)
target_link_libraries(offboard_node
${catkin_LIBRARIES}
)我习惯在最末尾添加,也可以在build内直接复制添加
退回H_ws目录,开始编译
catkin_make
开启gazebo
另起终端输入
roslaunch px4 mavros_posix_sitl.launch #仿真通信一体化,可以直接建立通信打开地面站QGC会显示已经连接上飞行器
在H_ws目录下输入
source devel/setup.bash #为该终端添加环境变量
rosrun offboard_nodes offboard_node #运行ros节点等待无人机切换offboard模式,自动解锁
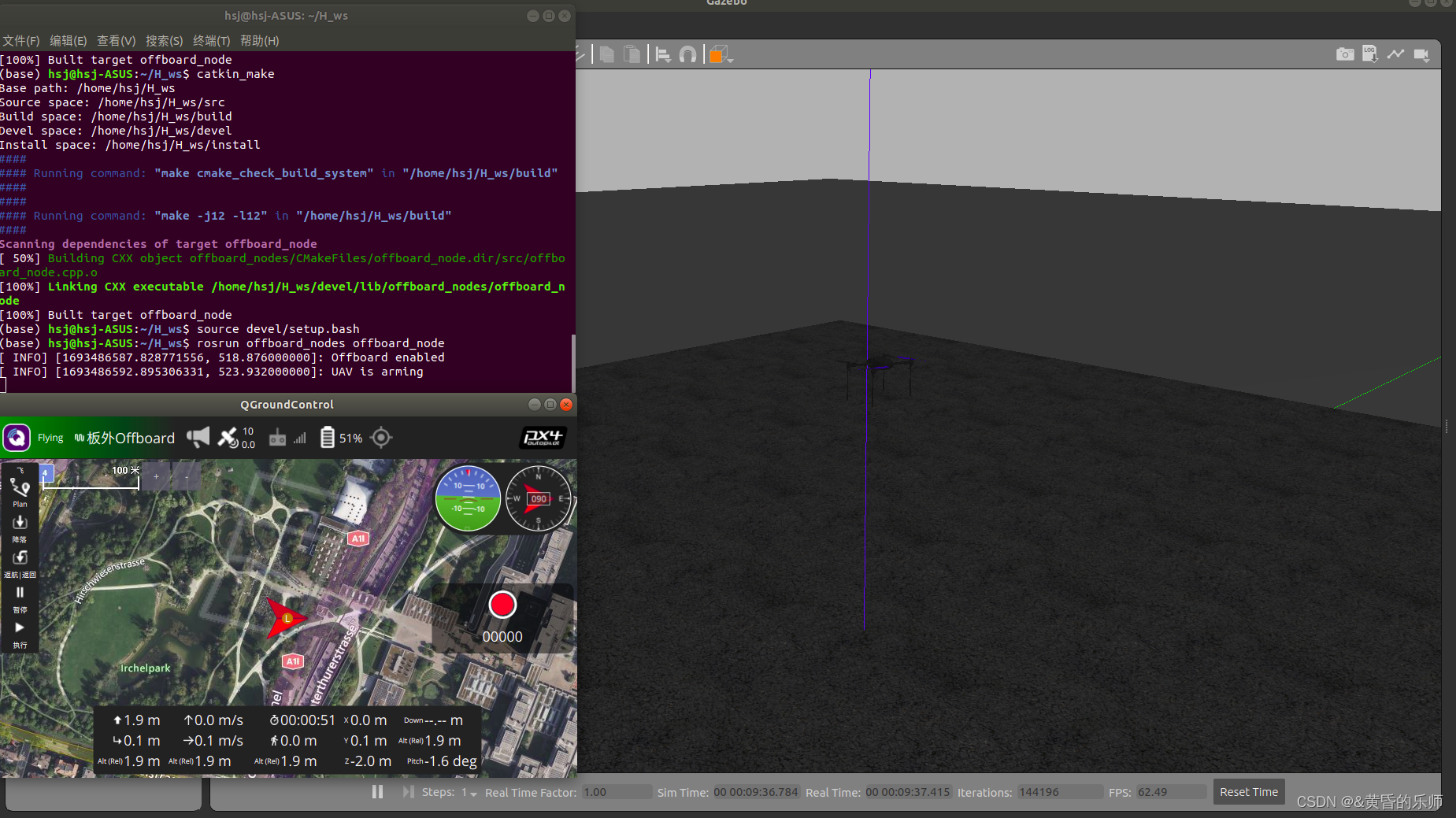
飞机起飞到2米高处
自己写轨迹
新创建一个offboard文件 offboard_node1.cpp
#include <ros/ros.h>
#include <geometry_msgs/PoseStamped.h> //添加的位置信息话题与控制话题消息类型一致,所以不用添加头文件
#include <mavros_msgs/CommandBool.h>
#include <mavros_msgs/SetMode.h>
#include <mavros_msgs/State.h>
mavros_msgs::State current_state;
void state_cb(const mavros_msgs::State::ConstPtr& msg){
current_state = *msg;
}
// 订阅的无人机当前位置数据
geometry_msgs::PoseStamped local_pos;
void local_pos_cb(const geometry_msgs::PoseStamped::ConstPtr &msg)
{
local_pos = *msg;
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "offb_node"); //ros初始化,最后一个参数为节点名称
ros::NodeHandle nh;
//订阅。<>里面为模板参数,传入的是订阅的消息体类型,()里面传入三个参数,分别是该消息体的位置、缓存大小(通常为10)、回调函数
ros::Subscriber state_sub = nh.subscribe<mavros_msgs::State>("mavros/state", 10, state_cb);
ros::Subscriber local_pos_sub = nh.subscribe<geometry_msgs::PoseStamped>("mavros/local_position/pose", 10, local_pos_cb);//订阅位置信息
ros::Publisher local_pos_pub = nh.advertise<geometry_msgs::PoseStamped>("mavros/setpoint_position/local", 10);//控制话题,用于发布位置信息
//启动服务1,设置客户端(Client)名称为arming_client,客户端的类型为ros::ServiceClient,用于请求解锁无人机
ros::ServiceClient arming_client = nh.serviceClient<mavros_msgs::CommandBool>("mavros/cmd/arming");
//启动服务2,设置客户端(Client)名称为set_mode_client,客户端的类型为ros::ServiceClient,用于请求切换无人机模式
ros::ServiceClient set_mode_client = nh.serviceClient<mavros_msgs::SetMode>("mavros/set_mode");
//发布频率
ros::Rate rate(20.0);
// 等待飞控连接mavros,current_state是我们订阅的mavros的状态,连接成功在跳出循环
while(ros::ok() && !current_state.connected){
ros::spinOnce();
rate.sleep();
}
//先实例化一个geometry_msgs::PoseStamped类型的对象,并对其赋值,最后将其发布出去
geometry_msgs::PoseStamped pose;
pose.pose.position.x = 0;
pose.pose.position.y = 0;
pose.pose.position.z = 0;
//启动之前发送一些设定值
for(int i = 100; ros::ok() && i > 0; --i){
local_pos_pub.publish(pose);
ros::spinOnce();
rate.sleep();
}
//建立一个类型为SetMode的服务端offb_set_mode,并将其中的模式mode设为"OFFBOARD",作用便是用于后面的客户端与服务端之间的通信(服务)
mavros_msgs::SetMode offb_set_mode;
offb_set_mode.request.custom_mode = "OFFBOARD";
//设定无人机保护模式 POSTION
mavros_msgs::SetMode offb_setPS_mode;
offb_setPS_mode.request.custom_mode = "POSCTL";
//建立一个类型为CommandBool的服务端arm_cmd,并将其中的是否解锁设为"true",作用便是用于后面的客户端与服务端之间的通信(服务)
mavros_msgs::CommandBool arm_cmd;
arm_cmd.request.value = true;
//更新时间
ros::Time last_request = ros::Time::now();
int step = 0;
int sametimes = 0;
while(ros::ok())//进入大循环
{
if (current_state.mode != "OFFBOARD" && (ros::Time::now() - last_request > ros::Duration(5.0)))
{
if (set_mode_client.call(offb_setPS_mode) && offb_setPS_mode.response.mode_sent)
{
ROS_INFO("POSTION PROTECTED");
}
last_request = ros::Time::now();
}
else
{
if( !current_state.armed && (ros::Time::now() - last_request > ros::Duration(5.0)))
{
if( arming_client.call(arm_cmd) && arm_cmd.response.success)
{
ROS_INFO("UAV is arming");//解锁后打印信息
}
last_request = ros::Time::now();
}
else
{
switch(step)
{
case 0:
pose.pose.position.x = 0;
pose.pose.position.y = 0;
pose.pose.position.z = 2;
if (local_pos.pose.position.z > 1.9 && local_pos.pose.position.z < 2.1)
{
if (sametimes > 20)
{
step = 1;
}
else
sametimes++;
}
else sametimes = 0;
break;
case 1:
pose.pose.position.x = 5;
pose.pose.position.y = 0;
pose.pose.position.z = 2;
if (local_pos.pose.position.x > 4.9 && local_pos.pose.position.x < 5.1)
{
if (sametimes > 20)
{
step = 2;
}
else
sametimes++;
}
else sametimes = 0;
break;
case 2:
pose.pose.position.x = 5;
pose.pose.position.y = 5;
pose.pose.position.z = 2;
if (local_pos.pose.position.y > 4.9 && local_pos.pose.position.y < 5.1)
{
if (sametimes > 20)
{
step = 3;
}
else
sametimes++;
}
else sametimes = 0;
break;
case 3:
pose.pose.position.x = 0;
pose.pose.position.y = 5;
pose.pose.position.z = 2;
if (local_pos.pose.position.x > -0.1 && local_pos.pose.position.x < 0.1)
{
if (sametimes > 20)
{
step = 4;
}
else
sametimes++;
}
else sametimes = 0;
break;
case 4:
pose.pose.position.x = 0;
pose.pose.position.y = 0;
pose.pose.position.z = 2;
if (local_pos.pose.position.x > -0.1 && local_pos.pose.position.x < 0.1 && local_pos.pose.position.y > -0.1 && local_pos.pose.position.y < 0.1)
{
if (sametimes > 20)
{
step = 5;
}
else
sametimes++;
}
else sametimes = 0;
break;
case 5:
offb_set_mode.request.custom_mode = "AUTO.LAND";
if (current_state.mode != "AUTO.LAND" && (ros::Time::now() - last_request > ros::Duration(5.0)))
{
if (set_mode_client.call(offb_set_mode) && offb_set_mode.response.mode_sent)
{
ROS_INFO("AUTO.LAND enabled");
}
last_request = ros::Time::now();
}
break;
default:
break;
}
}
}
local_pos_pub.publish(pose); //发布位置信息,所以综上飞机只有先打开offboard模式然后解锁才能飞起来
ros::spinOnce();
rate.sleep();
}
return 0;
}再次编写CMakeList.txt文件
添加
add_executable(offboard_node1 src/offboard_node1.cpp)
target_link_libraries(offboard_node1
${catkin_LIBRARIES}
)编译
之后运行offboard节点
飞机会飞一个正方形
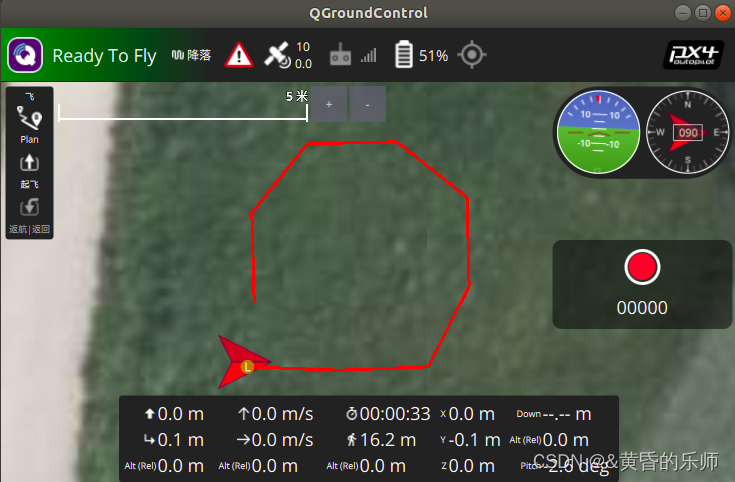
(地面站轨迹有延迟)
添加部分
1.本次代码添加了位置信息订阅
mavros/local_position/lose话题
2.添加悬停模式保护
//设定无人机保护模式 POSTION
mavros_msgs::SetMode offb_setPS_mode;
offb_setPS_mode.request.custom_mode = "POSCTL";if (set_mode_client.call(offb_setPS_mode) && offb_setPS_mode.response.mode_sent)
{
ROS_INFO("POSTION PROTECTED");
}
last_request = ros::Time::now();飞机会自动开启悬停模式,需要我们自己手动开启offboard模式开启控制(在地面站切换即可)
该修改只适合在仿真中进行,不适合在现实中进行,因为如果无人机一旦着陆,会自动切换为悬停模式,飞机会再次起飞
如有需要,可以将
offb_setPS_mode.request.custom_mode = "POSCTL";该行代码的"POSCTL"随意编写.使得终端报错

该报错对无人机没有影响,直接切换offboard模式即可起飞
3.降落模式
在仿真中,无人机降落后会自动上锁,所以悬停保护也不会有什么作用,但是在现实中降落后是需要手动上锁的,不然飞机直接切换悬停模式让电机有怠速,会再次起飞.
所以建议执行上一点的修改.
4.添加模式
注意
所有代码都是在仿真gazebo中进行,不宜直接应用到现实中,现实的情况和仿真差距还是很大的.
如需在现实中调试飞行器,为防止意外发生,请卸下螺旋桨,不然就打开控制器强制上锁,因为源代码会自动请求解锁飞行器.
参考资料:
https://zhuanlan.zhihu.com/p/440996013?utm_id=0
感谢!















 937
937











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









