







 传统五金件制造业的检测面临精度挑战,人工检测难以满足需求。陕西永辉收到客户需求,希望通过机器视觉技术改善钣金件的视觉检测,包括自动剔除缺陷产品。尽管与传统五金件检测相似,但不规则产品的表面缺陷检查具有复杂性,人工判断易出错且效率低。机器视觉的应用有望解决这些问题,提高检测准确性和效率。
传统五金件制造业的检测面临精度挑战,人工检测难以满足需求。陕西永辉收到客户需求,希望通过机器视觉技术改善钣金件的视觉检测,包括自动剔除缺陷产品。尽管与传统五金件检测相似,但不规则产品的表面缺陷检查具有复杂性,人工判断易出错且效率低。机器视觉的应用有望解决这些问题,提高检测准确性和效率。
传统的五金件制造业检测都是依靠着人工检测模式,伴随着精度要求的不断提高,依靠传统手段已经很难实现,此时只能寻求其他突破手段,前不久陕西永辉收到了一位客户有关钣金件视觉检测的需求,希望我们通过机器视觉的手段将检测效率进一步提升,甚至可以增加自动剔除等联动装置。
虽说是钣金件视觉检测,其实和传统的五金件缺陷检测的需求大同小异,接下来我们来了解传统缺陷检测出现的问题:
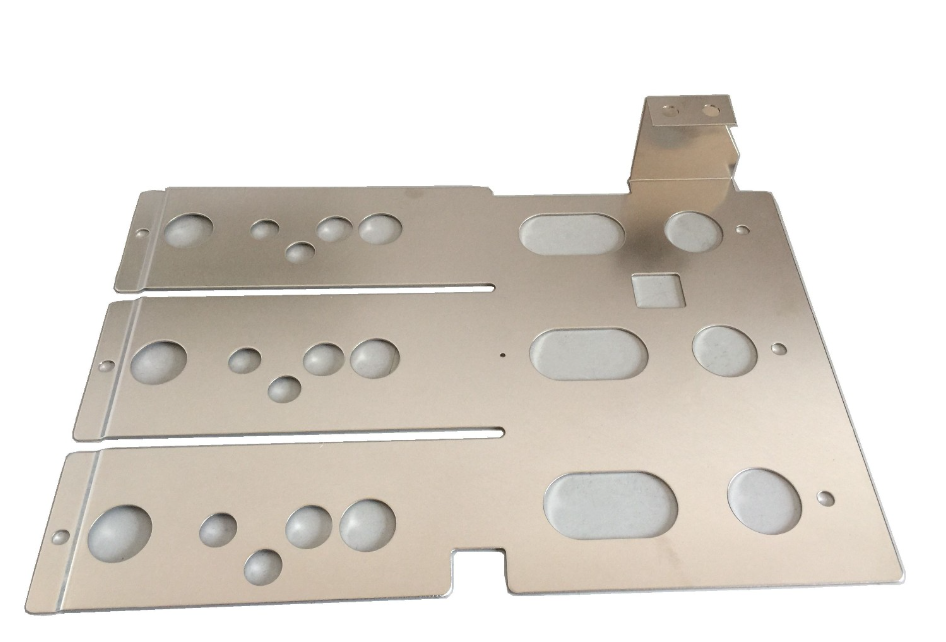
产品的外观。相对而言,平板金属冲压产品的表面缺陷相对容易检查,而非目标奇形怪状产品的表面缺陷检查肯定比较困难;
要检查的缺陷类型,通常五金产品的缺陷无非是漏加工、表面凸起、麻点、划痕、凹坑、电镀异常等。关于漏加工,目测肯定是可以解决的。因为是0和1的关系,有则无。至于表面缺陷,特别是那些不规则的产品,表面缺陷检查就更难了,主要是因为制造商自己对缺陷的定义不确定。即使有非常严格的缺陷定义,在实践中也很难使用人工工具检测出实际的缺陷大小,同样,仍然依靠肉眼来判断缺陷是否达标。这样在目测的过程中就会很难满足用户的要求,要么是检测出太多的不良品,要么是检测结果无法满足用户的要求。

















 676
676

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









