






机器人运动学控制,simulink仿真模型,基于滑膜边结构控制,学习滑膜控制的不二法门,文件包含模型的说明和模型原理讲解

ID:53100681780893574
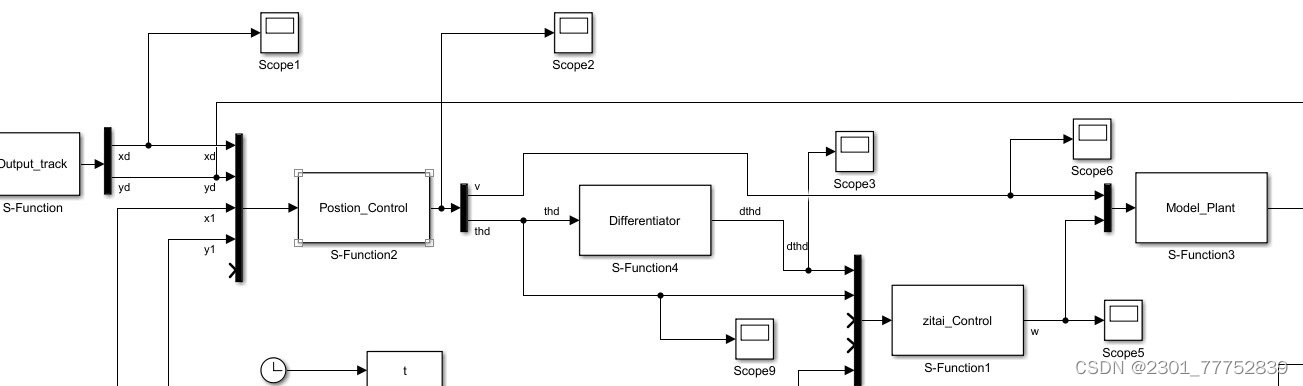
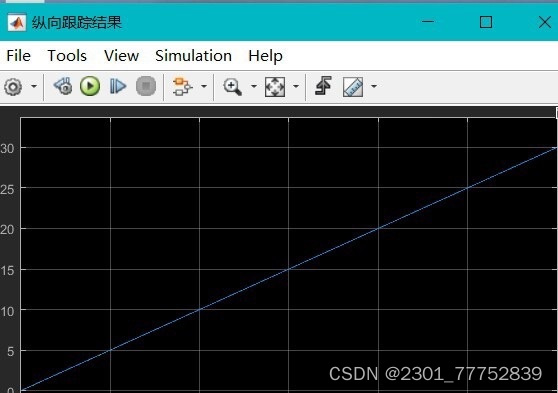
机器人运动学控制,simulink仿真模型,基于滑膜边结构控制,学习滑膜控制的不二法门,文件包含模型的说明和模型原理讲解
ID:53100681780893574
 248
939
248
939











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























