






- 快时间采样
- 定义:快时间采样是指在单个发射脉冲或线性调频脉冲(Chirp)持续时间内,对回波信号进行高速采样。其采样频率通常很高,能够在短时间内获取大量的采样点,以精确地捕捉回波信号在距离维度上的变化。
- 原理依据:根据奈奎斯特采样定理,为了能够无失真地恢复原始信号,采样频率必须大于等于信号最高频率的两倍。在快时间采样中,由于要精确捕捉回波信号在距离维度上的快速变化,所以需要很高的采样频率。例如,对于一个带宽为B的线性调频脉冲信号,其回波信号的带宽也为B,为了准确采样该回波信号,快时间采样频率fs通常要满足fs≥2B。这样可以保证采样后的信号能够准确反映原始回波信号的幅度和相位信息,从而通过后续的信号处理算法精确测量目标的距离。
- 实现方式:通常采用高速模数转换器(ADC)来实现快时间采样。ADC 将模拟的回波信号转换为数字信号,按照设定的采样频率对回波信号进行离散采样,将连续的模拟信号转换为一系列离散的数字样本点,这些样本点包含了回波信号在距离向的详细信息。
- 目的:主要目的是获取目标的距离信息。通过对快时间采样得到的回波信号进行处理,如匹配滤波等,可以得到目标在距离向的分布,实现对目标距离的精确测量。例如,在雷达系统中,快时间采样可以帮助确定目标与雷达之间的距离,分辨率较高,能够区分不同距离上的多个目标。
- 应用场景:常用于需要精确测量目标距离的场合,如目标定位、地形测绘等。在汽车雷达中,快时间采样用于实时监测前方车辆或障碍物的距离,为自动驾驶或辅助驾驶系统提供关键的距离信息,以实现安全的跟车、避障等功能。
- 慢时间采样
- 定义:慢时间采样是在多个脉冲重复周期(PRI)内,对回波信号进行采样。它是在快时间采样的基础上,从较长时间尺度上对回波信号进行观测和采样,采样频率相对较低。
- 原理依据:当目标相对于雷达运动时,由于多普勒效应,回波信号在不同脉冲重复周期之间会产生相位变化。慢时间采样通过在多个脉冲重复周期内对回波信号进行采样,捕捉到这种相位变化信息。根据多普勒频移公式\(f_d = \frac{2v}{\lambda}f_0\)(其中\(f_d\)为多普勒频移,v为目标径向速度,\(\lambda\)为雷达信号波长,\(f_0\)为发射信号频率),通过对采样得到的回波信号进行相位分析和处理,可以计算出目标的多普勒频移,进而得到目标的径向速度信息。
- 实现方式:慢时间采样通常是在快时间采样的基础上,对多个脉冲重复周期内的快时间采样数据进行整合和处理。可以通过对快时间采样得到的数字信号进行存储和累加,在多个脉冲重复周期后进行统一的分析和处理,以提取出目标的多普勒信息。例如,通过对一系列相邻脉冲重复周期内的回波信号进行傅里叶变换等处理,将信号从时域转换到频域,从而检测到多普勒频移对应的频率分量,实现对目标速度的测量。
- 目的:主要用于获取目标的多普勒信息,即目标的径向速度。由于目标的运动,会使回波信号在不同的脉冲重复周期之间产生相位变化,通过慢时间采样对这些相位变化进行观测和分析,可以计算出目标的多普勒频移,进而得到目标的速度信息。此外,慢时间采样也有助于对目标进行长时间的跟踪和状态监测。
- 应用场景:在雷达目标跟踪、气象监测等领域有广泛应用。在航空交通管制雷达中,通过慢时间采样获取飞机的速度信息,结合快时间采样得到的距离信息,实现对飞机的精确跟踪和定位,保障空中交通的安全和有序。在气象雷达中,慢时间采样用于监测气象目标(如云层、雨滴等)的运动速度,为气象预报和灾害预警提供重要的数据支持。
快时间采样和慢时间采样组成数据矩阵
数据获取
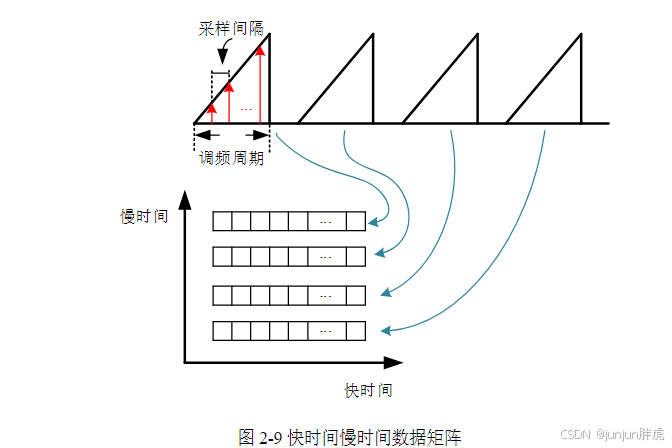
- 快时间采样在单个发射脉冲或线性调频脉冲持续时间内,对回波信号进行高速采样,得到一系列表示距离信息的采样点数据。假设快时间采样点数为N,则对于每个脉冲的回波,快时间采样会得到一个长度为N的一维数据向量,这个向量包含了该脉冲回波在不同距离单元上的信息。
- 慢时间采样是在多个脉冲重复周期内进行的。设慢时间采样的脉冲数为M,那么慢时间采样过程会收集到M个快时间采样得到的一维数据向量。
矩阵组合
将这M个长度为N的快时间采样数据向量按顺序排列,就可以构成一个\(M\times N\)的二维矩阵。在这个矩阵中,行表示慢时间维度,每一行对应一个脉冲重复周期内的快时间采样数据,即包含了该时刻目标在不同距离上的信息;列表示快时间维度,每一列对应不同脉冲重复周期中同一距离单元的采样数据,反映了该距离单元上目标信息随时间的变化。这样,通过将快时间和慢时间采样数据组合成矩阵,就可以在二维平面上全面地表示雷达回波信号的时空信息,方便后续进行各种信号处理和分析算法,如距离 - 多普勒成像、目标检测与跟踪等。
快时间采样和慢时间采样和天线数组成三维矩阵
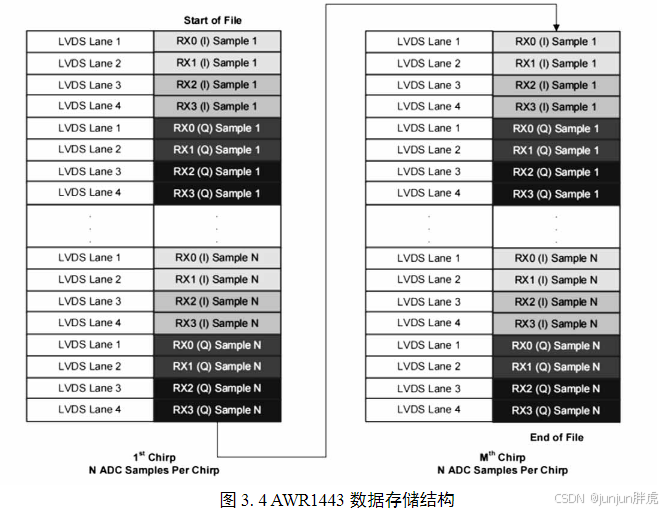
在雷达输出原始数据整形成三维矩阵,需要将原始文件中对应的 I/Q 两路信号整合为复数完整的复数信号, 接下来将每一组 LVD 复数信号按照行为快时间采样行,慢时间采样列整合为一 个矩阵。其中快时间代表毫米波雷达每个 chirp 的采样点数,慢时间采样为每帧的采样点数。
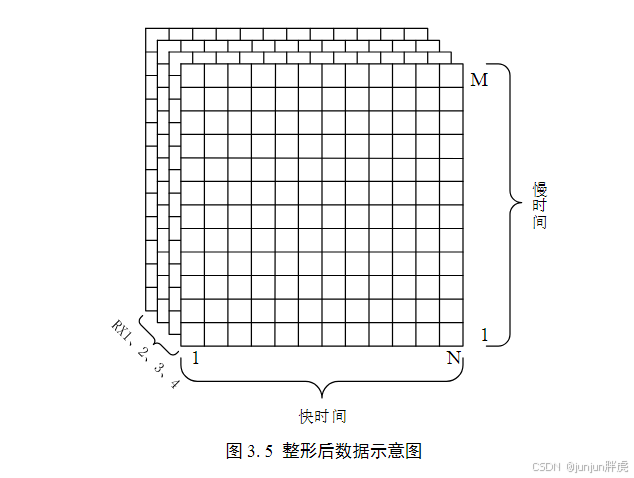
最后将四组 LVDS 信号,即四组接收天线信号进行整合,成为快时间×慢时 间×天线数的一个 3 维矩阵。图 3.5 为整形后数据示意图。快时间数据可以反映 目标物体距离变化信息,慢时间数据可以反映目标物体速度和相位变化信息,而 通过快时间与慢时间及天线数的矩阵即可得出目标角度信息。

















 3570
3570

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









