






基于动态窗口算法的AGV仿真避障
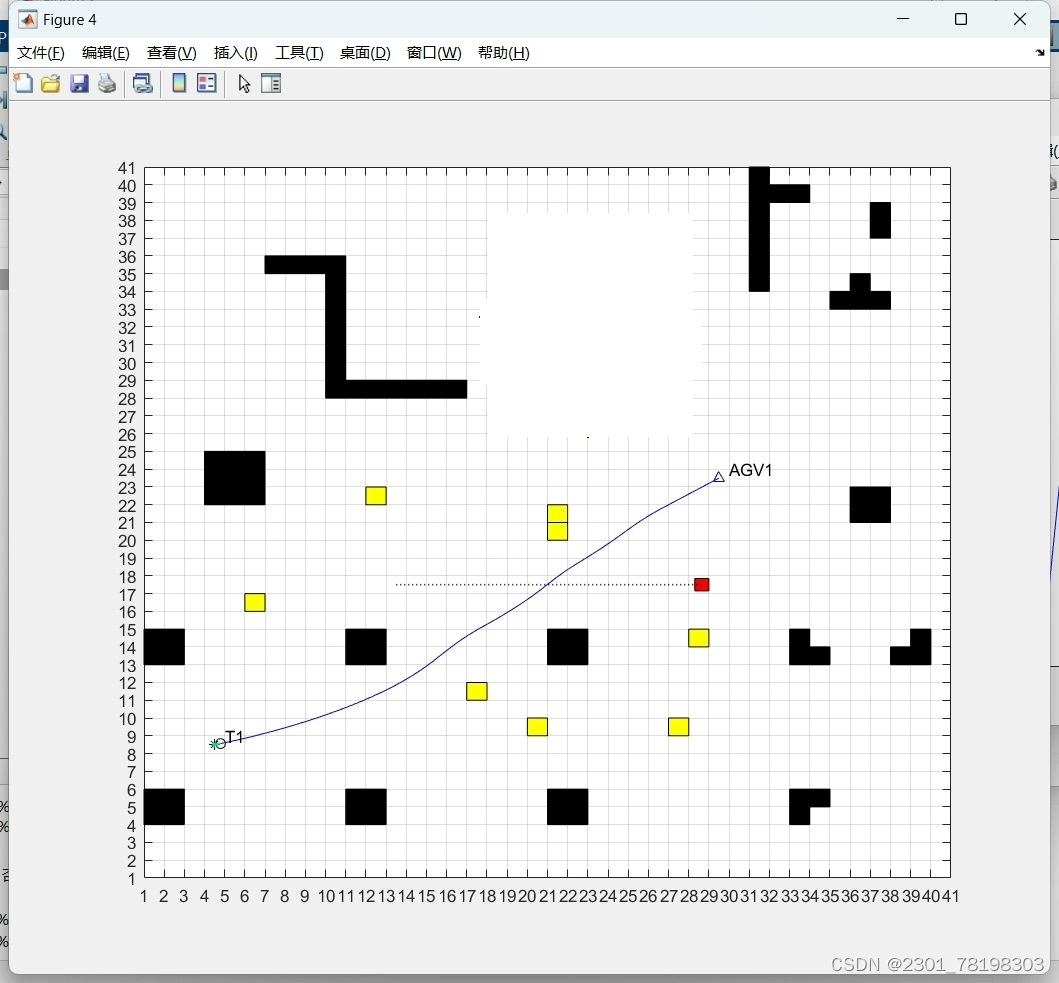
可设置起点目标点,设置地图,设置移动障碍物起始点目标点,未知静态障碍物
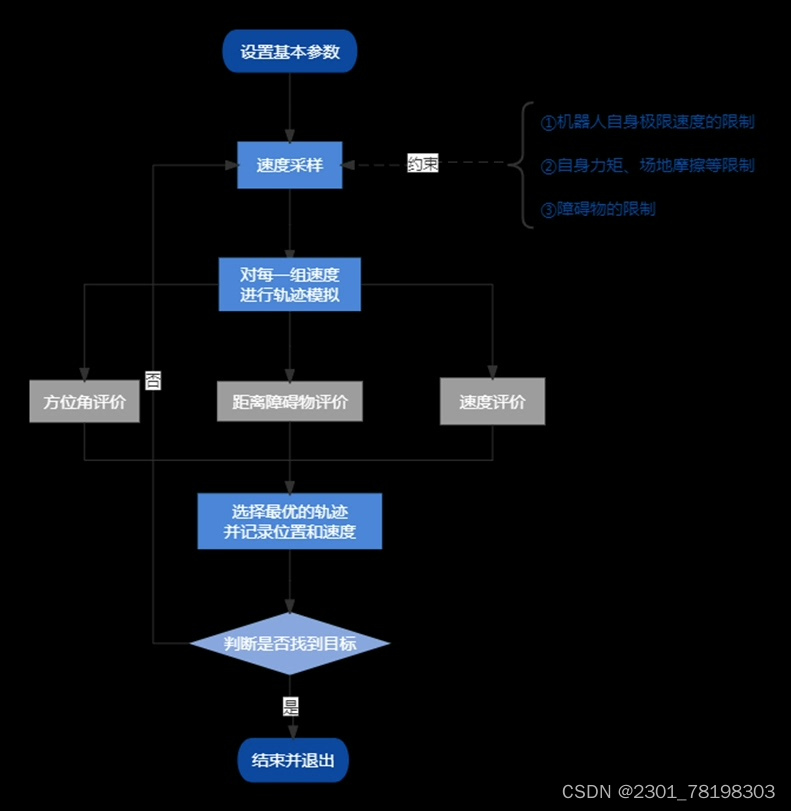
动态窗口方法(DynamicWindowApproach) 是一种可以实现实时避障的局部规划算法,通过将轮式机器人的位置约束转化为速度约束,根据约束进行速度采样,并由一系列的选定速度的动作生成轨迹,结合评价函数选择评分最高的轨迹,实现执行最优速度的问题。
黄色是静态障碍物,红色是可移动障碍物
YID:13150709436275944
基于动态窗口算法的AGV仿真避障
可设置起点目标点,设置地图,设置移动障碍物起始点目标点,未知静态障碍物
动态窗口方法(DynamicWindowApproach) 是一种可以实现实时避障的局部规划算法,通过将轮式机器人的位置约束转化为速度约束,根据约束进行速度采样,并由一系列的选定速度的动作生成轨迹,结合评价函数选择评分最高的轨迹,实现执行最优速度的问题。
黄色是静态障碍物,红色是可移动障碍物
YID:13150709436275944











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言



















 6987
6987





