







【7】树莓派图像分类部署
文章目录
树莓派学习笔记
2024/6/15
参考文档
树莓派快速上手说明
一、树莓派介绍
- 树莓派开发板
- 安装Linux系统
- 链接设备
通过HDMI链接显示器
USB键盘
USB鼠标 - 用Python编写控制代码
我使用的是树莓派4B 4GB主板,组装效果如图所示(包含CSI摄像头模块、树莓派主板、USB键盘鼠标、7寸显示器)

二、烧录系统
将树莓派系统,烧录到SD卡中,然后将SD插到树莓派,连接上HDMI就能看到开机画面
2.1. 准备
【树莓派64位版本】如果用到pytorch等AI相关功能,选择此版本
链接:https://pan.baidu.com/s/1mTBoVgr5Tg5ORQumAV0_1g?pwd=1wht
提取码:1wht
–来自百度网盘超级会员V5的分享
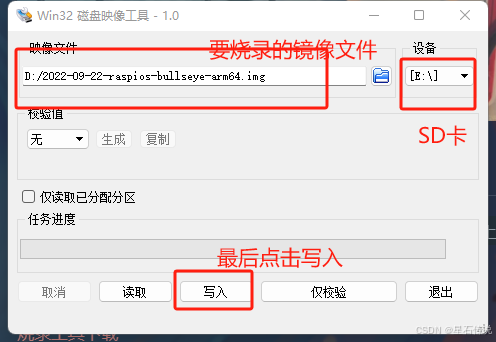
2.2. 烧录
-
首先将SD卡插入电脑中,打开win32diskimager,选择要烧录的SD卡,选择要烧录的镜像文件,点击写入,等待写入完成。

-
写入完成后,取出SD卡,插入树莓派

三、运行树莓派
- 将SD卡插入树莓派后,连接上HDMI,USB键盘鼠标,电源


- 开机,等待开机完成,进入系统(若是第一次开机,要设置用户名密码等)
参考文章:第一次运行树莓派
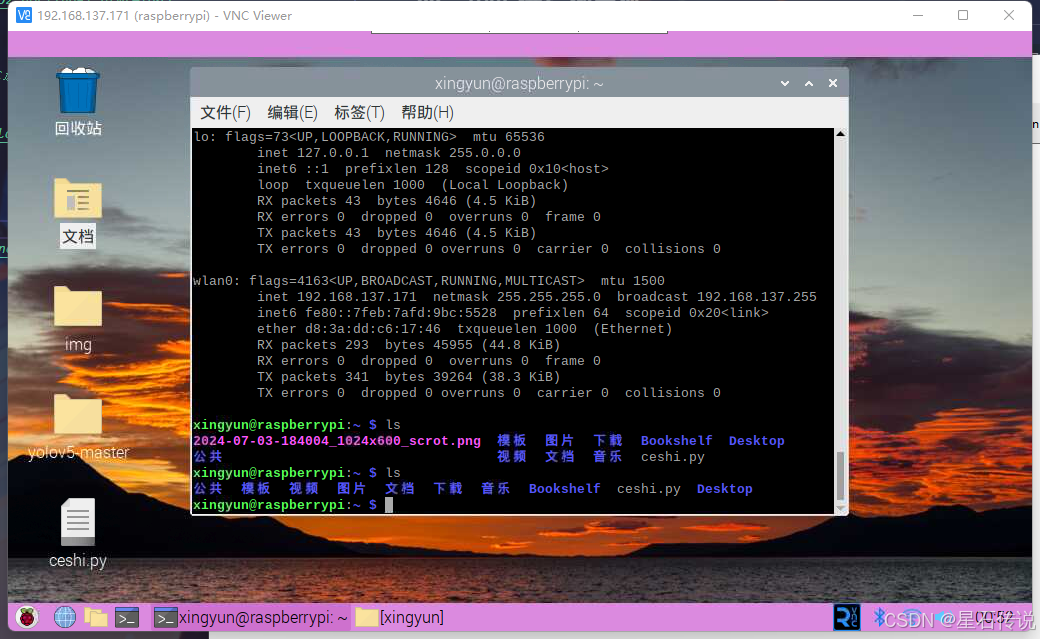
四、VNC远程树莓派
为了在电脑上可以远程控制树莓派屏幕显示的内容,便于开发调试,我们可以启用VNC远程桌面功能
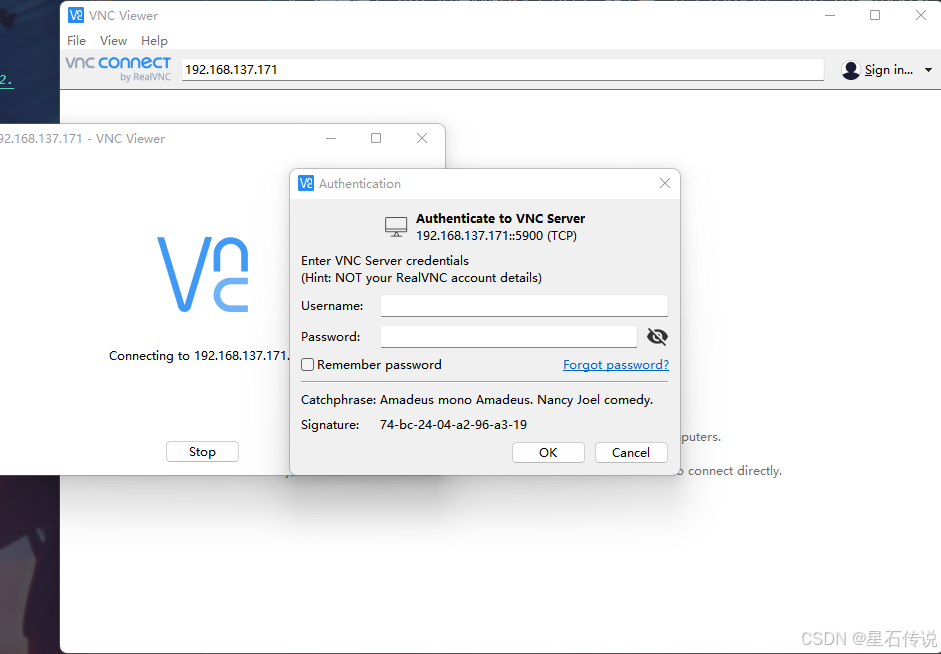
4.1. 在电脑上安装VNC Viewer
4.2. 树莓派上开启VNC功能
树莓派连接电脑移动热点:
如何使用树莓派连接电脑无线网络热点并查看树莓派ip地址
输入树莓派ip地址,回车;之后输入之前设置的用户名密码,点击OK,即可进入树莓派桌面
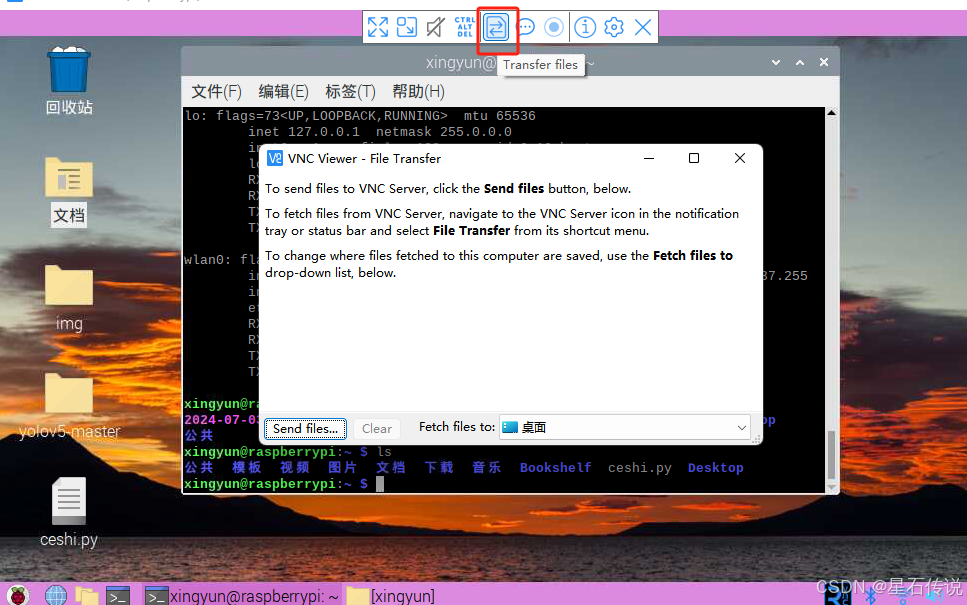
4.3. 补充(传输文件)
开启VNC之后,可以在电脑上传输文件到树莓派
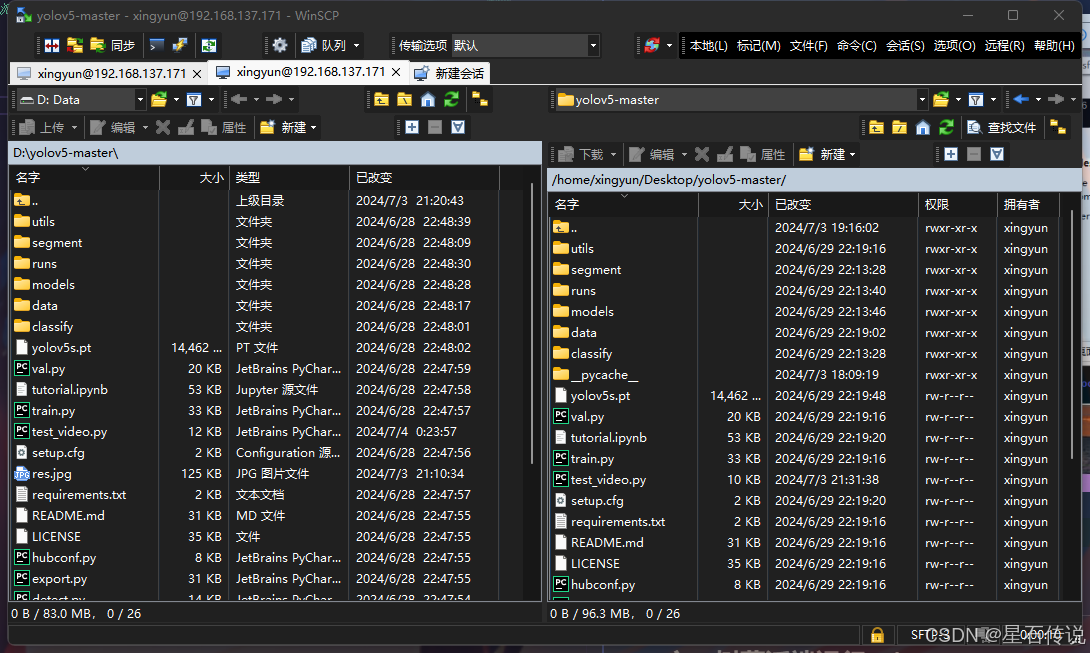
我一般使用WinSCP来进行文件的传输;
winscp的下载与使用,推荐文章:文件传输工具WinSCP下载安装教程
-
在这之前记得开启树莓派上的SSH

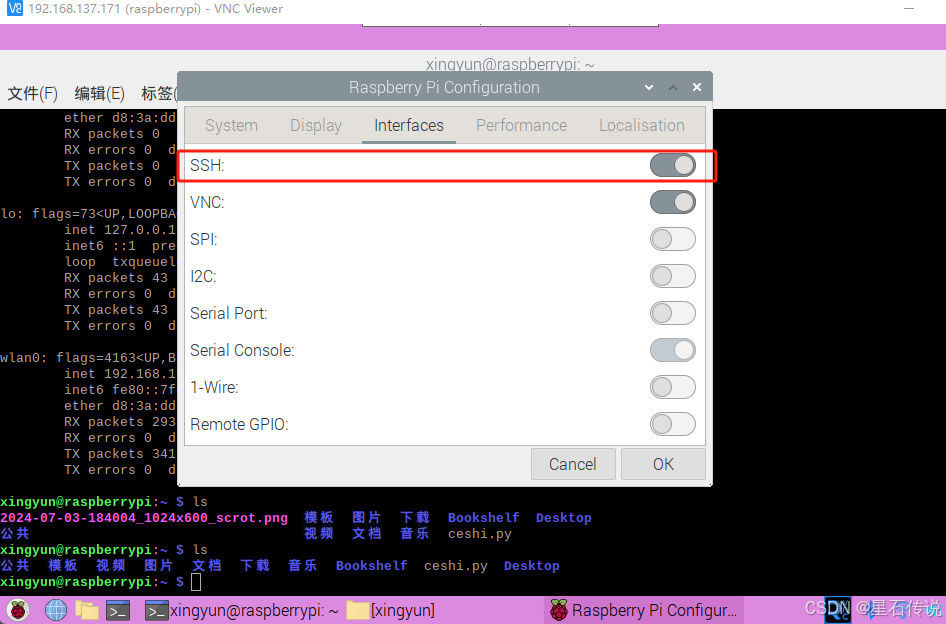
-
之后则是在电脑上打开WinSCP,选择树莓派的ip地址,输入用户名密码,即可进行文件传输

4.4. 补充(安装中文输入法)
树莓派默认安装的是英文输入法,如果需要中文输入法,需要安装中文输入法 树莓派4B——显示中文和添加中文输入法
- 安装中文字体库(终端中输入以下命令):
sudo apt-get install ttf-wqy-zenhei
- 添加中文输入法sunpinyin和google拼音
sudo apt-get install fcitx fcitx-googlepinyin fcitx-module-cloudpinyin fcitx-sunpinyin
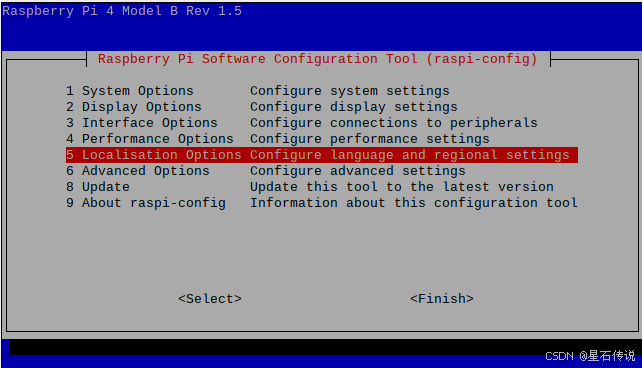
- 设置支持中文(在终端输入以下代码打开设置界面)
sudo raspi-config

-
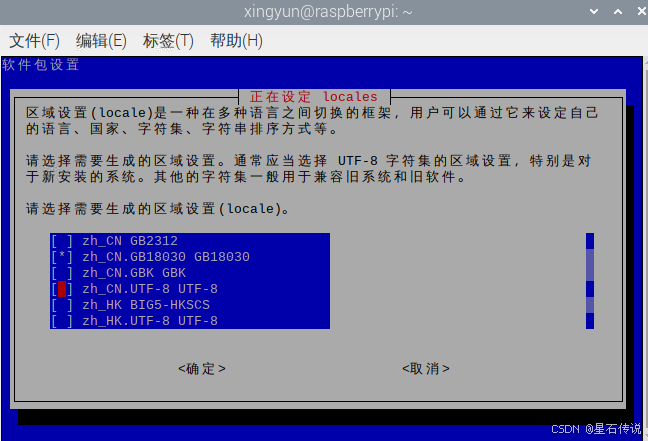
打开树莓派设置,修改character set为GB18030并确认,过程完成后会提示重启,重启即可
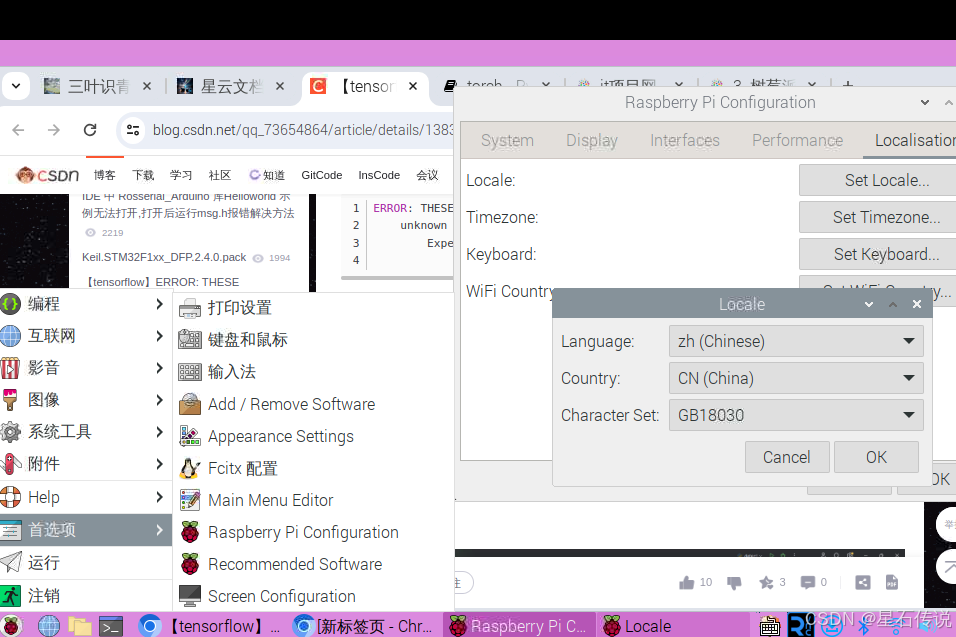
-
成功后,会出现一个键盘的小图标,点击即可切换输入法

五、opencv+摄像头模块的初步使用
首先下载opencv的python包
pip install opencv-python -i https://pypi.tuna.tsinghua.edu.cn/simple
#更新numpy
pip install numpy --upgrade -i https://pypi.tuna.tsinghua.edu.cn/simple
5.1. 组装摄像头模块
5.2. 测试摄像头
测试代码如下:
import cv2
cap = cv2.VideoCapture(0) # 调用摄像头‘0’一般是打开电脑自带摄像头,‘1’是打开外部摄像头(只有一个摄像头的情况)
width = 1280
height = 960
cap.set(cv2.CAP_PROP_FRAME_WIDTH, width) # 设置图像宽度
cap.set(cv2.CAP_PROP_FRAME_HEIGHT, height) # 设置图像高度
# 显示图像
while True:
ret, frame = cap.read() # 读取图像(frame就是读取的视频帧,对frame处理就是对整个视频的处理)
# print(ret)
# ######例如将图像灰度化处理,
img=cv2.cvtColor(frame,cv2.COLOR_BGR2GRAY) # 转灰度图
cv2.imshow("img", img)
# #######图像不处理的情况
cv2.imshow("frame", frame)
input_str = cv2.waitKey(20)
if input_str == ord('q'): # 如过输入的是q就break,结束图像显示,鼠标点击视频画面输入字符
break
cap.release() # 释放摄像头
cv2.destroyAllWindows() # 销毁窗口
打开树莓派自带的编程文件Thonny,然后运行此代码
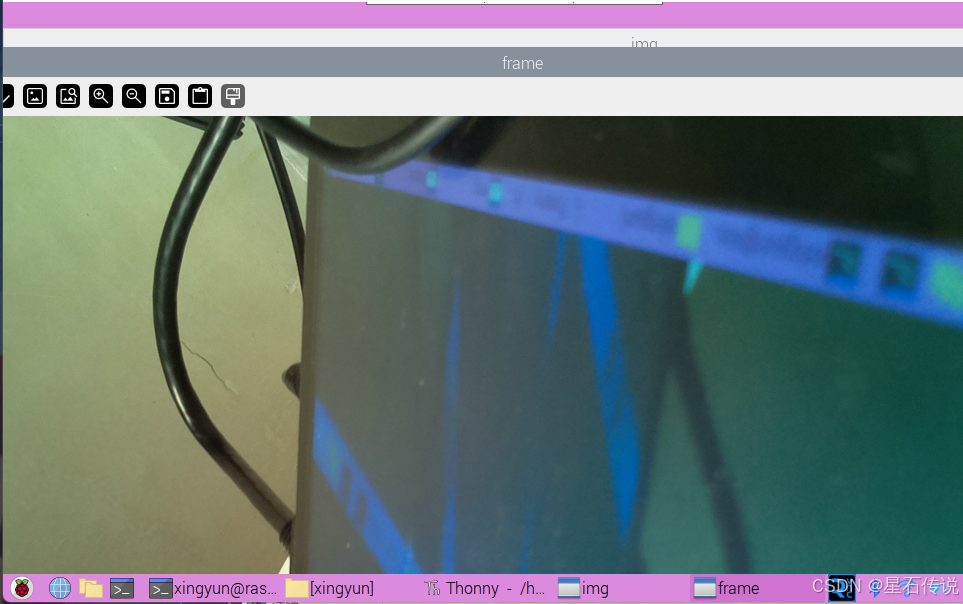
成功运行,打开摄像头!
六、PC端 YOLOv5识别图片
租用GPU云服务器进行训练
#训练的命令:
python3 train.py --weights yolov5s.pt --data data/ChineseChess/ChineseChess.yaml --workers 4 --batch-size 20 --epochs 100
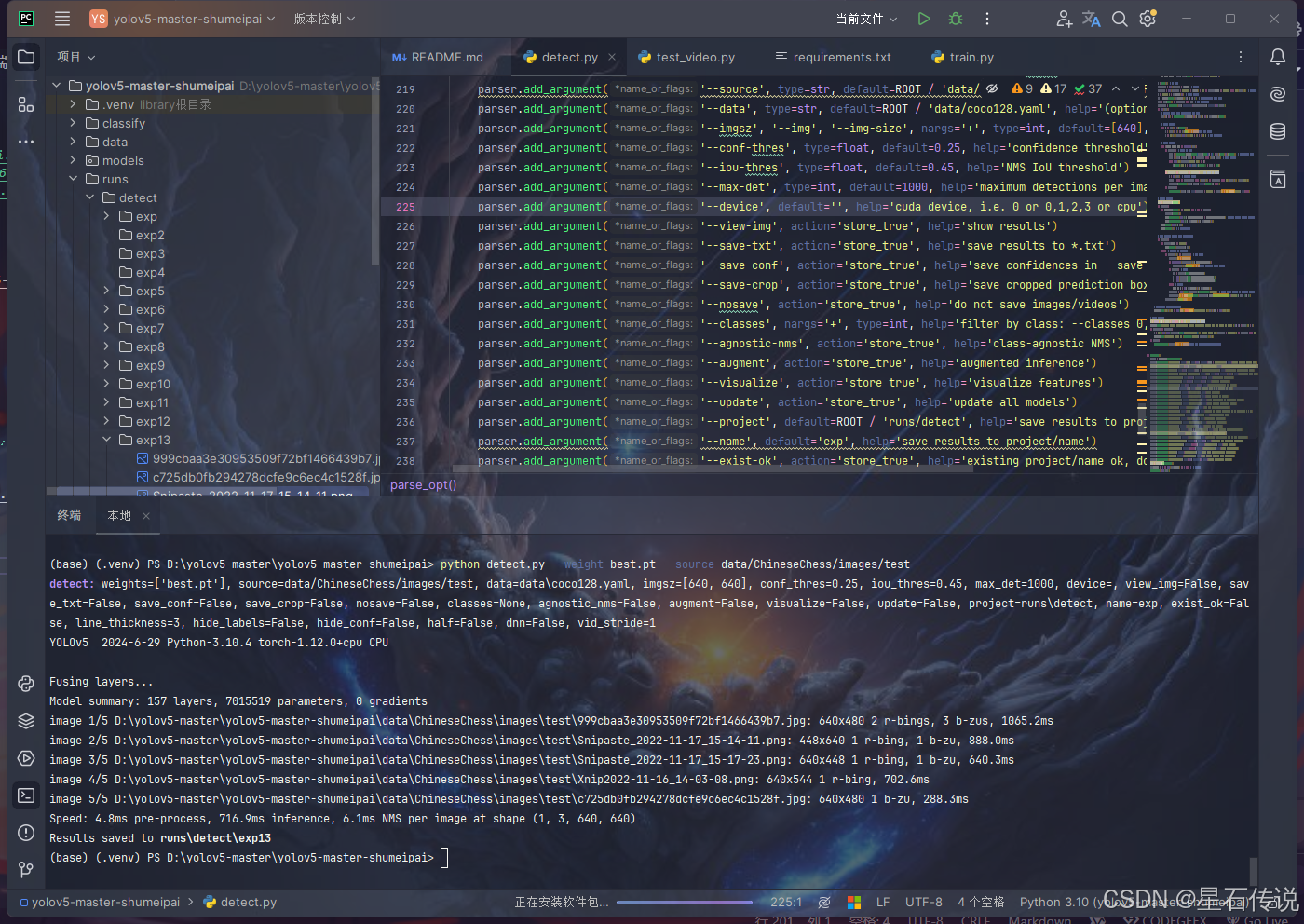
#识别的命令:
python3 detect.py --weight best.pt --source data/ChineseChess/images/test
代码下载(包含训练好的模型文件best.pt):
链接:https://pan.baidu.com/s/1bT9Cs8EmTI-5OeBn5-oLxQ?pwd=53ta
提取码:53ta
–来自百度网盘超级会员V5的分享
使用pycharm打开该项目,配置好环境后,能正常运行

七、树莓派端运行yolov5
将代码目录上传到树莓派后,进入代码目录,在终端中运行:
# 安装依赖包,python版本在3.9到3.11之间都可以
pip install -r requirements.txt -i https://pypi.tuna.tsinghua.edu.cn/simple
# 运行测试图片识别
python detect.py --weight best.pt --source data/ChineseChess/images/test
#打开摄像头实时识别
python detect.py --weight best.pt --source 0
与PC端的操作大致一样
八、使用onnx加速
生成所需的onnx模型,并安装onnx和onnxruntime
#安装onnx和onnxruntime
pip install onnx onnxruntime -i https://pypi.tuna.tsinghua.edu.cn/simple
#生成onnx模型
python export.py --weights best.pt --include onnx

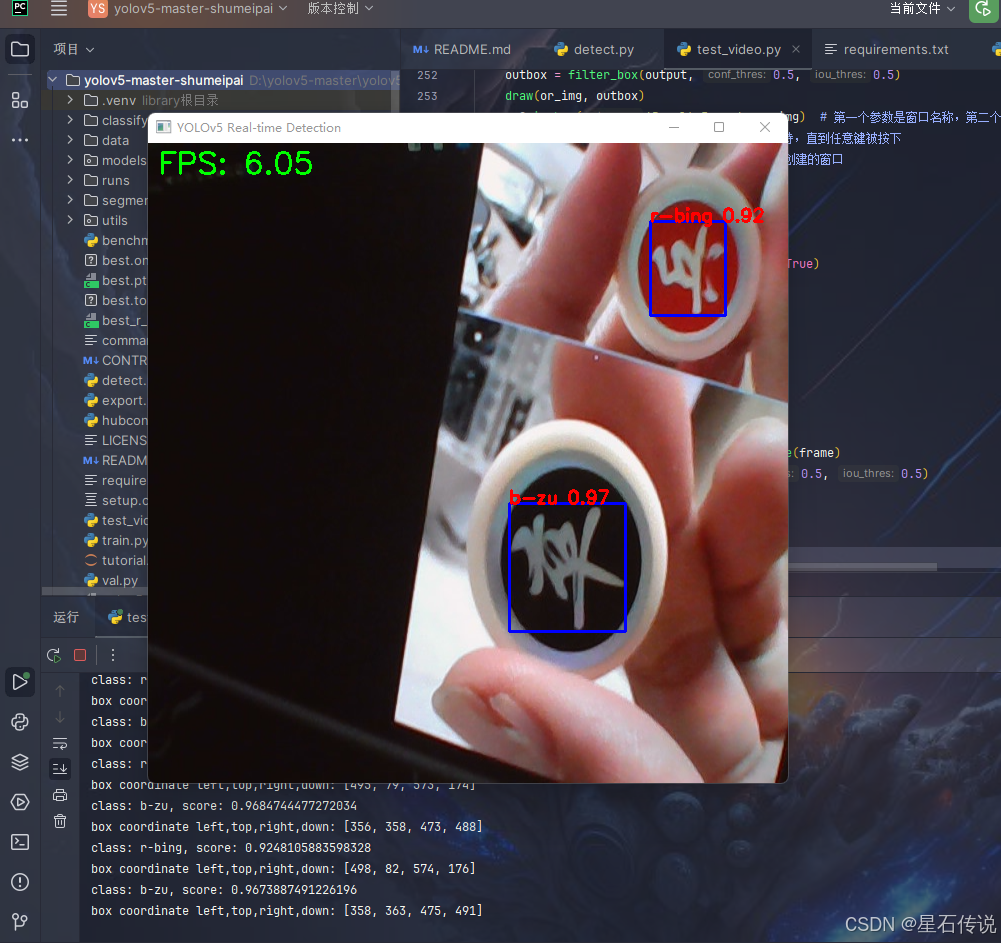
编写一个代码文件test_video.py,用来运行onnx模型文件,并实时显示摄像头画面和帧率
import cv2
import numpy as np
import onnxruntime
import time
import torch
CLASSES = ['r-bing', 'b-zu']
class YOLOV5:
def __init__(self, model_path, use_onnx=False):
self.use_onnx = use_onnx
if use_onnx:
self.session = onnxruntime.InferenceSession(model_path)
self.input_name = self.get_input_name()
self.output_name = self.get_output_name()
else:
# 有点问题,算了
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
self.model = torch.load(model_path, map_location=device)
self.model.eval()
def get_input_name(self):
if self.use_onnx:
input_name = [node.name for node in self.session.get_inputs()]
return input_name
else:
raise NotImplementedError("This method is only for ONNX models.")
def get_output_name(self):
if self.use_onnx:
output_name = [node.name for node in self.session.get_outputs()]
return output_name
else:
raise NotImplementedError("This method is only for ONNX models.")
def preprocess_image(self, image):
# 图像预处理逻辑,与原始逻辑保持一致
resized_img = cv2.resize(image, (640, 640))
img_tensor = resized_img[:, :, ::-1].transpose(2, 0, 1) # BGR to RGB, HWC to CHW
img_tensor = img_tensor.astype(np.float32)
img_tensor /= 255.0
img_tensor = np.expand_dims(img_tensor, axis=0)
return img_tensor, resized_img
def inference_pt(self, img):
img_tensor, resized_img = self.preprocess_image(img)
with torch.no_grad():
outputs = self.model(torch.from_numpy(img_tensor))
return outputs.detach().numpy(), resized_img
def inference_onnx(self, img):
img_tensor, resized_img = self.preprocess_image(img)
input_feed = {self.input_name[0]: img_tensor}
pred = self.session.run(None, input_feed)[0]
return pred, resized_img
def inference(self, img):
if self.use_onnx:
return self.inference_onnx(img)
else:
return self.inference_pt(img)
# dets: array [x,6] 6个值分别为x1,y1,x2,y2,score,class
# thresh: 阈值
def nms(dets, thresh):
x1 = dets[:, 0]
y1 = dets[:, 1]
x2 = dets[:, 2]
y2 = dets[:, 3]
# -------------------------------------------------------
# 计算框的面积
# 置信度从大到小排序
# -------------------------------------------------------
areas = (y2 - y1 + 1) * (x2 - x1 + 1)
scores = dets[:, 4]
keep = []
index = scores.argsort()[::-1]
while index.size > 0:
i = index[0]
keep.append(i)
# -------------------------------------------------------
# 计算相交面积
# 1.相交
# 2.不相交
# -------------------------------------------------------
x11 = np.maximum(x1[i], x1[index[1:]])
y11 = np.maximum(y1[i], y1[index[1:]])
x22 = np.minimum(x2[i], x2[index[1:]])
y22 = np.minimum(y2[i], y2[index[1:]])
w = np.maximum(0, x22 - x11 + 1)
h = np.maximum(0, y22 - y11 + 1)
overlaps = w * h
# -------------------------------------------------------
# 计算该框与其它框的IOU,去除掉重复的框,即IOU值大的框
# IOU小于thresh的框保留下来
# -------------------------------------------------------
ious = overlaps / (areas[i] + areas[index[1:]] - overlaps)
idx = np.where(ious <= thresh)[0]
index = index[idx + 1]
return keep
def xywh2xyxy(x):
# [x, y, w, h] to [x1, y1, x2, y2]
y = np.copy(x)
y[:, 0] = x[:, 0] - x[:, 2] / 2
y[:, 1] = x[:, 1] - x[:, 3] / 2
y[:, 2] = x[:, 0] + x[:, 2] / 2
y[:, 3] = x[:, 1] + x[:, 3] / 2
return y
def filter_box(org_box, conf_thres, iou_thres): # 过滤掉无用的框
# -------------------------------------------------------
# 删除为1的维度
# 删除置信度小于conf_thres的BOX
# -------------------------------------------------------
org_box = np.squeeze(org_box)
conf = org_box[..., 4] > conf_thres
box = org_box[conf == True]
# -------------------------------------------------------
# 通过argmax获取置信度最大的类别
# -------------------------------------------------------
cls_cinf = box[..., 5:]
cls = []
for i in range(len(cls_cinf)):
cls.append(int(np.argmax(cls_cinf[i])))
all_cls = list(set(cls))
# -------------------------------------------------------
# 分别对每个类别进行过滤
# 1.将第6列元素替换为类别下标
# 2.xywh2xyxy 坐标转换
# 3.经过非极大抑制后输出的BOX下标
# 4.利用下标取出非极大抑制后的BOX
# -------------------------------------------------------
output = []
for i in range(len(all_cls)):
curr_cls = all_cls[i]
curr_cls_box = []
curr_out_box = []
for j in range(len(cls)):
if cls[j] == curr_cls:
box[j][5] = curr_cls
curr_cls_box.append(box[j][:6])
curr_cls_box = np.array(curr_cls_box)
# curr_cls_box_old = np.copy(curr_cls_box)
curr_cls_box = xywh2xyxy(curr_cls_box)
curr_out_box = nms(curr_cls_box, iou_thres)
for k in curr_out_box:
output.append(curr_cls_box[k])
output = np.array(output)
return output
def draw(image, box_data):
# -------------------------------------------------------
# 取整,方便画框
# -------------------------------------------------------
boxes = box_data[..., :4].astype(np.int32)
scores = box_data[..., 4]
classes = box_data[..., 5].astype(np.int32)
for box, score, cl in zip(boxes, scores, classes):
top, left, right, bottom = box
print('class: {}, score: {}'.format(CLASSES[cl], score))
print('box coordinate left,top,right,down: [{}, {}, {}, {}]'.format(top, left, right, bottom))
cv2.rectangle(image, (top, left), (right, bottom), (255, 0, 0), 2)
cv2.putText(image, '{0} {1:.2f}'.format(CLASSES[cl], score),
(top, left),
cv2.FONT_HERSHEY_SIMPLEX,
0.6, (0, 0, 255), 2)
if __name__ == "__main__":
onnx_path = r"best.onnx"
model = YOLOV5(onnx_path, use_onnx=True)
img_path = r"D:\yolov5-master\data\ChineseChess\images\test\Snipaste_2022-11-17_15-14-11.png"
img = cv2.imread(img_path)
output, or_img = model.inference(img)
outbox = filter_box(output, 0.5, 0.5)
draw(or_img, outbox)
cv2.imshow('Result Image', or_img) # 第一个参数是窗口名称,第二个参数是要显示的图像
cv2.waitKey(0) # 等待按键操作,0表示无限等待,直到任意键被按下
cv2.destroyAllWindows() # 关闭所有OpenCV创建的窗口
# cv2.imwrite('res.jpg', or_img)
# 使用ONNX模型
onnx_path = r"best.onnx"
model_onnx = YOLOV5(onnx_path, use_onnx=True)
# 根据需要选择模型进行推理
cap = cv2.VideoCapture(0)
while True:
ret, frame = cap.read()
if not ret:
break
start_time = time.time()
# 使用ONNX模型推理
output, or_img = model_onnx.inference(frame)
outbox = filter_box(output, 0.5, 0.5)
if outbox.size > 0:
draw(or_img, outbox)
else:
print("No detections found.")
# 即使没有检测到物体,也应该使用原始图像or_img来显示FPS,但这里直接使用frame假设没有改变它
or_img = frame # 确保or_img是最新的图像
end_time = time.time()
fps = 1.0 / (end_time - start_time)
cv2.putText(or_img, f'FPS: {fps:.2f}', (10, 30), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 2) # 在带有预测框的图像上写入FPS
cv2.imshow('YOLOv5 Real-time Detection', or_img) # 确保显示带有FPS和预测框的图像
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
总结
本文主要记录了我学习树莓派时的笔记,包括对树莓派的认识和组装、树莓派的运行和VNC远程连接、摄像头模块的使用、以及最后的使用yolov5来对象棋进行识别等。
(尝试了以下租用GPU 进行训练,不得不说与之前使用kaggle平台相比,还是氪金玩家比较爽。省去了配置环境的麻烦)
另外,也是因为目前暂时没有yolo的三叶青标记数据,所以数据是从其它教程中找过来的。


















 3228
3228

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











