






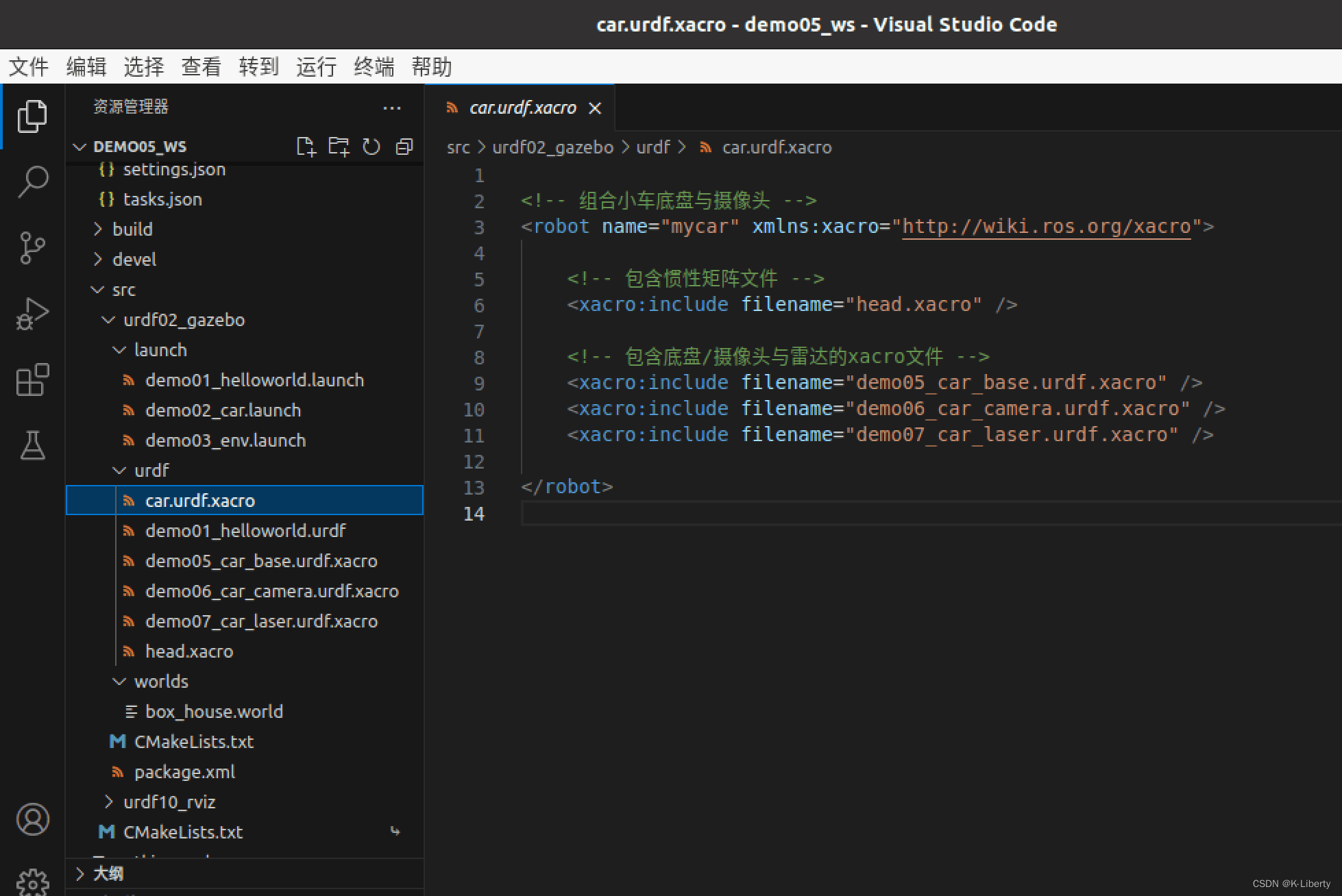
实现流程:
1、编写封装惯性矩阵算法的 xacro 文件
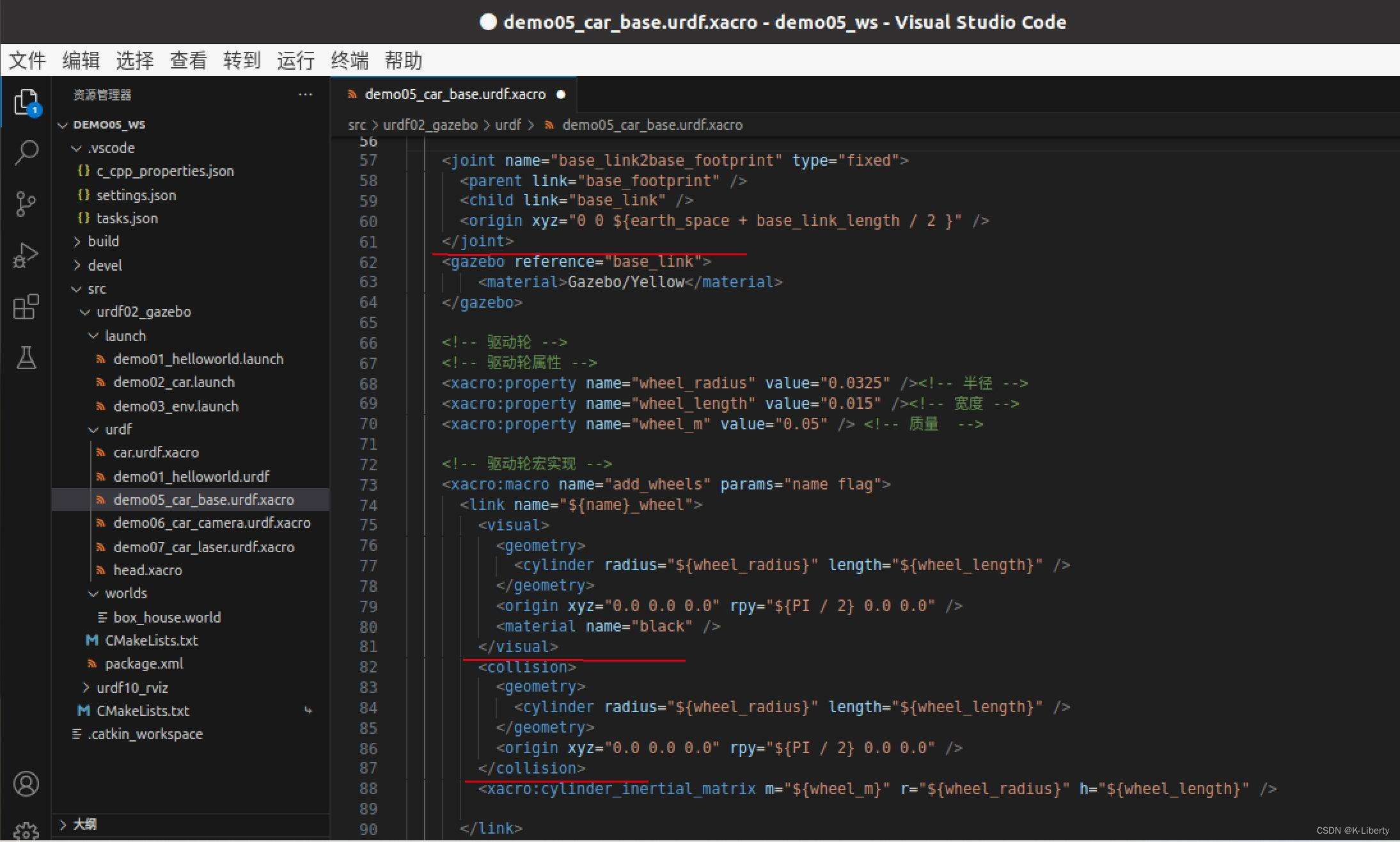
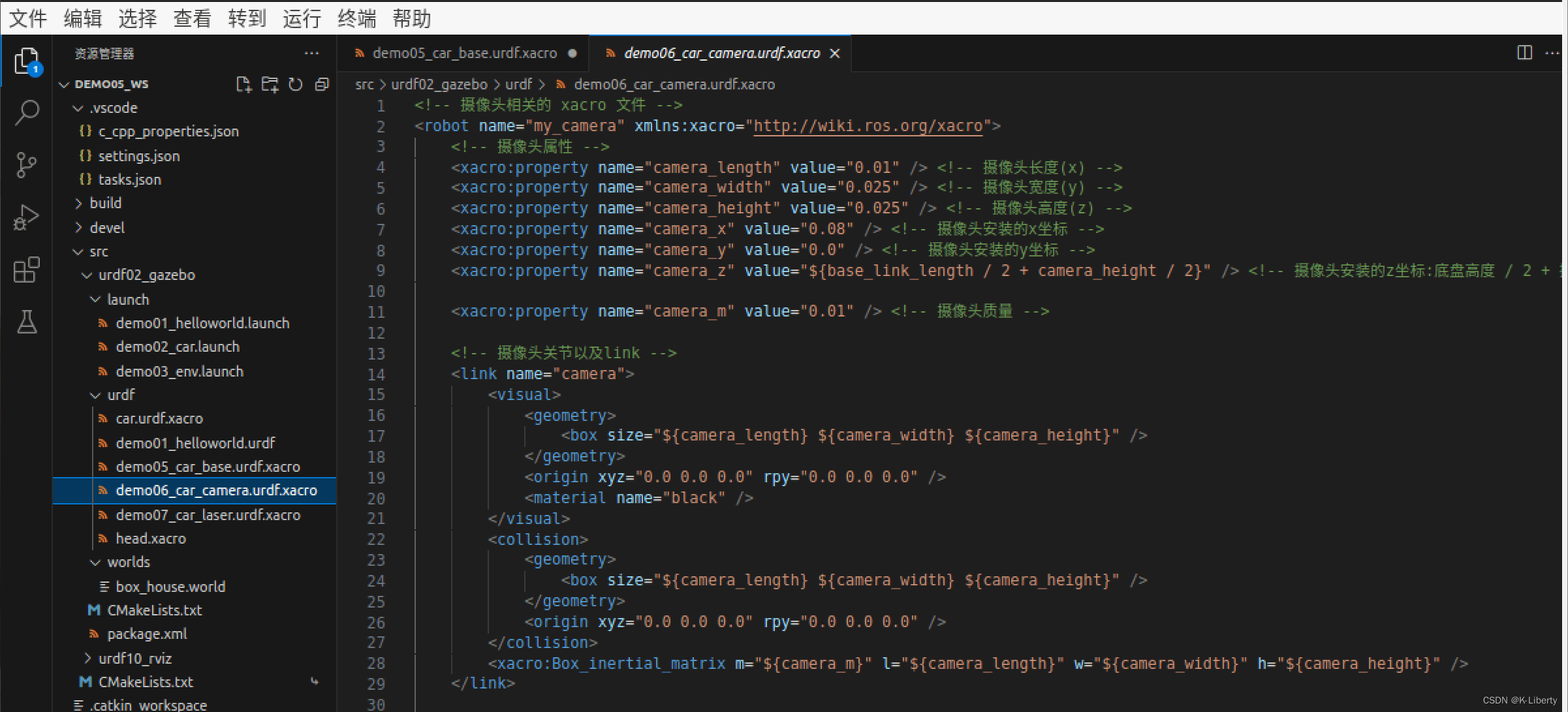
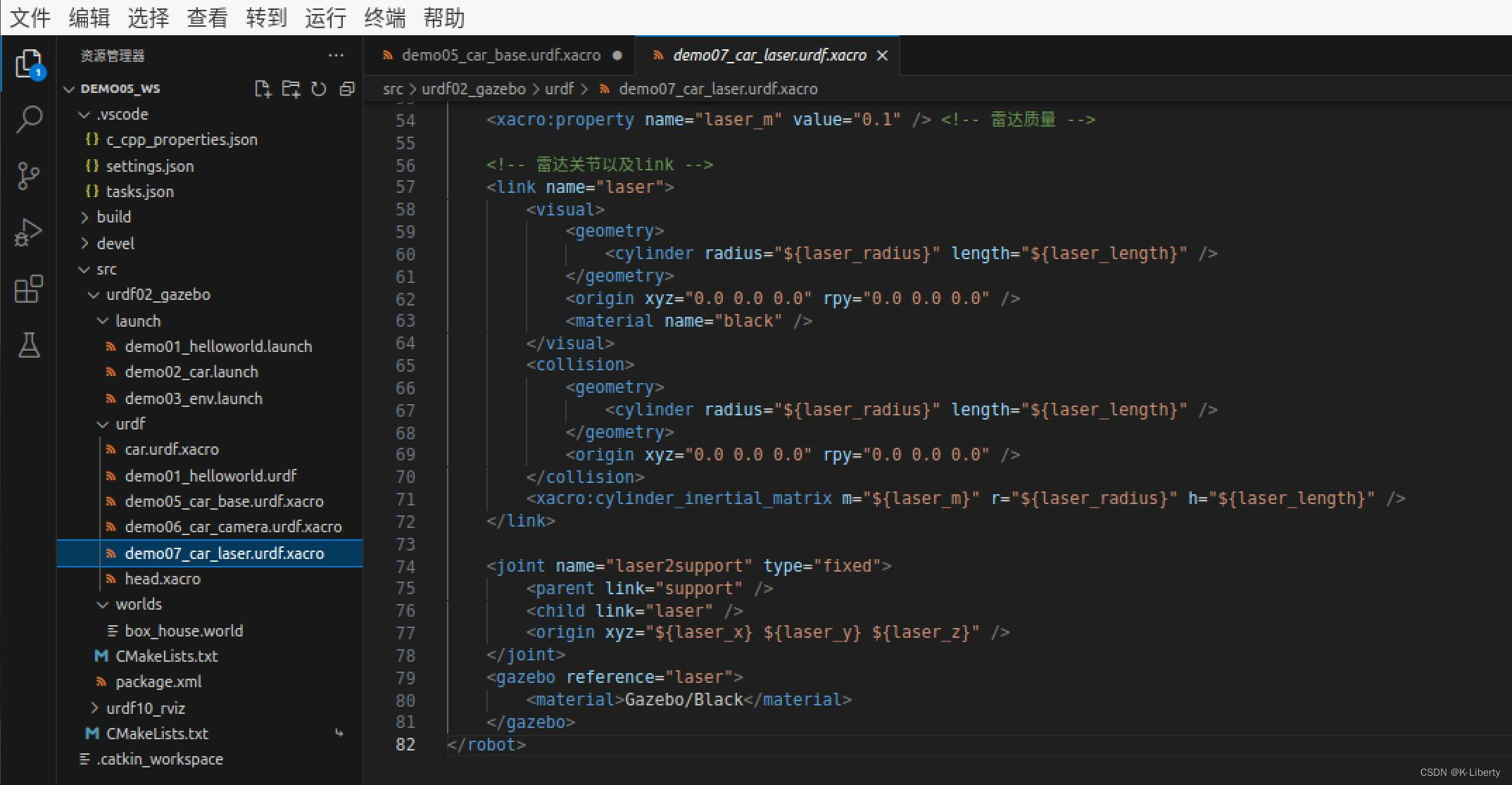
2、机器人模型中的每一个 link 添加 collision 和 inertial 标签,并且重置颜色属性
3、在 launch 文件中启动 gazebo 并添加机器人模型
其中的launch文件主要做了两项工作:
(1)启动机器人的状态发布节点,同时加载带有Gazebo属性的机器人URDF模型。
(2)启动Gazebo,并且将机器人模型加载到Gazebo仿真环境中。










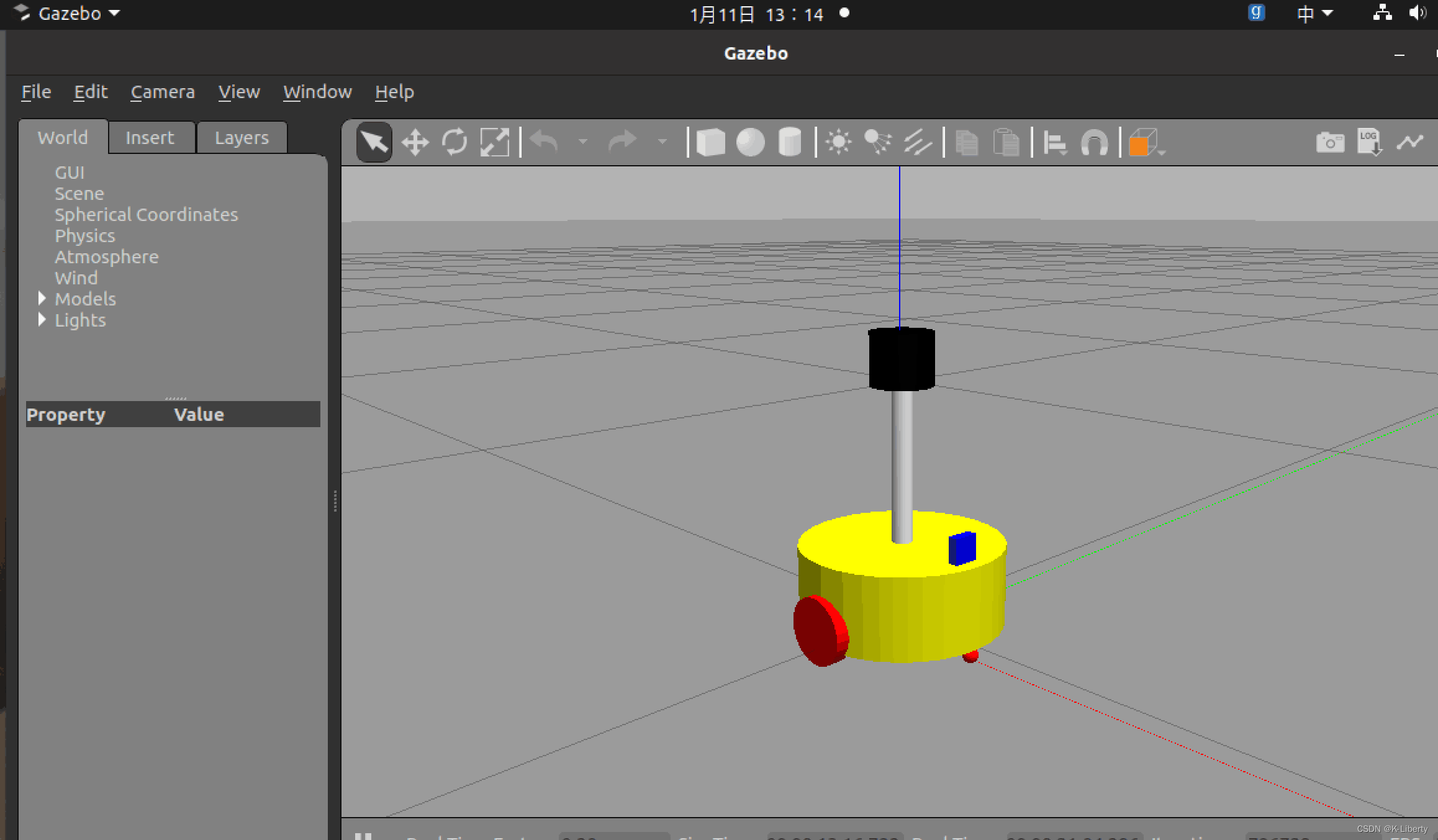
实现流程:
1、编写封装惯性矩阵算法的 xacro 文件
2、机器人模型中的每一个 link 添加 collision 和 inertial 标签,并且重置颜色属性
3、在 launch 文件中启动 gazebo 并添加机器人模型
其中的launch文件主要做了两项工作:
(1)启动机器人的状态发布节点,同时加载带有Gazebo属性的机器人URDF模型。
(2)启动Gazebo,并且将机器人模型加载到Gazebo仿真环境中。











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




















 1015
1015





