






10 特征向量与特征值
基变换回顾:不同视角下表示同一变换的方法
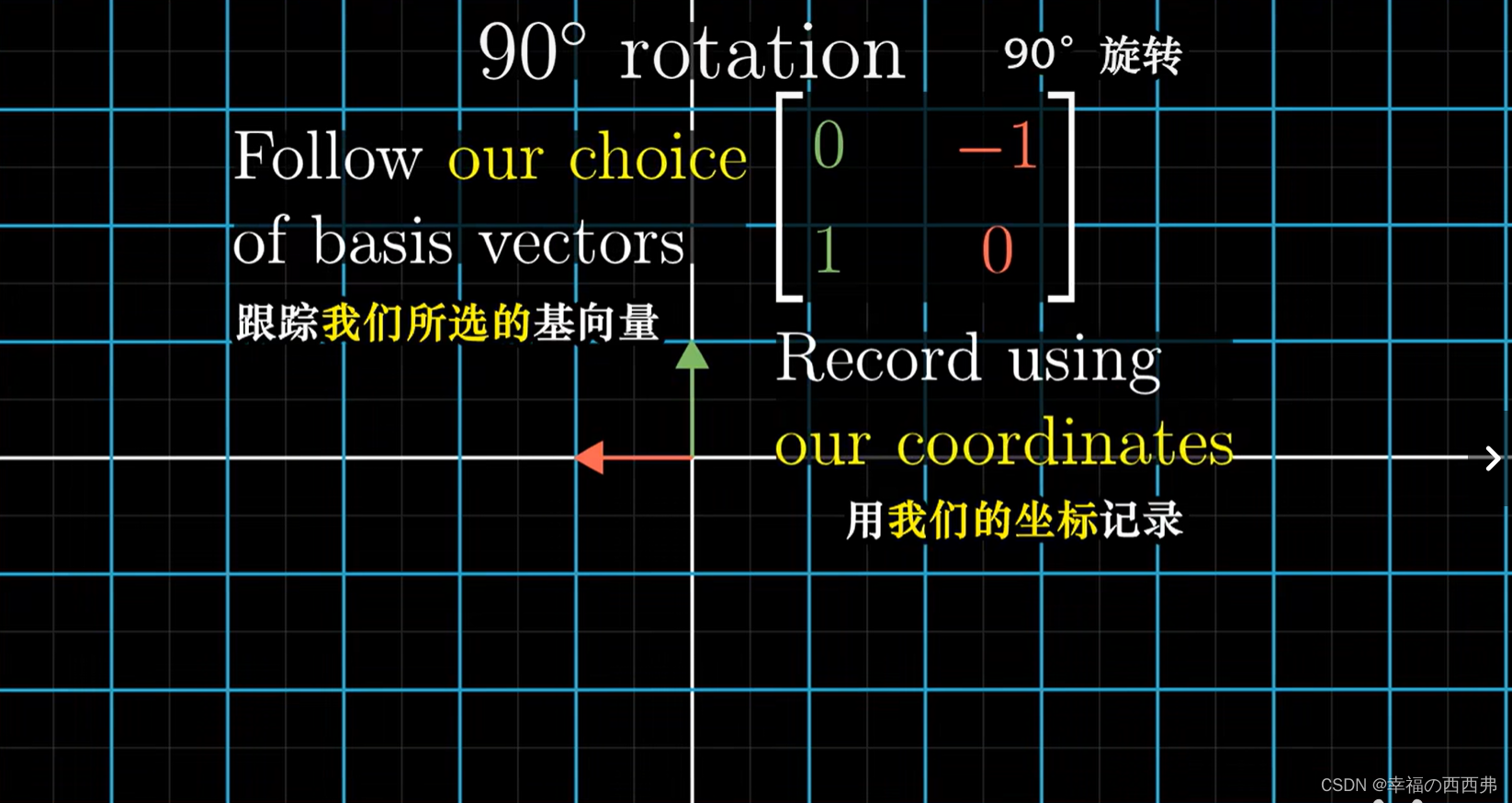
举个例子,如何在我们的坐标系下用矩阵表示逆时针旋转90°的变换?只需要一个矩阵。我们的做法是:跟踪在我们坐标系下的基向量,也就是说,我们的基向量本来是i=
和j=
,经过变换之后变为了
和
,跟踪我们所选的基向量i和j,用我们的坐标进行记录,就可以得到这个变换用矩阵表示的方式:
。
那么,假设你此时需要在另一个坐标系下,用这个坐标系自己的基向量表示逆时针旋转90°的变换,你该怎么写这个基变换矩阵呢?
不同视角下表示同一变换的实例
举一个简单的例子:
已知在我们自己原本的坐标系下,想要对一个向量完成逆时针旋转90°的变换,可以给让这个向量左乘矩阵M=,也就是说,T矩阵代表了在原坐标系视角下逆时针旋转90°的变换,这也就是上一个例子在解释的部分。
此时假设你有一个新的坐标系,这个新坐标系的基变换矩阵A=,在这个坐标系下,你有一个向量
=
,表示注意,此时
的坐标是用新坐标系下的方式表达的。此时我想对
实施逆时针旋转90°的操作,我该用哪个基变换矩阵左乘
呢?
想要完成这个转化,我们的逻辑是:
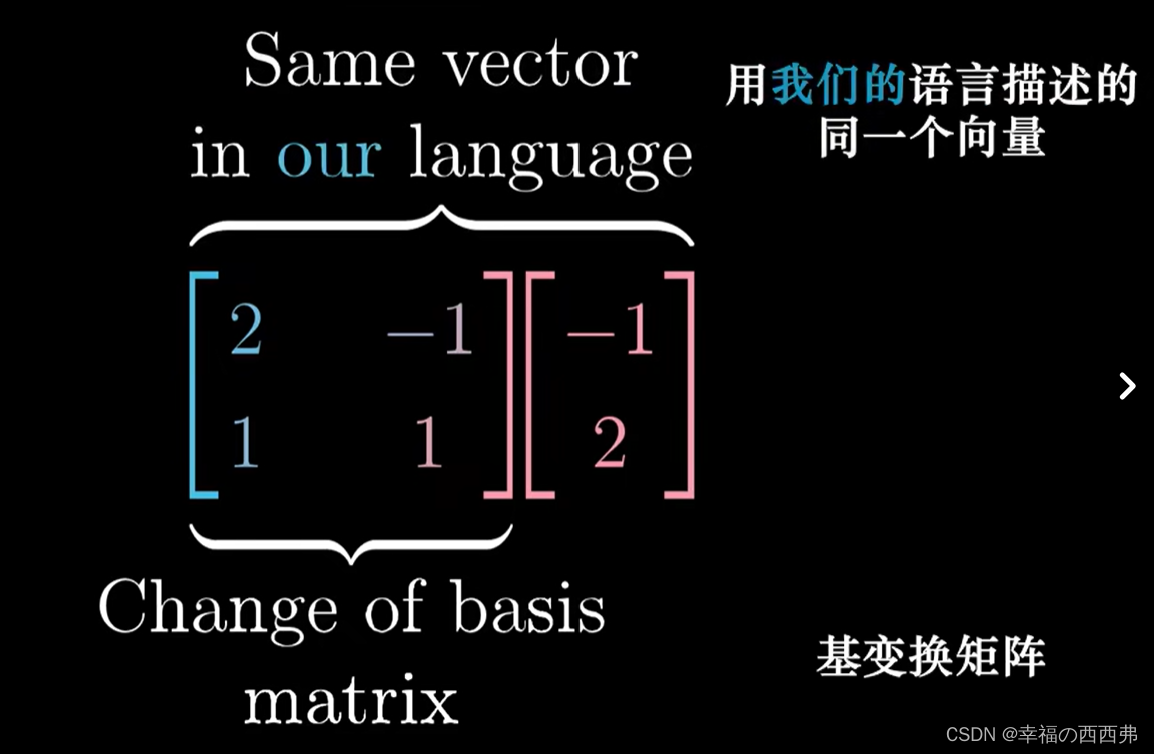
①得到“用我们语言描述的同一向量”(基变换)
用新坐标系的基变换矩阵对实施变换,得到
在我们自己原本的坐标系下的表达式,我们把这个表达式记为
,
=A×
=
;
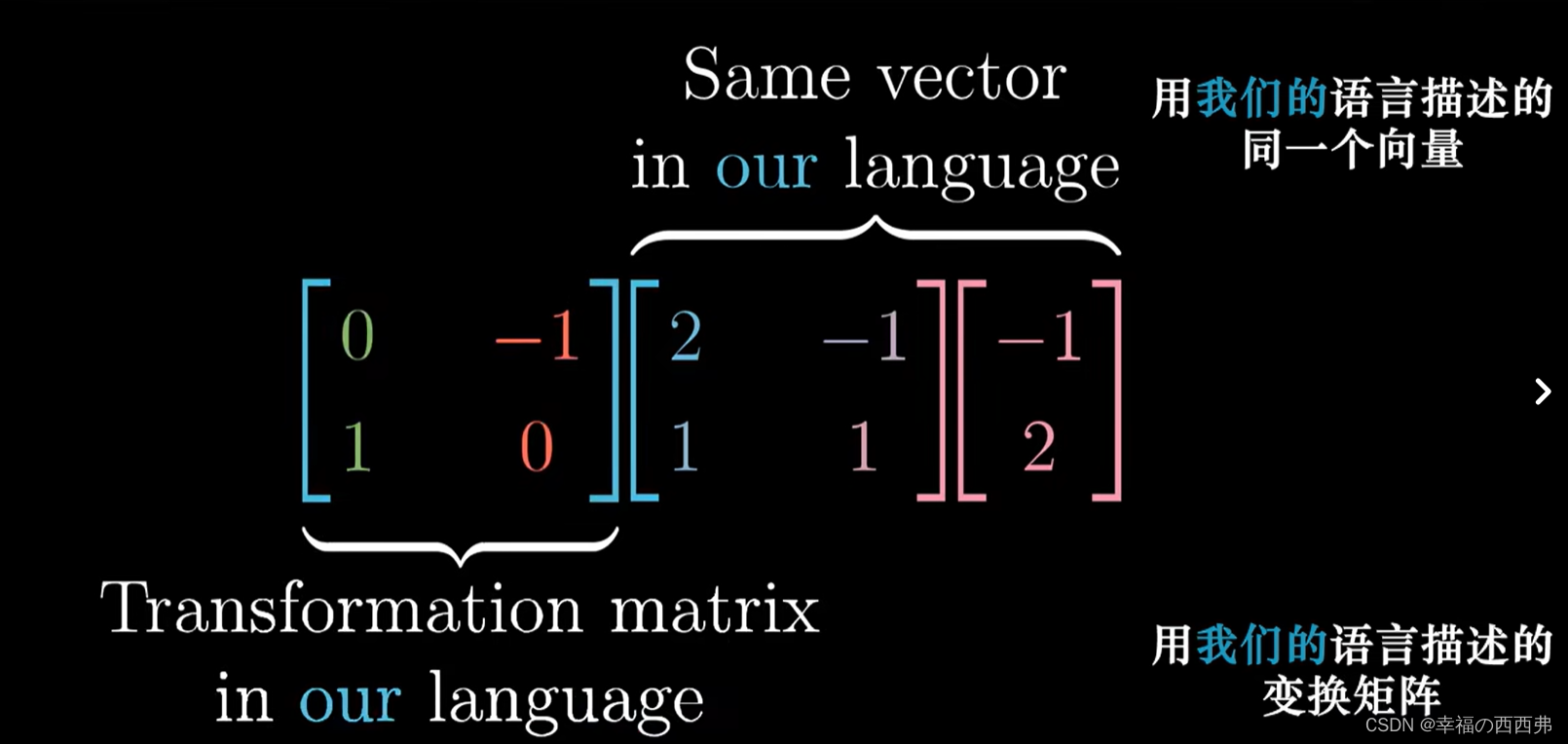
②对“用我们语言描述的同一向量”实施变换(线性变换)
对进行逆时针旋转90°的变换,具体做法是,用代表着“逆时针旋转90°”的基变换矩阵T左乘
。因为
是一个原坐标系下的向量表达,所以自然可以用原坐标系下的基变换矩阵T,去对它完成旋转操作,得到用原坐标系下语言描述的旋转后的向量
。此时的表达式可以写成:
=M×
=
;
是
逆时针旋转90°后得到的向量,并且是用原坐标系下的语言描述的;
③将描述语言转化成新坐标系下的语言(基变换的逆)
现在我们已经得到了逆时针旋转90°后得到的向量
,但问题在于,
是用原坐标系下的语言表达的,要想把
的表达式转化成新坐标系下的语言,我们就需要给
左乘上
,把原坐标系的语言,转化成新坐标系下的语言。此时我们就得到了用新坐标系下语言描述的旋转后的向量
,
=
×
=
;
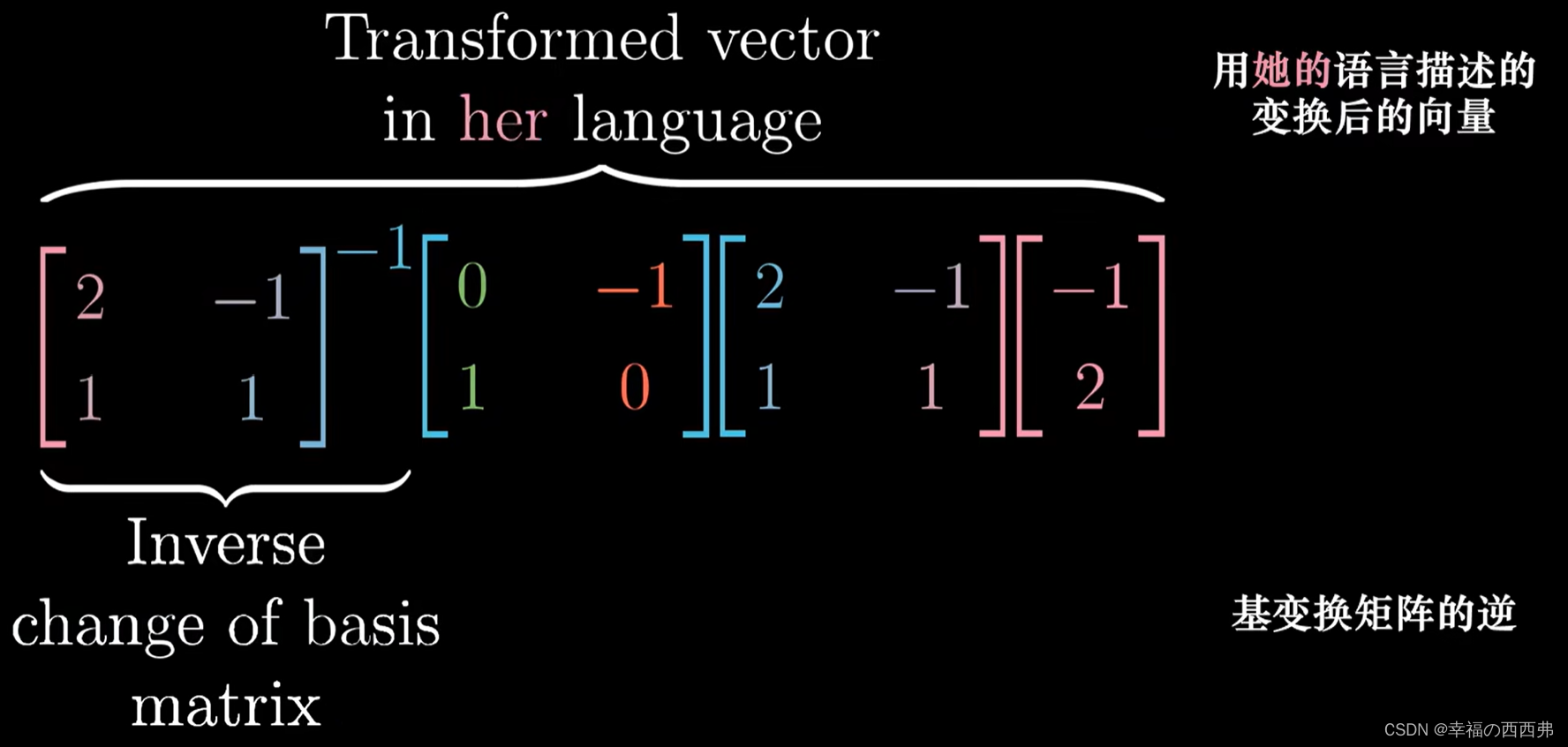
总结一下这个变换过程,即为:=(
)
相似矩阵
上述变换过程依次运用了三种变换:①基变换;②线性变换;③基变换的逆。写出这个变换过程的表达式:,结合上面的实例,这个表达式的含义是一种视角上的变化。
代表的矩阵变换和
代表的矩阵变换实际上是:同一个变换在不同坐标系下的不同表达。
这个表达式是否让你想起了相似矩阵的定义?
相似矩阵的定义:设A与B是n阶矩阵,若存在n阶可逆矩阵P,使得,则称矩阵A和B相似,记为A∽B。
所以A和B相似,实际上是在说A和B代表的是同一个变换,只不过A和B事用不同坐标系下的语言在描述而已,A代表着原坐标系语言描述下的变换,P为实现两个坐标系之间转化的过渡矩阵,B代表着新坐标系语言描述下的变换。这也就解释了:为什么相似矩阵A和B会有相同的特征值。















 1061
1061

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









