






什么是PID?
PID控制器:
- PID是比例(Proportion)、积分(Integration)、微分(Differentiation)控制的简称,是工业控制中应用最为广泛的调节器控制规律。
- PID控制器问世已有近70年历史,以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。
- 当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型时,PID控制技术因其方便性而被广泛采用。
- PID控制器根据系统的误差,利用比例、积分、微分计算出控制量进行控制,以达到系统的稳定和优化。
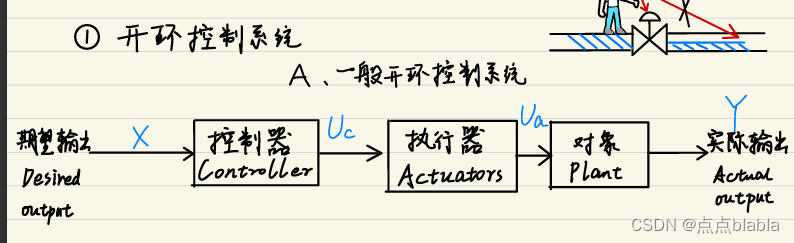
PID适用的控制系统
一般的开环控制系统:无法根据反馈进行控制
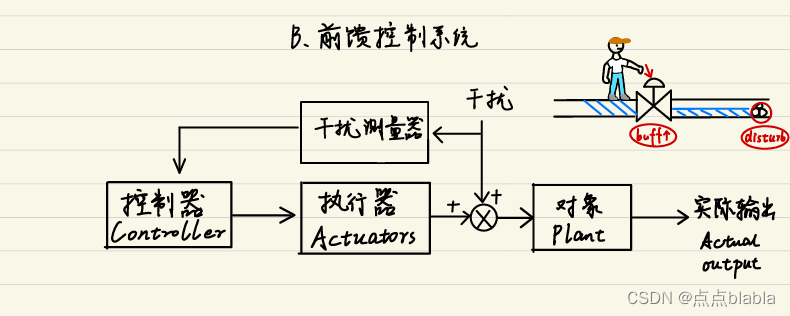
前馈控制系统可以在输出前避免干扰的影响,弥补干扰后再输出给对象
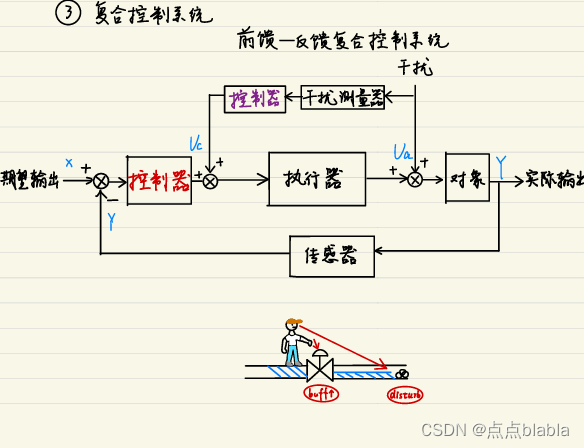
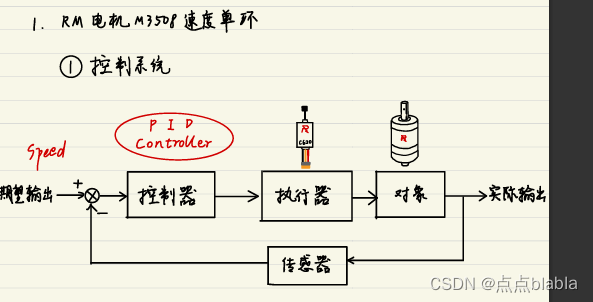
闭环控制系统
适用于PID调控,会实时的反馈误差,直至输出的数据达到理想值

连续向离散化的转化
了解PID的数学基础就是将连续性的数学表达式转化为离散性的数学表达式
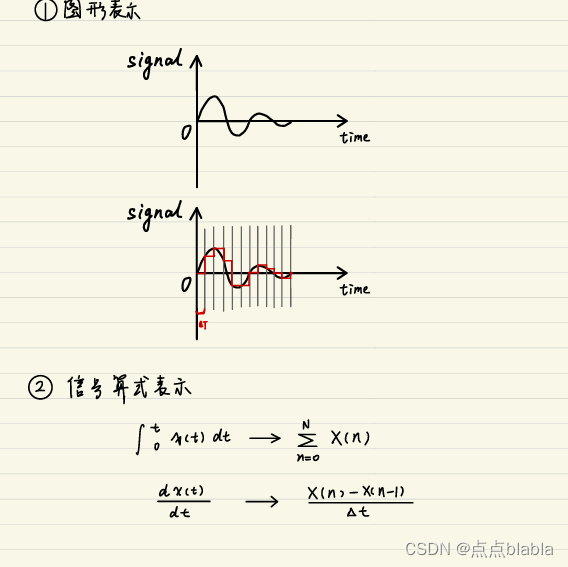
比如积分可以看作是信号量的累积
微分则可以看作信号量的变化率
PID公式的讲解
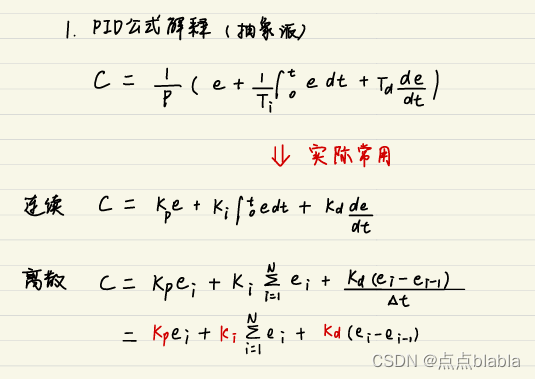
这里将比例系数、微分系数、积分系数全部抽象成了kp、ki、kd
这里还将连续性的微分积分表达式直接转化成了离散的数学表达式
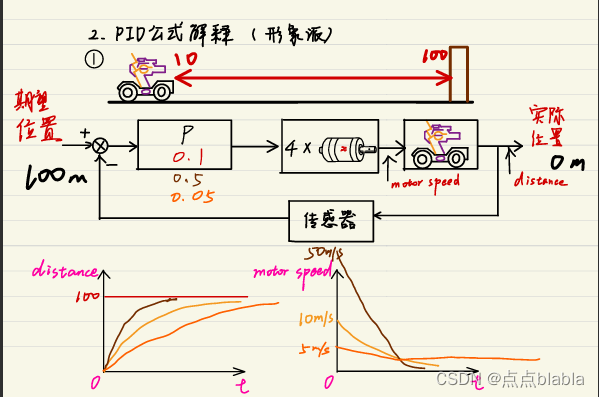
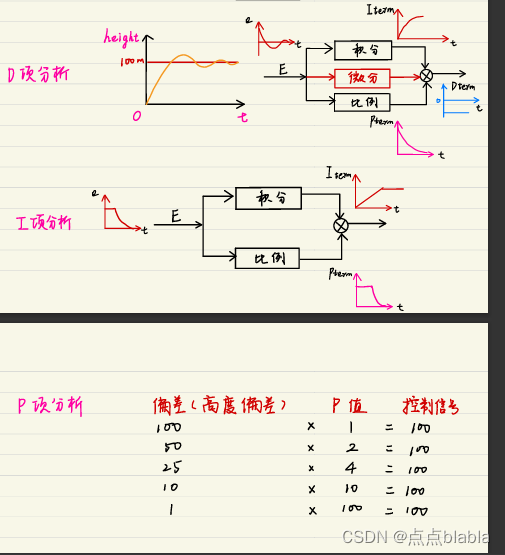
系数 KP对于系统的调控,KP越大,系统接近期望的时间越快。
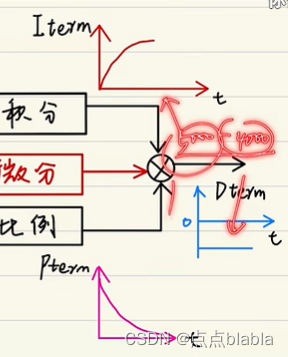
i项对系统调控的作用
由于积分项无法消除系统的稳态误差,只能无限的接近于期望值,所以需要加入积分项来调控,积分项系数会随误差e的存在而持续积累增大
同时,i项不会因为误差的消失而失去控制,能恒定的控制消除系统的稳态误差。
d项通过给上负的系数,抵消i项,避免系统发生超调。
PID的参数整定:
KP从小往大调,调大接近贴合时,调KI,从小往大调,如果出现超调,再调KD。
其他控制知识
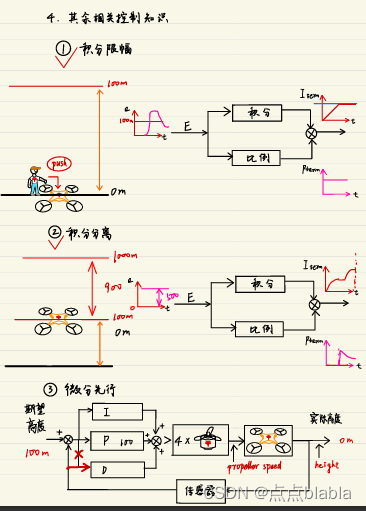
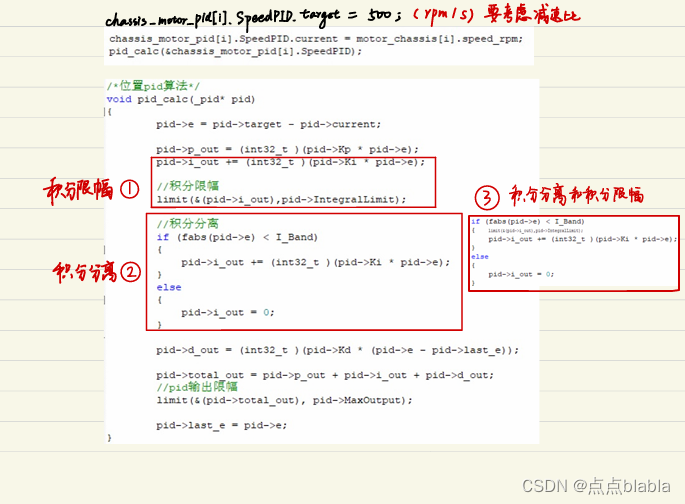
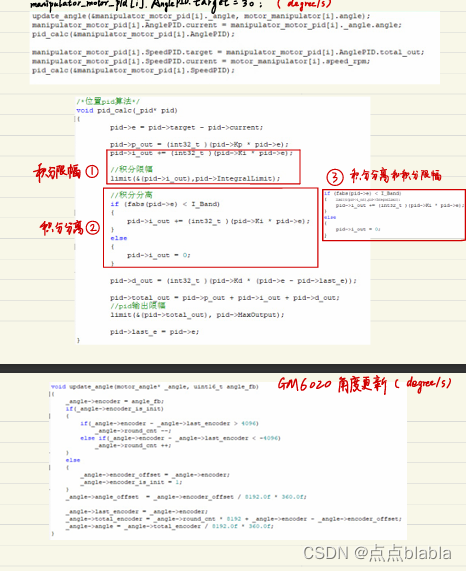
积分限幅:给误差一个极限值,使其达到极限值后不再积累->对应的积分项也不会累积。
积分分离:在误差小于某个值时计算积分项,在误差大于某个值时积分项为0.
微分先行:避免系数D由于IP调节的变化发生较大的变化,为了稳定性,将D项先进行运算。

















 2905
2905

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









