






一、电机的基本知识
1.通过电磁感应定律,将电能转化为机械能,并使用机械能产生动能的设备。
2.分类:a. 直流电机(DC)、交流电机(AC)、交直流两用电机(Universal)
b.有刷直流电机(BDC)、无刷直流电机(BLDC)
二、直流电机以及arduino驱动直流电机的方法
1.主要参数:
额定电压、电流
空载转速(电机不带任何负载的转速)
2.控制:
a.控制对象主要是输出轴的旋转方向(H桥电路闭合开关)和旋转速度(PWM控制)
b.控制电机的法一:H桥电路(需要焊接电路,不太方便)
H桥电路闭合开关改变旋转方向;利用arduino控制开关闭合的时间长短/使得电机两端电压为pwm模式/从而达到改变旋转速度的效果
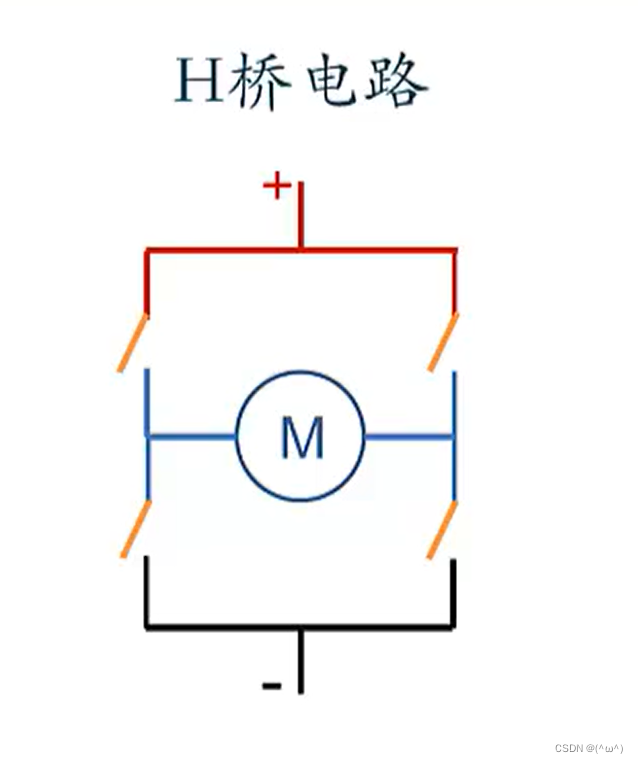
(设闭合左上和右下的开关,输出轴旋转方向为顺时针;则闭合右上和左下,输出轴旋转方向为逆时针)(即:改变流过电机的电流方向即可实现改变旋转方向)
c.控制方法二:使用电机控制模块(简单、方便)
买对应模块时要注意电机控制模块的电源与电机的额定电压、电流是否相匹配、合适;
查看控制模块的引脚信息--这样自己写程序的时候才知道要设置哪些引脚为高电平或低电平
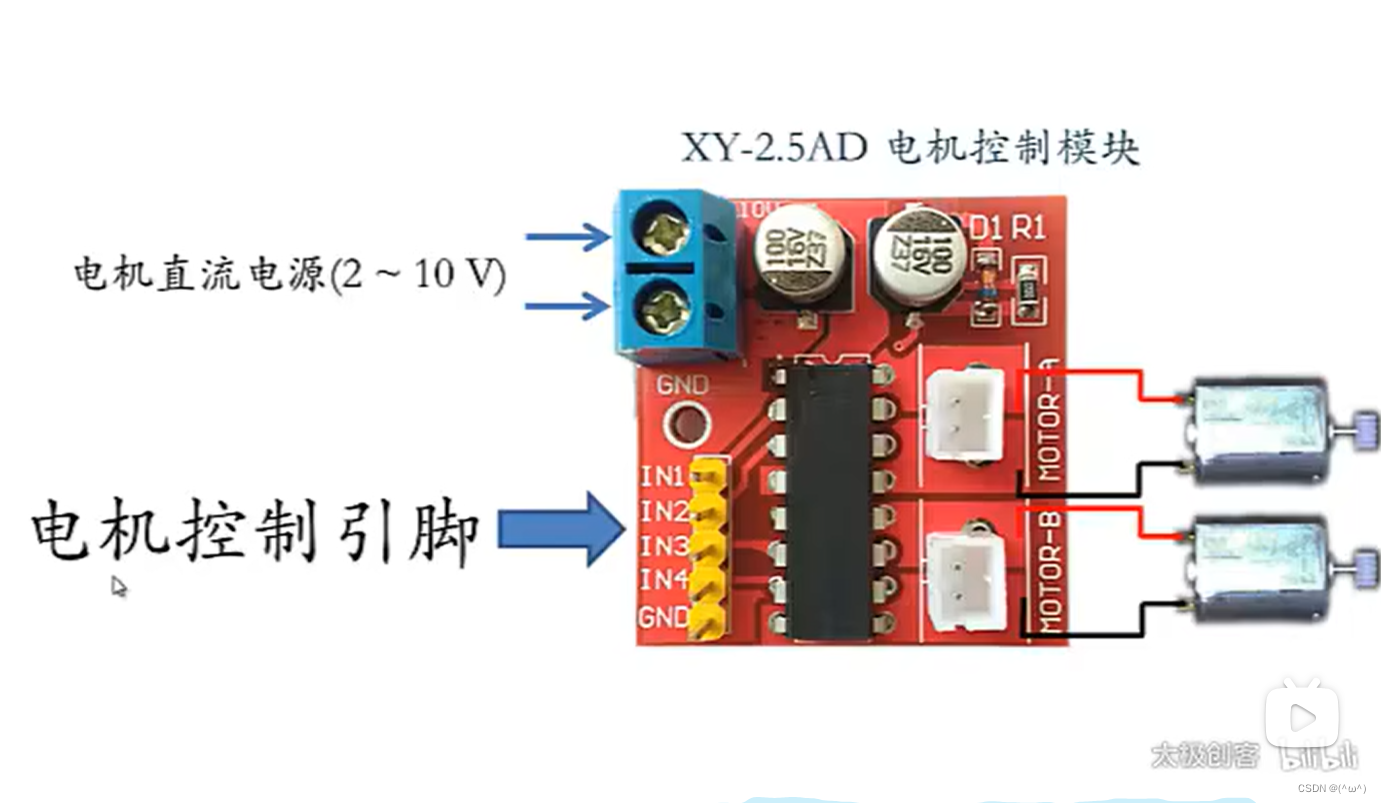
电机控制模块的相关引脚的介绍
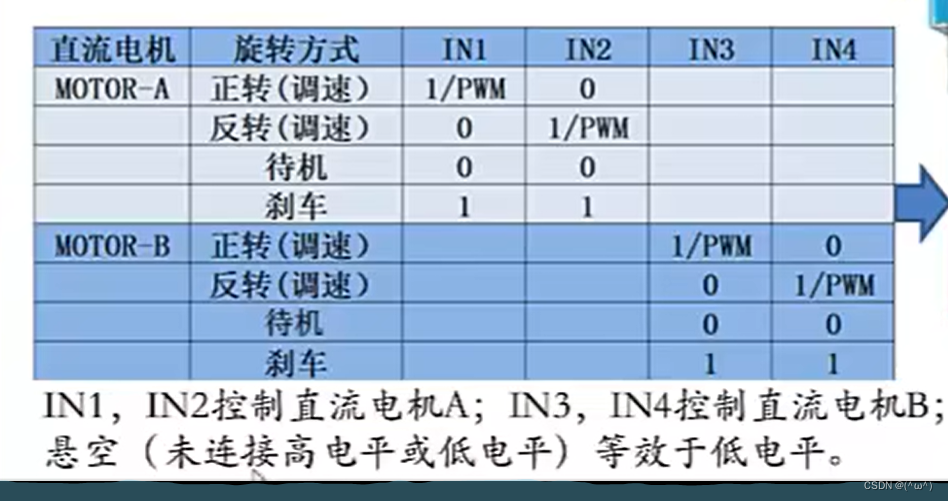
利用arduino设置引脚状态实现电机的不同状态
三、步进电机的基本原理及控制
1.分类:单极性步进电机、双极性步进电机
2.对应的原理:

(中间一直接电源正极不会改变,通过改变接地的位置,产生不同的磁场,从而使转子发生转动)

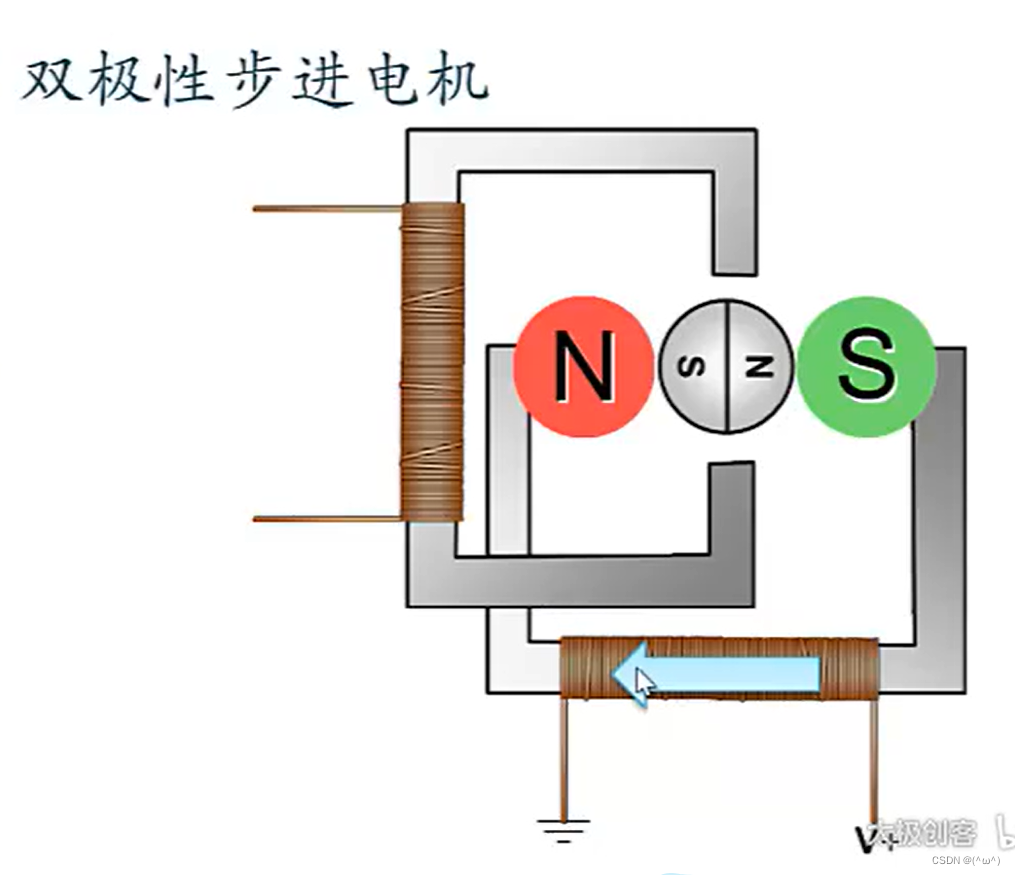
(交替改变线圈的电极性,使得转子不停的转动)
3.比较: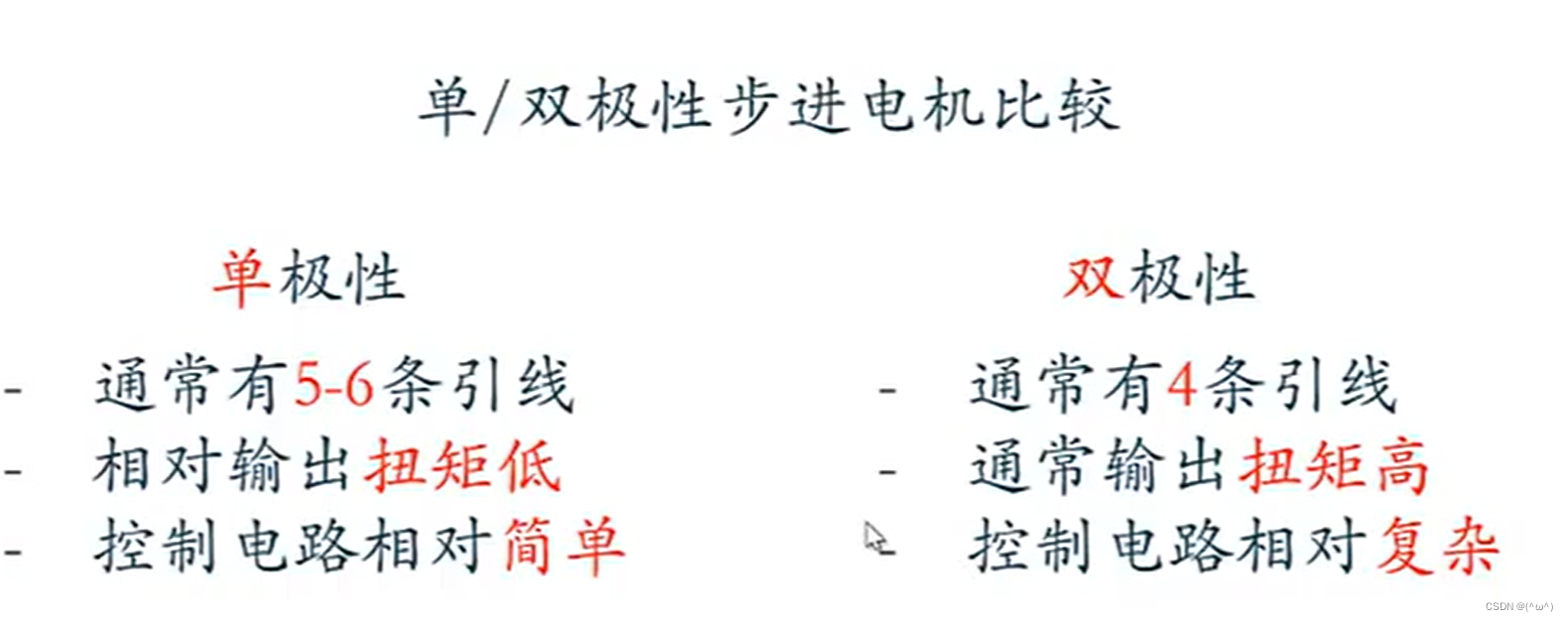
4.反应式步进电机(下次我还是看视频吧。。。)
四、arduino控制步进电机用到的库:Stepper库、AccelStepper库
五、Stepper库里面的函数
注意:只能控制一个电机,不能同时控制两个或以上个电机。同时在使用Arduino官方stepper库时,Arduino开发板在控制步进电机的过程中是无法进行其它工作的。
a.Stepper(steps,pin1,pin2,pin3,pin4)
作用:建立步进电机对象。
steps:电机内部转子转一周的步数;
pin1:电机控制模块in1与arduino连接的引脚;
pin2:in3与arduino连接的引脚;
pin3:in2与arduino连接的引脚;
(没有错,就是这样,pin2位置放的就是in3的,pin3放的就是in2的)
piin4:in4与arduino连接的引脚。
举例:Stepper steppermotor(32,8,10,9,11)
解释:建立一个名为steppermotor的电机,其基本信息为括号的内容。(电机旋转一周需要走32步,电机控制模块上的in1、in2、in3、in4分别与arduino的引脚8、9、10、11相连)
b.setSpeed(rpm)
作用:设置步进电机运行速度(每分钟转数)。(此函数无法让电机旋转,只用于设置转速。如要让电机旋转,需要使用step函数。)
rpm:电机每分钟转速
c.step(steps)
作用:通过step函数您可以让步进电机旋转相应的步数。(旋转速度则由 setSpeed函数决定。)
steps:电机运行的步数。
注意:此函为“blocking”类型函数,即Arduino在运行此函数时,将会等待电机执行完运行要求以后才会执行下一条语句。举例说明,假如您通过setSpped函数设置电机的运行速度为1。然后通过调用step(100)指令让电机运转100步。这一操作的执行时间可能要一分多钟才能完成。为了让程序可以更好的运行,建议每一次调用step函数时尽量让电机少执行步数,同时提高电机的运行速度。
六、AccelStepper库里面的函数
定义步进电机对象:AccelStepper(a,pin1,pin2,pin3,pin4)
a 表示电机的步进方式(全步进、半步进、四分之一步进......)
pin2为in3与arduino连接的引脚;
pin3为in2与arduino连接的引脚;
举例:AccelStepper stepper1(HALFSTEP, motor1Pin1, motor1Pin3, motor1Pin2, motor1Pin4);
解释:定义一个名为stepper1的步进电机,步进方式为半步进,电机控制模块的in1、in2、in3、in4分别与单片机上的motor1Pin1、motor1Pin2、motor1Pin3、motor1Pin4相连。
a.setMaxSpeed -设置步进电机最大运行速度
b.setAcceleration -设置步进电机加速度
c.setSpeed -设置步进电机运行速度
d.targetPosition -获取步进电机运行目标位置
e.currentPosition -获取步进电机运行当前位置
f.setCurrentPosition -复位步进电机初始位置
g.move – 设置步进电机运动的相对目标位置
h.moveTo -设置步进电机运动的绝对目标位置
i.run -步进电机运行(先加速后减速模式)
j.runSpeed -步进电机运行(匀速模式)
k.runToNewPosition – 电机运行到用户指定位置值,目标位置为绝对位置。此函数将“block”程序运行。即电机没有到达目标位置前,Arduino将不会继续执行后续程序内容。这一点很像Arduino官方Stepper库中的step函数。















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









