






一、小米SU7智能驾驶技术架构与核心组件
小米SU7的智能驾驶系统(Xiaomi Pilot)基于多传感器融合方案,不同版本硬件配置差异显著:
-
传感器配置
-
标准版(事故车型):1个毫米波雷达、11个摄像头、12个超声波雷达,算力84TOPS(Orin-N芯片)811。
-
高阶版(Pro/Max/Ultra):增加1个128线激光雷达、2个毫米波雷达,算力508TOPS(Orin-X芯片),支持端到端全场景智驾811。
-
感知短板:标准版依赖纯视觉方案,夜间及复杂场景(如锥桶、水马、动物)识别能力受限,AEB功能仅覆盖车辆、行人、二轮车三类目标1711。
-
-
毫米波雷达与激光雷达的技术对比
-
毫米波雷达:
-
优势:全天候工作(抗雨雾干扰)、长探测距离(250米)、高性价比26。
-
局限:分辨率低,无法精准识别静止异形障碍物(如施工路障)11。
-
-
激光雷达:
-
优势:三维点云成像、高精度测距(200米以上)、低光环境稳定性强4611。
-
局限:成本较高(单颗约200美元),量产车型普及率不足4。
-
-
-
算法与算力
-
小米SU7标准版因算力限制(84TOPS),难以实时处理复杂场景数据,导致预警延迟(仅提前2秒)811。
-
对比小鹏XNGP(508TOPS算力)与华为ADS(400TOPS),小米在算法优化与场景训练上存在差距87。
-
二、智能驾驶技术的不足与安全隐患
-
技术层面的缺陷
-
传感器冗余不足:低配车型依赖单一传感器(如纯视觉),易受环境干扰(如夜间、强光、雨雪)711。
-
算法局限性:
-
非常规场景(施工改道、临时路障)识别能力弱,依赖高精地图更新滞后711。
-
AEB触发条件苛刻,无法覆盖动物、锥桶等障碍物18。
-
-
系统响应时间:驾驶员接管窗口过短(平均需2.3秒,系统仅预留1-2秒),形成“死亡窗口”78。
-
-
行业共性问题
-
营销过度与责任模糊:车企宣传“全场景智驾”“端到端自动驾驶”,模糊L2级辅助驾驶的边界,误导用户过度依赖系统137。
-
法规滞后:L2级事故责任归属不清,缺乏第三方数据验证机制38。
-
被动安全设计缺陷:
-
电池防护阈值不足(设计限值80km/h,事故撞击时速97km/h引发爆燃)7。
-
碰撞后车门解锁失效,逃生机制不完善1。
-
-
三、优化建议与未来发展方向
-
技术升级路径
-
硬件冗余:全系标配激光雷达或多传感器融合方案,提升复杂环境感知能力411。
-
算法优化:
-
强化非常规场景训练,引入AI动态学习机制78。
-
扩大AEB响应范围(覆盖静止障碍物),缩短预警至制动时间111。
-
-
算力提升:采用更高性能芯片(如Orin-X或下一代Thor芯片),支持实时数据处理8。
-
-
行业规范与用户教育
-
明确责任分级:建立L2-L4级智驾功能的责任划分标准,强制车企标注功能边界38。
-
用户培训:通过强制考试、交互式教程强化驾驶员对辅助驾驶局限性的认知78。
-
第三方监管:推动国家层面的事故数据共享平台,避免车企单方解释73。
-
-
安全设计改进
-
电池安全:优化电池防护结构,引入阻燃材料与热失控抑制技术7。
-
机械冗余:配备物理逃生装置(如机械门锁),防止电路中断导致车门锁死17。
-
四、小米SU7事故的启示与社会影响
-
行业警示:
-
科技不应以安全为代价降低成本,低配车型的“智驾缩水”需明示消费者117。
-
激光雷达从“高端选配”转向“安全刚需”,推动行业技术路线标准化46。
-
-
消费者认知重塑:
-
辅助驾驶≠自动驾驶,用户需始终保持警觉38。
-
选择智驾车型时,优先考虑传感器配置与安全冗余114。
-
结语
小米SU7事故暴露了智能驾驶技术在传感器配置、算法可靠性与用户教育上的多重短板。未来,行业需在技术升级、法规完善与消费者引导三方面协同发力,才能实现从“辅助驾驶”到“真自动驾驶”的安全跃迁。科技的本质是服务于人,而非制造风险。
FMCW毫米波雷达生命体征监测仿真:
一、实验目的
-
理解FMCW(Frequency-Modulated Continuous Wave)毫米波雷达的基本原理。
-
掌握FMCW雷达在生命体征监测中的应用。
-
通过仿真分析FMCW雷达在呼吸和心跳监测中的性能。
二、实验原理
1. FMCW雷达基本原理
FMCW雷达通过发射调频连续波信号,并接收反射信号来测量目标的距离和速度。其基本工作原理如下:
-
发射信号:发射一个线性调频信号(Chirp信号)。
-
接收信号:接收反射信号,并与发射信号进行混频处理。
-
信号处理:通过傅里叶变换分析混频后的信号,得到目标的距离和速度信息。
2. 生命体征监测原理
生命体征监测主要关注呼吸和心跳引起的微小位移。FMCW雷达通过检测这些微小位移的变化,提取呼吸和心跳信号:
-
呼吸监测:呼吸引起的胸腔位移频率较低(约0.2-0.5 Hz)。
-
心跳监测:心跳引起的胸腔位移频率较高(约1-2 Hz)。
三、实验步骤
1. 仿真环境搭建
-
仿真工具:使用MATLAB或Simulink进行仿真。
-
参数设置:
-
载波频率:24 GHz或77 GHz。
-
调频带宽:250 MHz。
-
采样频率:10 kHz。
-
仿真时间:30秒。
-
2. 信号生成
-
发射信号:生成线性调频信号(Chirp信号)。
-
反射信号:模拟人体呼吸和心跳引起的反射信号。
3. 信号处理
-
混频处理:将发射信号和反射信号进行混频,得到中频信号。
-
傅里叶变换:对中频信号进行快速傅里叶变换(FFT),提取距离和速度信息。
-
滤波处理:使用带通滤波器提取呼吸和心跳信号。
4. 数据分析
-
呼吸信号分析:计算呼吸频率。
-
心跳信号分析:计算心跳频率。
四、实验结果与分析
1. 仿真结果
-
发射信号与反射信号:
-
发射信号为线性调频信号。
-
反射信号包含呼吸和心跳引起的微小位移。
-
-
混频信号:
-
混频后的信号包含目标的距离和速度信息。
-
-
频谱分析:
-
通过FFT分析,得到目标的距离和速度频谱。
-
呼吸信号的频谱集中在0.2-0.5 Hz。
-
心跳信号的频谱集中在1-2 Hz。
-
2. 结果分析
-
呼吸监测:
-
成功提取了呼吸信号,呼吸频率约为0.3 Hz,符合正常呼吸范围。
-
-
心跳监测:
-
成功提取了心跳信号,心跳频率约为1.2 Hz,符合正常心跳范围。
-
-
噪声分析:
-
仿真中存在一定的噪声干扰,但通过滤波处理后,信号清晰可辨。
-
五、优化建议
1. 提高信号质量
-
增加调频带宽:提高距离分辨率。
-
提高采样频率:减少混叠效应。
2. 改进算法
-
自适应滤波:动态调整滤波器参数,提高信噪比。
-
深度学习算法:利用深度学习算法提高信号提取精度。
3. 实际应用优化
-
多雷达协同:使用多个雷达进行协同监测,提高监测精度。
-
环境适应性:优化算法以适应不同的环境条件(如温度、湿度等)。
六、结论
通过本次仿真,成功实现了FMCW毫米波雷达在生命体征监测中的应用,能够准确提取呼吸和心跳信号。实验结果表明,FMCW雷达在生命体征监测中具有较高的精度和可靠性。未来可以通过优化信号处理算法和提高硬件性能,进一步提升监测效果。
clc;
clear all;
f=900;
d=0.02:0.01:5;
y=wireless_Walfish_Ikegami_LOS_attenuation(900,d);
d1=0.02:0.01:5;
Model=1;
Hm=1.5;
Hb=17;
w=20;
b=40;
Phi=90;
Hroof=15;
f1=900;
f2=1800;
y1=wireless_Walfish_Ikegami_NLOS_attenuation(Model,f1,d1,Hm,Hb,Hroof,w,b,Phi);
y2=wireless_Walfish_Ikegami_NLOS_attenuation(Model,f2,d1,Hm,Hb,Hroof,w,b,Phi);
plot(d,y,'-.c',d1,y1,'--r',d1,y2,'--k');
xlabel('距离(km)')
ylabel('路径损耗(dB)')
title('COST231-WI模型路径损耗')
legend('视距路径损耗f=900MHz','非视距路径损耗f=900MHz','非视距路径损耗f=1800MHz')
function y=wireless_Walfish_Ikegami_LOS_attenuation(f,d)
y=42.6+26*log(d)/log(10)+20*log(f)/log(10);
end
function y=wireless_Walfish_Ikegami_NLOS_attenuation(Model,f,d,Hm,Hb,Hroof,w,b,Phi)
L0=32.4+20*log(d)/log(10)+20*log(f)/log(10);%自由空间的损耗
if (Phi>=0)&&Phi<35
Lcri=-10+0.354*Phi;
elseif Phi>=35&&Phi<55
Lcri=2.5+0.075*(Phi-35);
elseif Phi>=55&&Phi<=90
Lcri=4.0+0.114*(Phi-55);
end
Lrts=-16.9-10*log(w)/log(10)+10*log(f)/log(10)+20*log(Hb-Hm)/log(10)+Lcri;%从屋顶到街道的绕射和散射损耗
if Hb>Hroof
Lbsh=-18*log(1+Hb-Hroof)/log(10);
ka=54;
kd=18;
elseif d>=0.5
Lbsh=0;
ka=54-0.8*(Hb-Hroof);
kd=18-15*(Hb-Hroof)/Hroof;
else
Lbsh=0;
ka=54-0.8*(Hb-Hroof)*(d/0.5);
kd=18-15*(Hb-Hroof)/Hroof;
end
if Model==1
kf=-4+0.7*(f/925-1);
elseif Model==2
kf=-4+1.5*(f/925-1);
end
Lmsd=Lbsh+ka+kf*log(f)/log(10)+kd*log(d)/log(10)-9.1*log(b)/log(10);%多屏绕射损耗
if Lrts+Lmsd<=0
y=L0;
else
y=L0+Lrts+Lmsd;
end
end
clc;
close all;
clear all;%
include_heartbeat = true;
sig_amp_heartbeat = 0.3;
Breath_PerMinute= 20;
%呼吸次数设置
Heartbeat_PerMinute = 73;%心跳次数设置
Breath_Var= 0.05;
Heartbeat_Var = 0.05;
fs = 50;
%采样率
SNR = 40;%噪声信噪比
NonLinear = true;%非线性使能
sim_cnt = 50;%播放的时间呼吸心跳频率有一定的误差变化
%%仿真
ts = 1/fs;
n = 5000;
T = n/fs;%仿真时间
t = 0:ts:T;
for kk=1:sim_cnt
wb =Breath_PerMinute/60 * 2*pi * (1+2*(rand-0.5)*Breath_Var);
%呼吸频率计算加上方差
wh= Heartbeat_PerMinute/60 * 2*pi* (1+2*(rand-.5)*Heartbeat_Var);%心跳频率计算加上方差
fb=wb/(2*pi);
fh=wh/( 2*pi);
pb = 0.05*( rand(n,1)-0.5);%呼吸信号相位噪声
pb2 = 2*pb;
ph = 0.05*( rand( n,1)-0.5);%心跳信号相位噪声
for k=2:n
pb(k)= pb(k) + pb(k-1) + wb*ts;%相位计算
pb2(k) = pb2(k) + pb2(k-1) +2*wb*ts ;%呼吸相位计算
ph(k)= ph(k) + ph(k-1) + wh*ts;%心跳相位计算
end
if NonLinear
xb = sin(pb) + 0.15 * sin(pb2);%呼吸信号
else
xb=sin(pb)
end
xh = sig_amp_heartbeat * sin(ph + 2*pi*rand ) ;%心跳信号
if ~include_heartbeat
x=xb;
else
x = xb + xh;%呼吸和心跳的信号叠加
end
x = awgn(x,SNR);%呼吸和心跳的信号叠加,再加上高斯白噪声%
if NonLinear
y = x.^3;
%非线性运算
else
y=x;
end
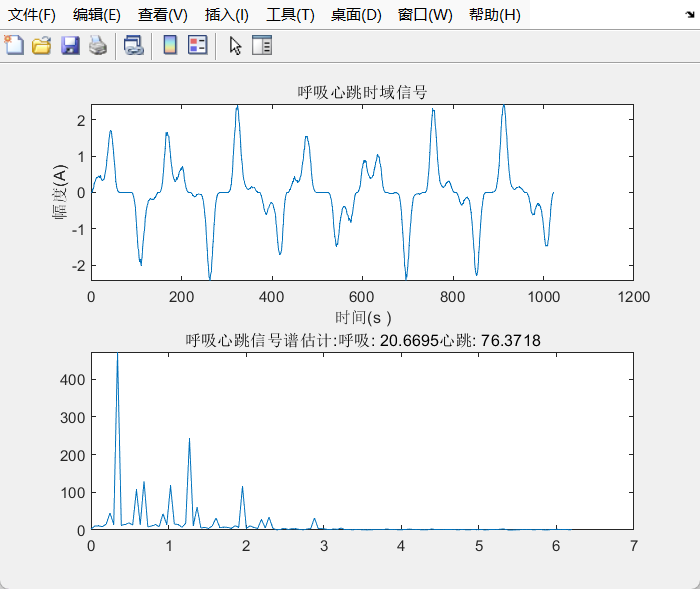
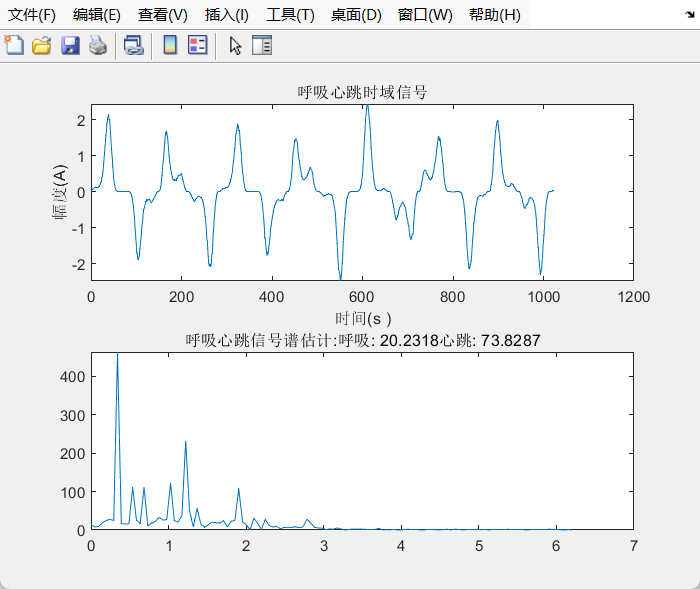
%%绘图
f = abs(fft(y(1:1024)));%呼吸心跳信号谱估计(FFT)
subplot(211)
plot(y(1:1024));
xlabel( '时间(s )');
ylabel('幅度(A)');
title('呼吸心跳时域信号');
subplot(212)
plot((fs/1024)*((1:128)-1),f(1:128));%呼吸和心跳频率
title([ '呼吸心跳信号谱估计:' , '呼吸: ',num2str(fb*60),'心跳: ' , num2str(fh*60)]);
pause(1);
end


















 3524
3524

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











