






1、认识单极性和双极性步进电机
简明扼要不废话:如图所示
单极性,就是有一个公共端,接VCC 总共5根线。
电流方向不能变,比如A低电平,B低电平。
双极性:
与单极性最大的区别:就是电流方向可变。通过电流方向控制磁场方向。
比如可以A+ > A- 也可以A- > A+,这样就通过电流方向(高低电平)来控制方向。
市面我们使用的大部分是双极性,
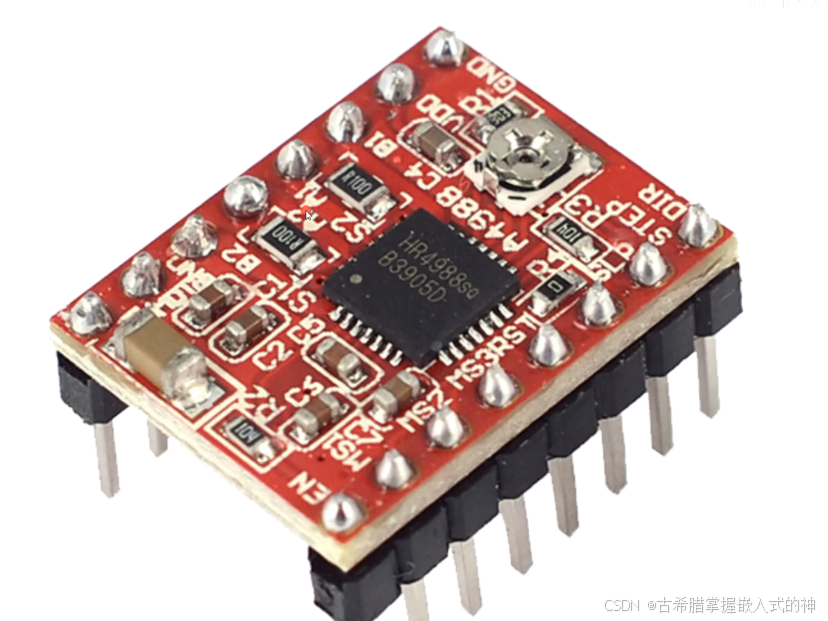
比如使用TB6600驱动,就有 A+ A-,B-B+ 四个项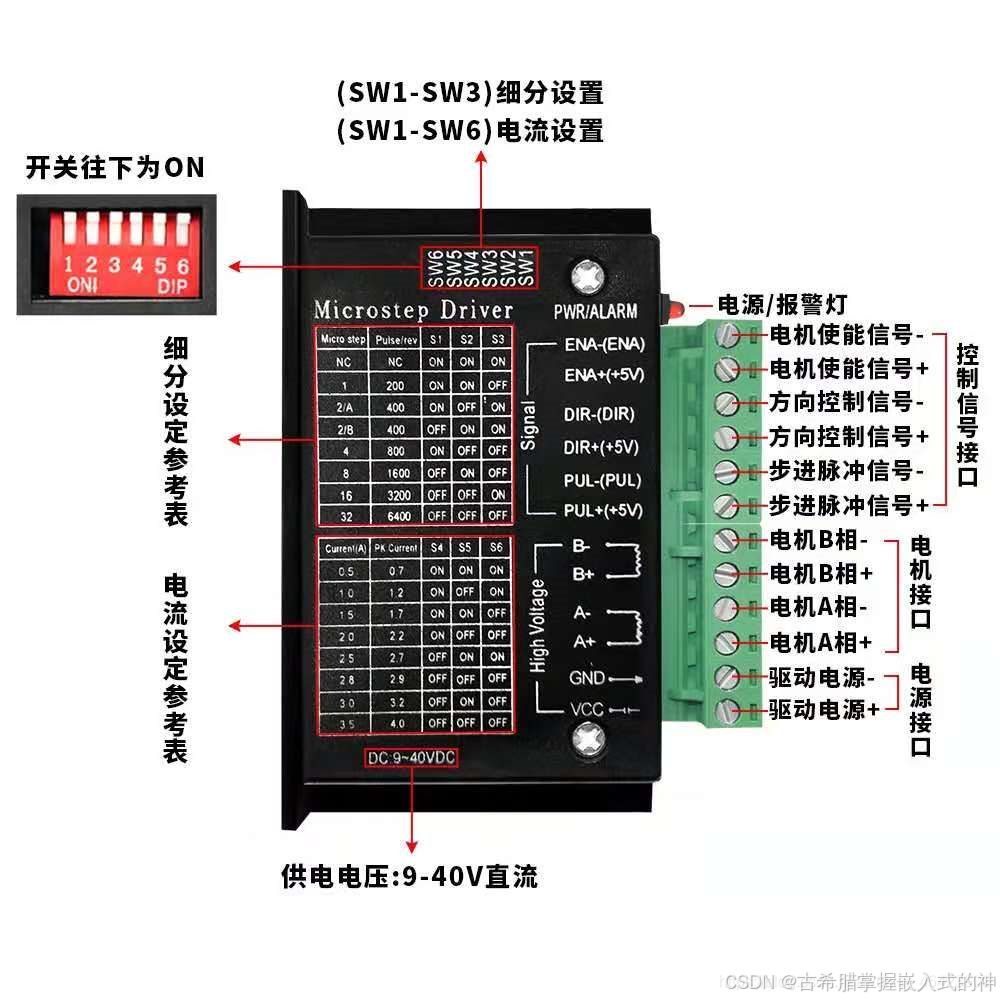
2、驱动两种步进电机
1、单极性
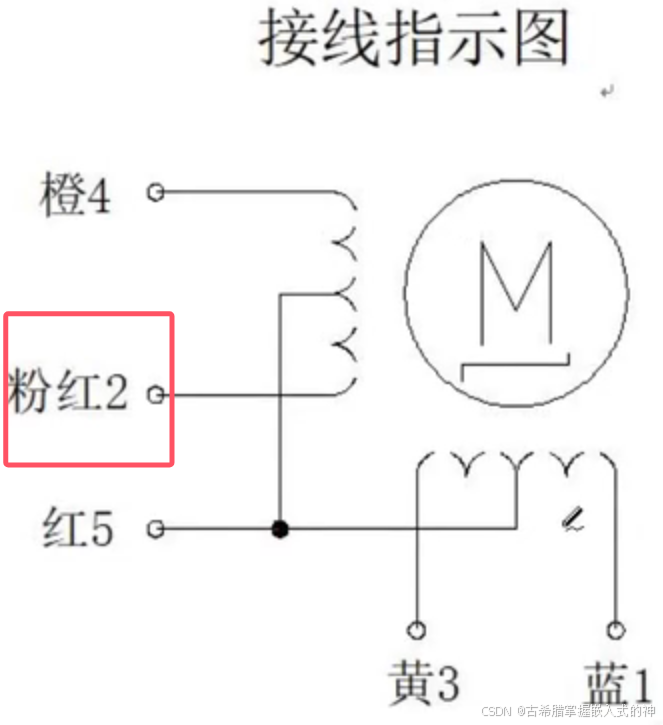
如上图,有一个公共端 粉红2 接电源,其他各自按顺序从高电平到低电平就能实现转动
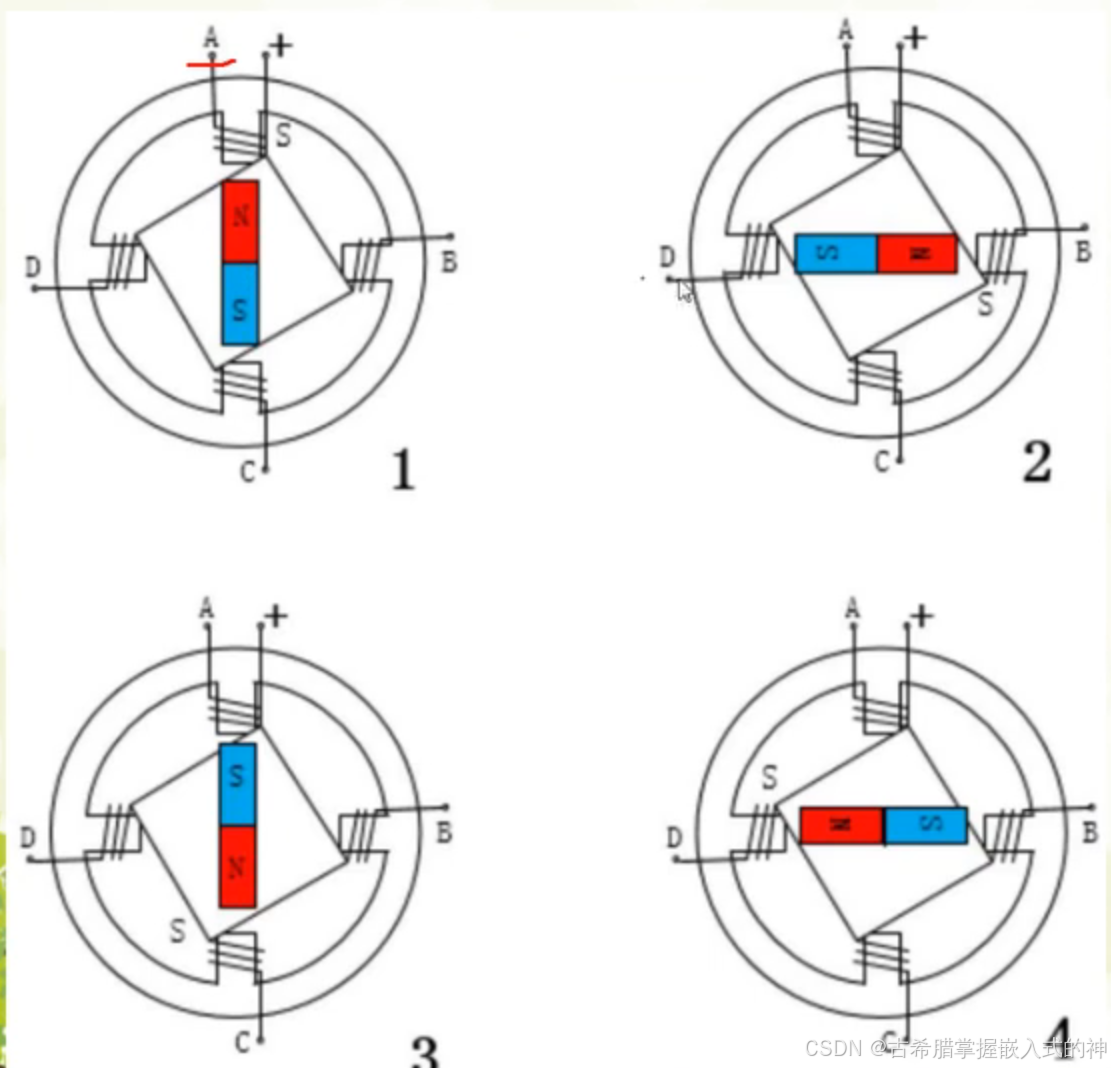
2、双极性
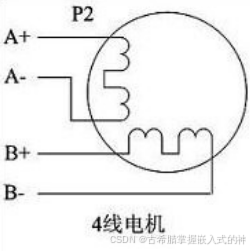
如图,就是 A+ A-,B-B+两两控制方向。
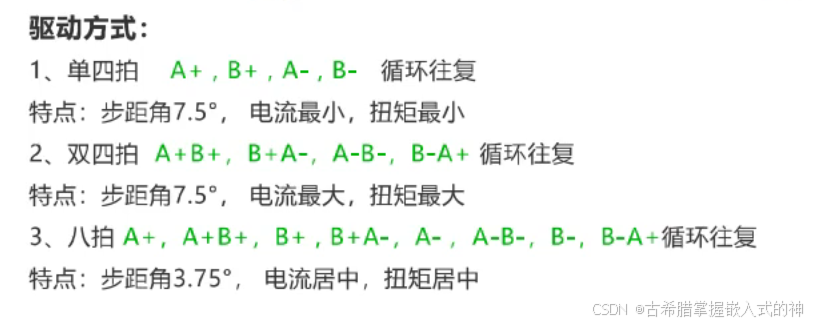
3、角度控制
分为单四拍和双四拍
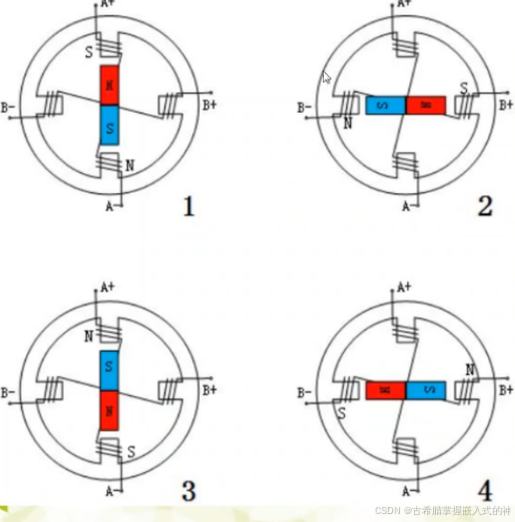
1、双极性
2、单极性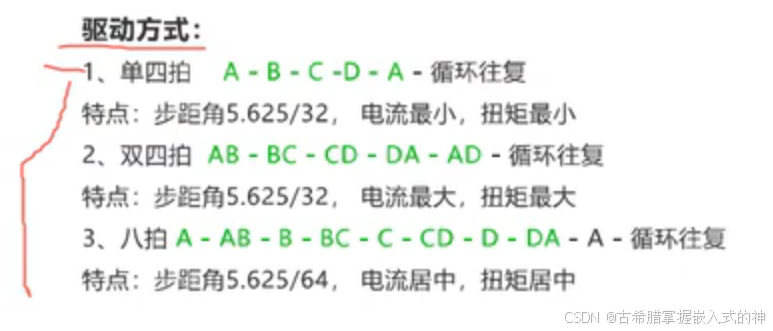
步进角
4、驱动细节
如何判定驱动模块的引脚抽头是对应一个线圈:
用万用表测量电阻,如果引脚内阻很小,那么则是一个线圈的两个抽头A1 A2 或者A- A+
5、闭环控制
原理:
1、磁编码
2、霍尔传感器

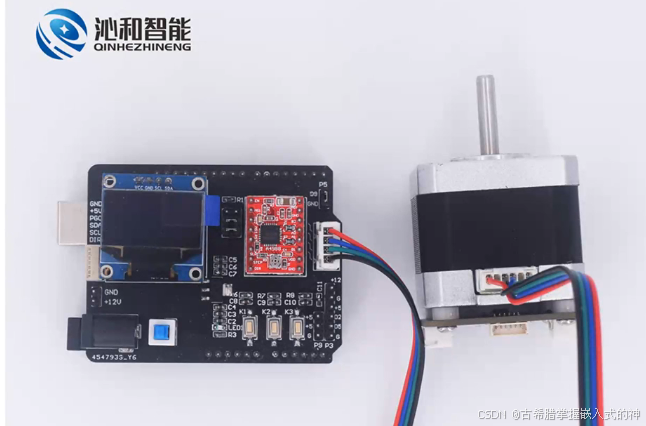
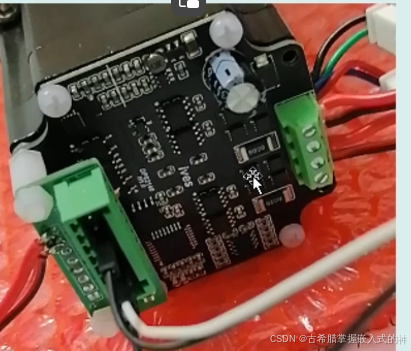
如图,板子背面有个霍尔传感器,放在板子背面中心处,在电机中心处也有一个圆形状此磁铁,磁铁和霍尔传感器紧紧挨在一起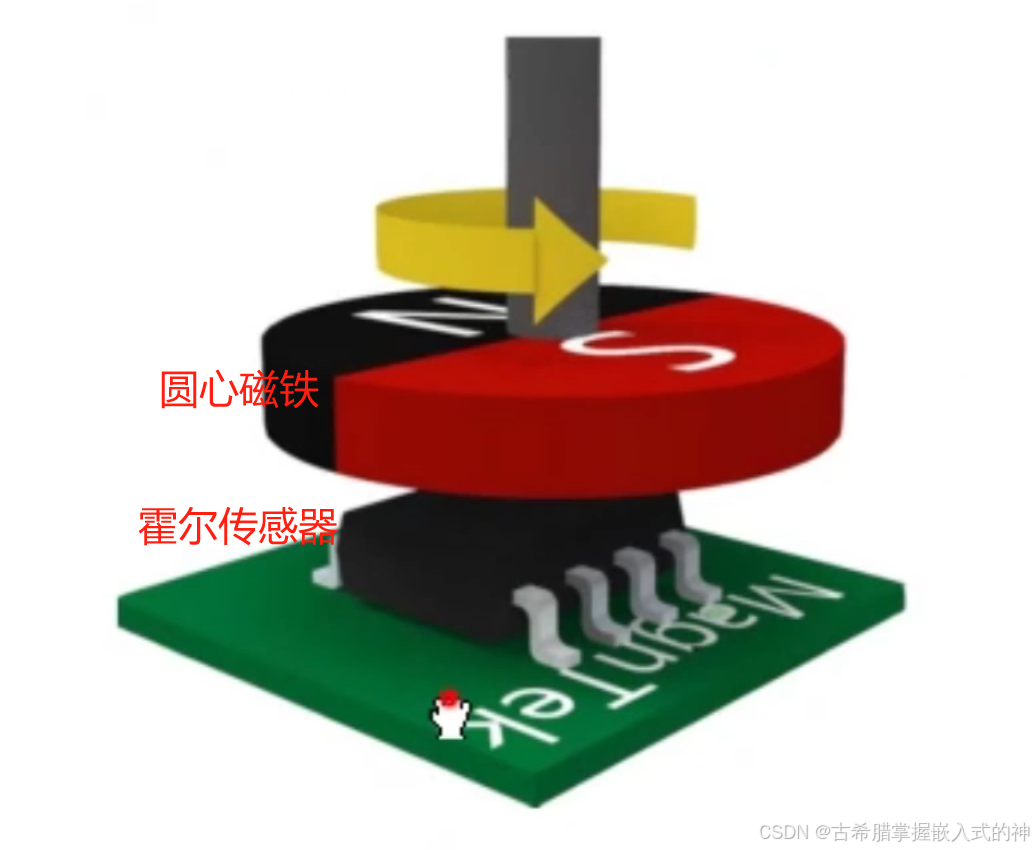 具体原理可以看步进电机闭环控制原理-MT6816应用线路-霍尔传感器磁编码器_哔哩哔哩_bilibili
具体原理可以看步进电机闭环控制原理-MT6816应用线路-霍尔传感器磁编码器_哔哩哔哩_bilibili


















 3142
3142

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









