







电机-电机指南
■ 电机
■ 控制
| 电机类别 | 控制方式 |
|---|---|
| 直流有刷电机 | 我们常用脉冲宽度调制技术(PWM)来控制电压的大小,以此改变直流有刷电机的转速。 |
| 步进电机 | 接收的脉冲个数决定了它的旋转位置,脉冲频率决定了它的旋转速度。 |
■ 分类
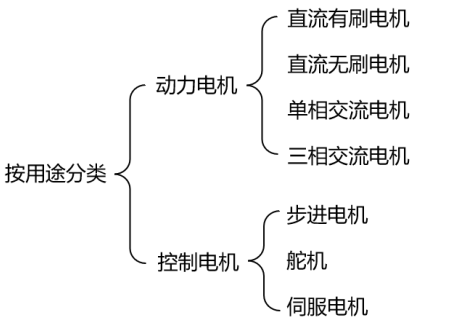
■ 特点
| 电机类别 | 特点 |
|---|---|
| 直流有刷电机 | 驱动简单,成本低廉,但是噪音大, 故障较多, 寿命也相对较短。 |
| 直流无刷电机 | 噪音低,运转流畅,高速,寿命更长,但是控制较为复杂。 |
| 舵机 | 自成闭环控制系统, 角度控制优秀,价格低,但是带负载的能力较弱。 |
| 步进电机 | 结构简单,驱动方便,没有积累误差,不过因为其可能存在丢步现象,常用于对精度要求不高的场合。 |
| 伺服电机 | 速度、位置控制精确,可低速运行,效率高,寿命长,可以说是目前最为可靠的一类电机。但是价格较高。 |
■ 名词
| 编号 | 名词 | 特点 |
|---|---|---|
| 1 | 转速: | 电机输出轴的速度,一般单位是 r/min(转每分钟),也常用 RPM 表示。 |
| 2 | 输出扭矩: | 表示了电机输出轴可以输出力的大小,单位一般为 N· m 或者 kg· cm。 |
| 3 | 工作电压: | 电机正常工作的电压。 |
| 4 | 额定电流: | 电机正常工作时的电流。 |
| 5 | 堵转电流: | 电机负载过大,驱动力不足,发生堵转时的电流。 |
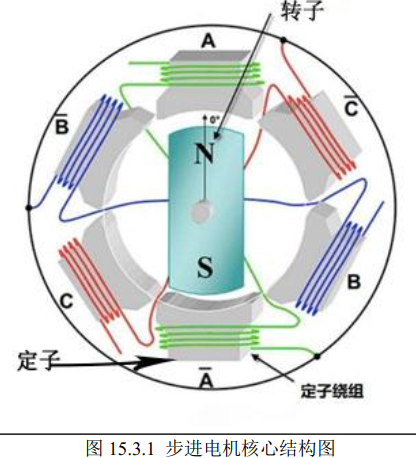
■ 步进电机
■ 简介
步进电机是一个把电脉冲信号转换为角位移或线位移动的电动机。

■ 类别
磁激励的方式进行区分,将步进电机区分为三大类: 永磁式、反应式(磁阻式)、混合式步进电机。
| 类别 | 优点 | 缺点 |
|---|---|---|
| 永磁式 | 动态性能好,输出力矩大 | 步距角过大(一般 7.5°或 15° ),精度较差。 |
| 磁阻式 | 结构简单,成本低,步距角小可达 1.2° | 噪音和震动过大,动态性能较低。 |
| 混合式 | 力矩大,动态性能好,步距角小,精度高 | 结构复杂,成本相对较高。 |
以极性的方式作为区分,可分为:单极性步进电机、双极性步进电机。
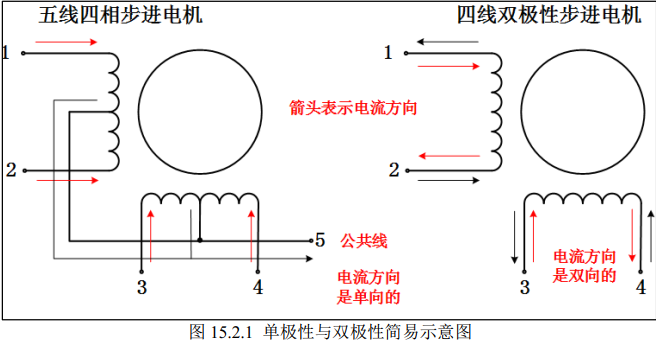
■ 单极性步进电机
■ 单极整步驱动
有 5 根线,分别是 A、B、 C、 D 以及公共端,公共端是一直通电的, ABCD 相是交替得电的。
通电顺序步骤
第一步: A 相通电,通过电磁原理,电生磁,然后通过磁力把转子吸引到 A 处;
第二步: A 相关闭, B 相通电,转子就会旋转 90°到 B 处;
第三步: B 相关闭, C 相通电,转子会再次旋转 90°,到 C 处,
第四步: C 相关闭, D 相通电,就会旋转到 D 处,重复该顺序就可以以 90°的步距角顺时针旋转起来。
这种属于单相激励步进,意思就是每步进一步都只受到了一个磁场的力,但是更为常见的是双相激励的方式,因为力矩相对会更大,
■ 双相激励驱动
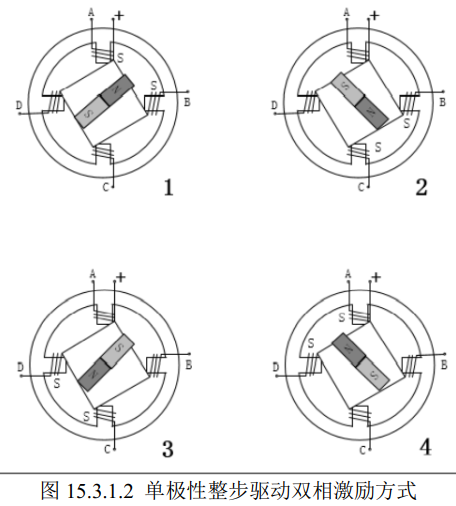
通电顺序: AB—BC—CD—DA,重复该顺序就可以使电机顺时针旋转起来。
■ 半步驱动
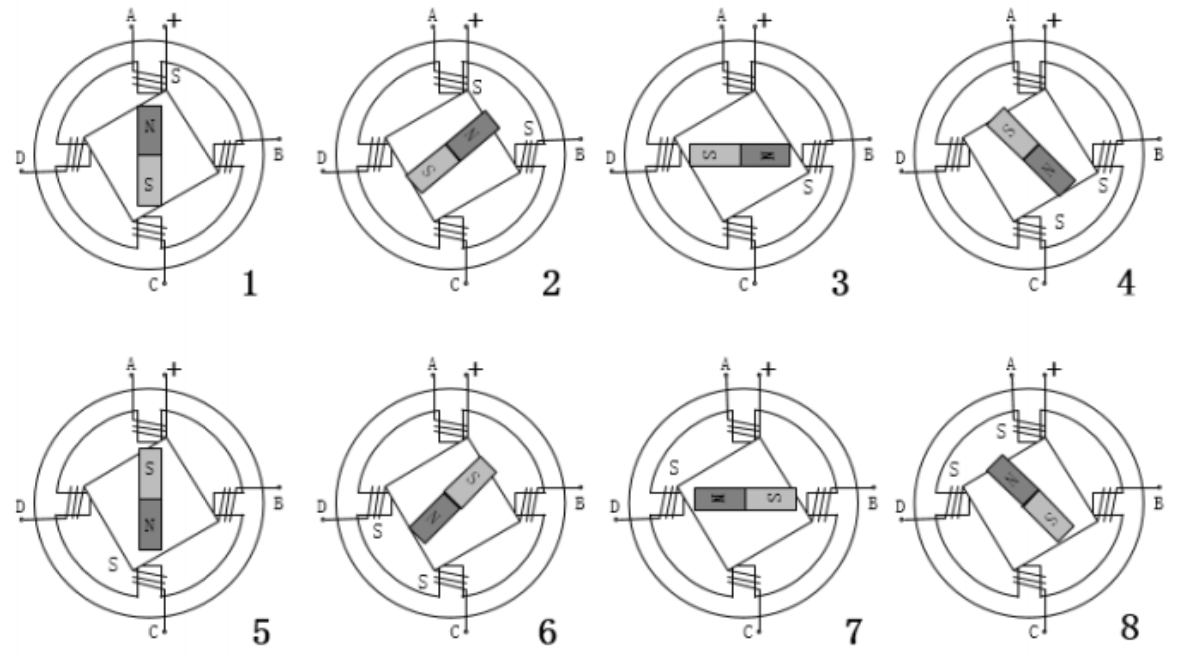
它每步步进的距离为 45°,我们来看下它的通电顺序: A—AB—B—BC—C—CD—D—DA,重复该步骤,
电机就可以以 45°的步距角顺时针旋转了,同理想要逆时针旋转的话就将通电顺序反过来即可。
■ 双极性步进电机
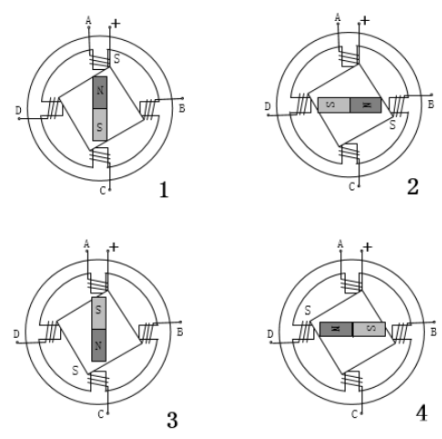
■ 双极性单相激励整步驱动
双极性单相激励

通电顺序
第一步: A 相通电, A+方向接电源正极,A-接电源负极,产生磁场,异性相吸,就会将转子吸引到第一步的位置;
第二步: A 相关闭, B 相通电(B+接正, B-接负),就会吸引转子旋转 90° ;
第三步: B 相关闭, A 相通电(A+接负, A-接正),此时就会吸引转子继续旋转 90° ;
第四步: A 相关闭, B 相通电,极性与第 2 步相反,重复该步骤就可以使其以 90°的步距角顺时针旋转了。
■ 双极性双相激励整步驱动
双极性也有双相激励整步驱动
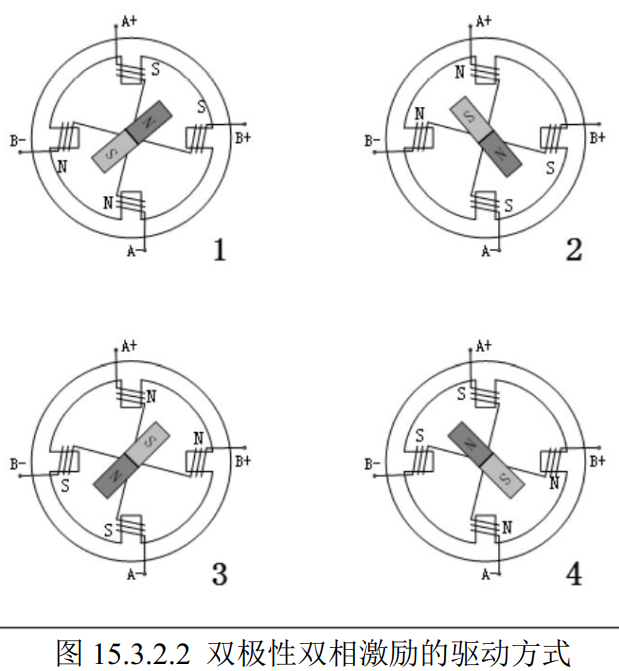
它的通电顺序为:
AB(A+B+接正) —AB(A-B+接正) —AB(A-B-接正) —AB(A+B-接正)重复该顺序即可顺时针旋转起来。
■ 双极性半步驱动
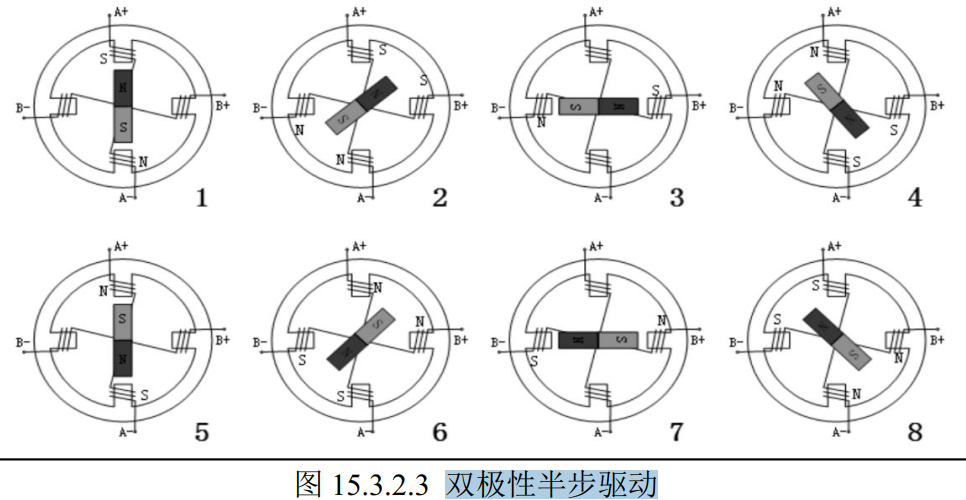
通电顺序:
第一步: A 相通电(A+接正), B 相不通电;
第二步: AB 相通电(A+B+接正),通入相同电流,产生磁力相同;
第三步: B 相通电(B+接正), A 相不通电
第四步: AB 相通电(A-B+接正),通入相同电流,产生磁力相同;
第五步: A 相通电(A-接正), B 相不通电;
第六步: AB 相通电(A-B-接正),通入相同电流,产生磁力相同;
第七步: B 相通电(B-接正), A 相不通电
第八步: AB 相通电(A+B-接正)通入相同电流,产生磁力相同;
重复上面步骤就可以以 45°的步距角顺时针旋转, 与整步相比半步的驱动方式旋转起来更加的顺滑。
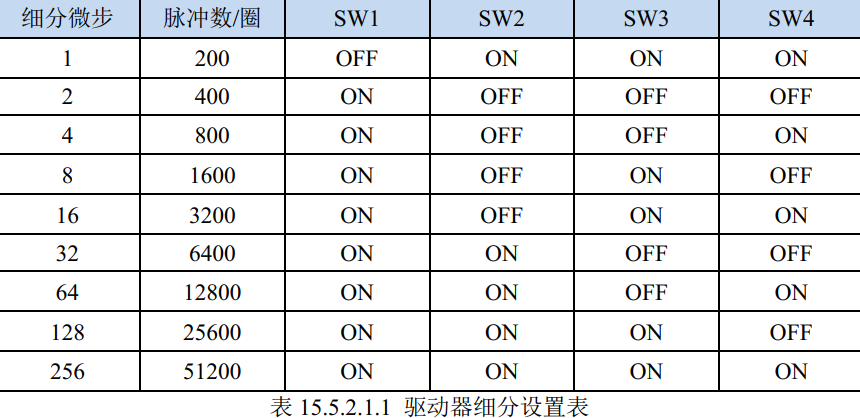
步距角 45°还是过于大,减小步距角呢?
硬件改进: 通过增加线圈的组数或者增加转子的齿数, 进而减小步进的角度。
软件改进: 使用细分驱动的方式,减小步距角,何谓细分驱动? 我们来看下细分驱动的原理。
■ 细分驱动原理
细分的原理就是: 通过改变定子的电流比例, 进而控制转子在一个整步中的不同位置,即可以将一个整步分成多个小步来运行。
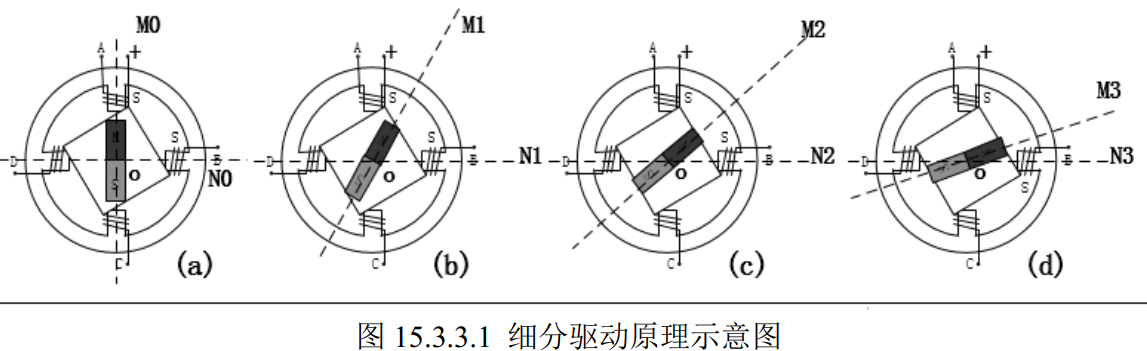
细分驱动,单双极步进电机都同理, 所以不分单双极电机.
图为双相激励
图 (a):为 A 相电流很大, B 相的电流极其微弱,接近 0;
图 (c):为 A 相和 B 相的电流相同,电流决定磁场,所以说 A 相和 B 相的磁场也是相同的。
图 (b)和 图(d)这两个是由于 A 相和 B 相的电流不同产生位置情况;由此可以得出改变定子的电流比例就可以使得转子在任意角度停住。
■ 指标术语
| 编号 | 静态指标术语 | 描述 |
|---|---|---|
| (1) | 相数 | N、 S 磁场的激磁线圈对数,两相步进电机步距角为 1.8°,三相的步进电机步距角为 1.5° |
| (2) | 拍数 | 完成一个磁场周期性变化所需脉冲数, 以四相电机为例,有四相四拍运行方式即 AB-BC-CD-DA-AB,四相八拍运行方式即 A-AB-B-BC-C-CD-D-DA-A。 |
| (3) | 步距角 | 一个脉冲信号所对应的电机转动的角度。 |
| (4) | 定位转矩 | 电机在不通电状态下,电机转子自身的锁定力矩。(由磁场齿形的谐波以及机械误差造成的)。 |
| (5) | 静转矩 | 电机在额定静态电压作用下,电机不作旋转运动时,电机转轴的锁定力矩。此力矩是衡量电机体积的标准,与驱动电压及驱动电源等无关。 |
| 编号 | 动态指标术语 | 描述 |
|---|---|---|
| (1) | 步距角精度: | 步进电机转动一个步距角度的理论值与实际值的误差。用百分比表示:误差/步距角 *100%。 |
| (2) | 失步: | 电机运转时运转的步数,不等于理论上的步数。也可以叫做丢步,一般都是因负载太大或者是频率过快。 |
| (3) | 失调角: | 转子齿轴线偏移定子齿轴线的角度,电机运转必存在失调角,由失调角产生的误差,采用细分驱动是不能解决的。 |
| (4) | 最大空载起动频率: | 在不加负载的情况下,能够直接起动的最大频率。 |
| (5) | 最大空载的运行频率: | 电机不带负载的最高转速频率。 |
| (6) | 运行转矩特性: | 电机的动态力矩取决于电机运行时的平均电流(而非静态电流),平均电流越大,电机输出力矩越大,即电机的频率特性越硬。 |
| (7) | 电机正反转控制: | 通过改变通电顺序而改变电机的正反转。 |
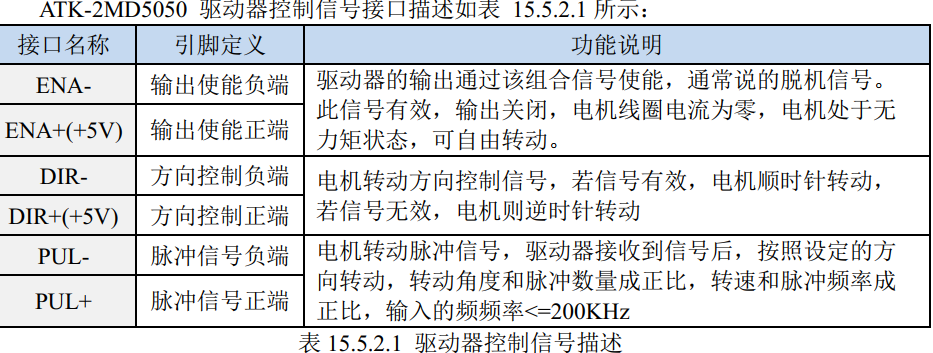
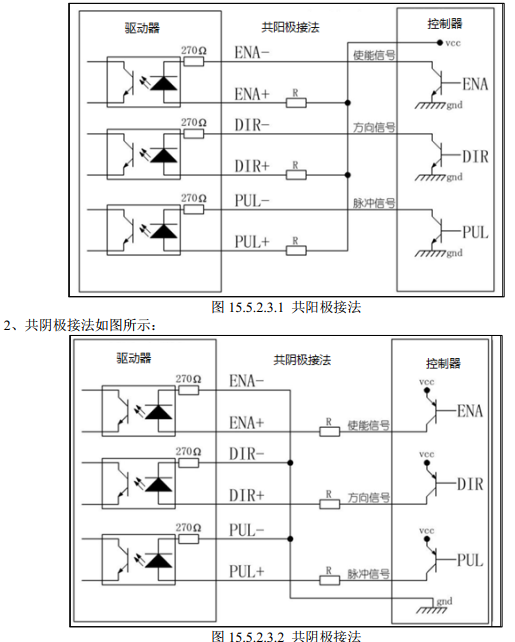
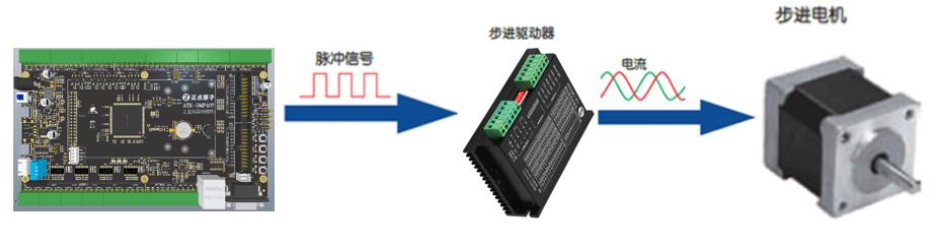
■ 驱动器介绍
将 MOS 管、控制器、电源、保护电路、散热器等等集成在一起, 就做成了步进电机驱动器。
驱动器的作用就是将控制器的信号放大或者进行转换。

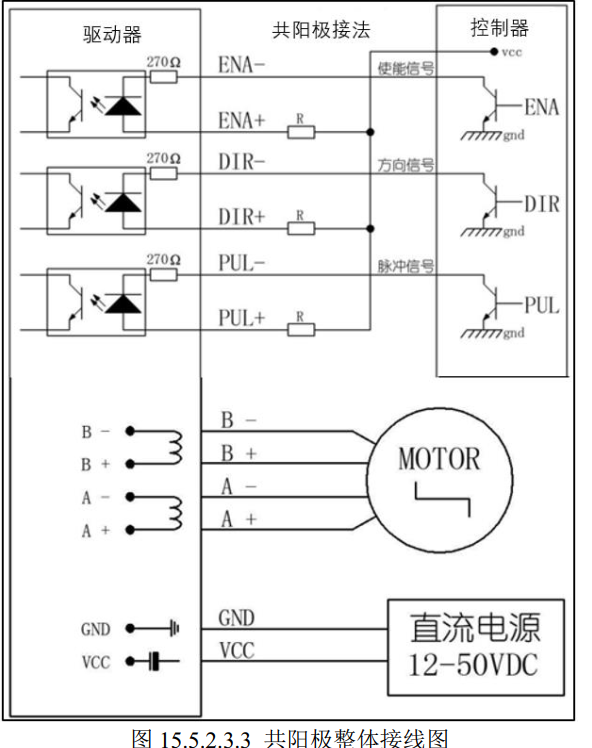
共阳极接法整体接线如下图所示:
■ 伺服电机
■ 简介
伺服电机是指在伺服系统中控制机械元件运转的电动机,它搭配上驱动器,形成一个完整的伺服系统 ,就能够精准地控制速度、位置等
伺服电机具有线性度高、起动转矩大、运行范围较广、无自转现象等显著特点,
遗憾的是, 就目前来说,一整套伺服系统的成本是相对较高的。

■ 直流有刷电机
■ 简介
直流有刷电机(BDC)是一种内含电刷装置,可以将直流电能转换成机械能的电动机。
只需要调整电压,即可调整它的转速。 因此这类电机拥有良好的调速性能。
在一些对电机输出扭矩(即输出的力)有高要求的场景,我们会给直流有刷电机加上减速齿轮组,以增大输出扭矩,这一类电机就是直流有刷减速电机
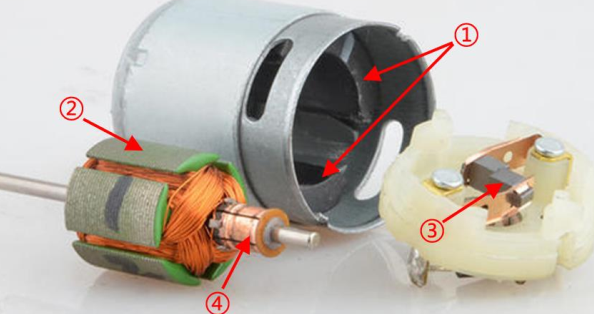
① 定子:用于产生固定的磁场,通常由永磁体或电磁绕组制成。
② 转子:由一个或多个铜线绕组构成,通电后可以在磁场中受力运动。
③ 电刷:将外部电流输入到转子绕组上。
④ 换向器:改变转子绕组中电流的流向,是电机可以持续转动的关键结构。

直流无刷减速电机
■ 特点
| 优点 | 缺点 |
|---|---|
| 调速性能好、驱动简单、操控方便、成本低 | 寿命短、可靠性差、换向火花易产生电磁干扰 |
■ 电机参数
① 额定电压:电机正常工作的电压。
② 额定电流:也叫负载电流,电机带负载正常工作时的电流。
③ 额定转速:也叫负载转速,单位是 r/min,也常用 RPM 表示。
④ 额定扭矩:电机额定电流下输出力的大小,单位常用 kg· cm 或 N· m。
⑤ 减速比:电机转子原始转速与减速后的输出转速之比,表示为 N: 1。
注意:电机不要使用过大负载,以防止电机堵转,造成电机过热甚至烧毁。
■ 调速原理
只需要改变电源电压(输入电流)的大小,转子线圈的受力也会随之变化,这样就可以改变电机的转速了。在实际的应用中,我们就是通过控制
直流有刷电机的输入电压来实现调速的。
■ 换向原理
当转子线圈中电流的方向发生变化,线圈的受力情况也会发生改变,因此,我们只需要改变转子线圈中的电流方向即可实现电机换向。
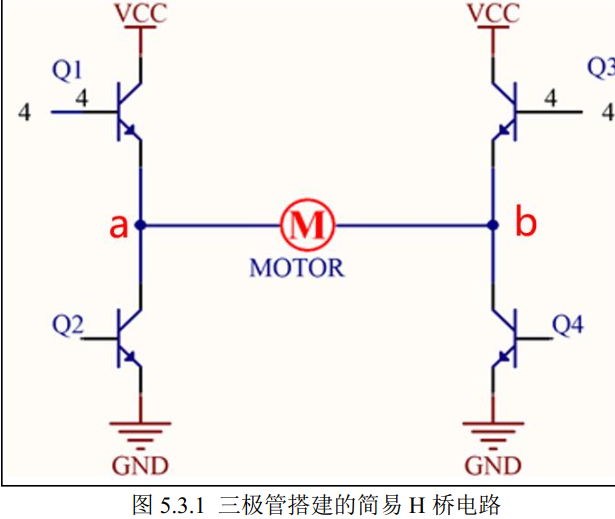
■ 驱动板- H桥驱动原理
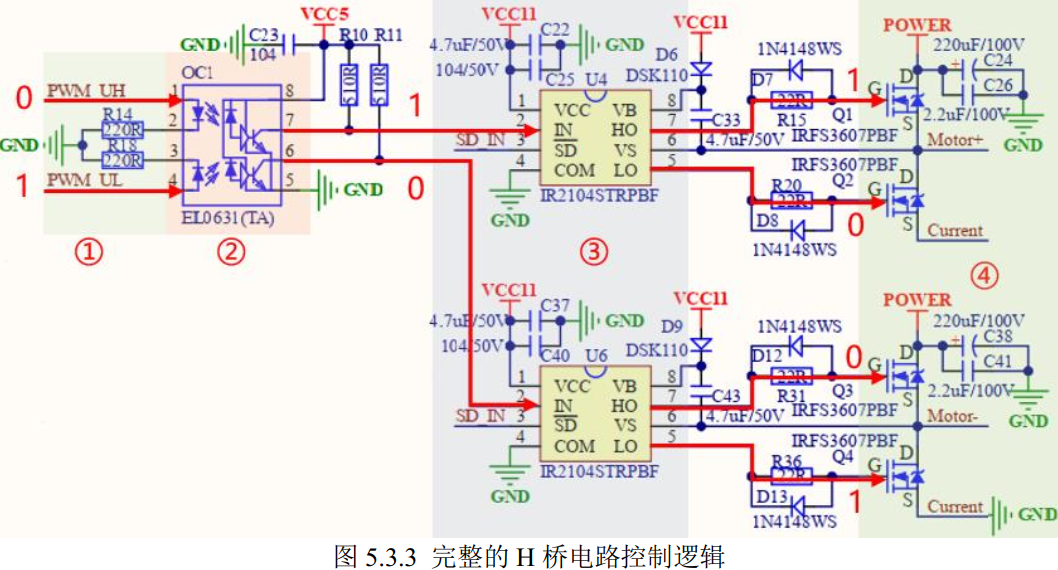
① 首先给 EL0631 光耦(上图中序号②)输入两路相反的控制信号, 0 代表低电平, 1 代
表高电平,其中 PWM_UH 为 0, PWM_UL 为 1。
② 控制信号经过光耦的反相之后进行输出,此时两路信号的高低电平状况就和之前相反
了。反相后的两路信号分别输入到上、下两个 IR2104S 半桥芯片的 IN 引脚(上图中序号③)。
③ IR2104S 半桥芯片的 IN 和 SD 引脚是信号输入引脚, HO 和 LO 是信号输出引脚,输
入信号和输出信号的逻辑如下表所示:
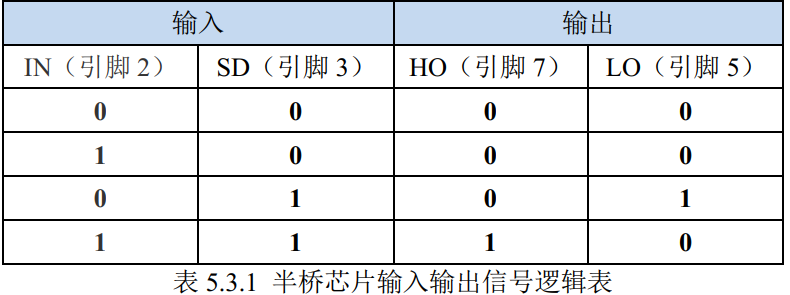
从表 5.3.1 中我们可以得出三个结论: 1、只要 SD 引脚输入低电平,所有的输出都会停止,即 HO 和 LO 都输出低电平; 2、当 SD 引脚为高电平时, HO 引脚输出电平的高低状况和IN 引脚是一致的; 3、 HO 和 LO 引脚永远不会同时输出高电平,这就保证了 H 桥上同一侧的MOS 管不会同时导通,从而避免短路事故的发生。
④ 假设 SD 引脚输入了高电平,我们根据逻辑表,结合此时上下两个半桥芯片的 IN 引脚输入电平,就可以得出上下两个半桥芯片的输出电平状况(上图中序号④)。此时 Q1 和 Q4 导通, Motor+接到了 POWER(VCC), Motor-接到了 GND,电机就可以正常工作了(假设此时电机正转)。
上述的内容就是完整 H 桥电路的控制逻辑,接下来我们看一下它是如何控制直流有刷电机换向和速度的.
方向和速度控制
有了完整的 H 桥电路之后,就可以方便地控制电机的正反转方向和速度,具体的原理如下:
① 控制方向。只需要改变两路输入信号的电平状况即可,最简单的方法就是利用两个 IO输出作为控制信号, IO 翻转即可改变电机方向。
② 电机调速。固定一路输入信号的电平,另一路信号利用 PWM 波作为输入,这样即可调节驱动板输出到电机的电压,从而实现电机的速度控制。
③ 同时控制方向和速度。此时两路的控制信号应满足: 1、两路控制信号既可以固定输出高、低电平,又可以输出 PWM 波(不要求在同一时间); 2、当一路信号输出为 PWM 波的时候,另一路信号会固定输出一个电平。 STM32 高级定时器的 PWM 互补输出功能就可以很好地满足这两个条件。
■ 编码器测速原理
编码器是磁电增量式编码器,它安装在直流有刷电机的尾部,
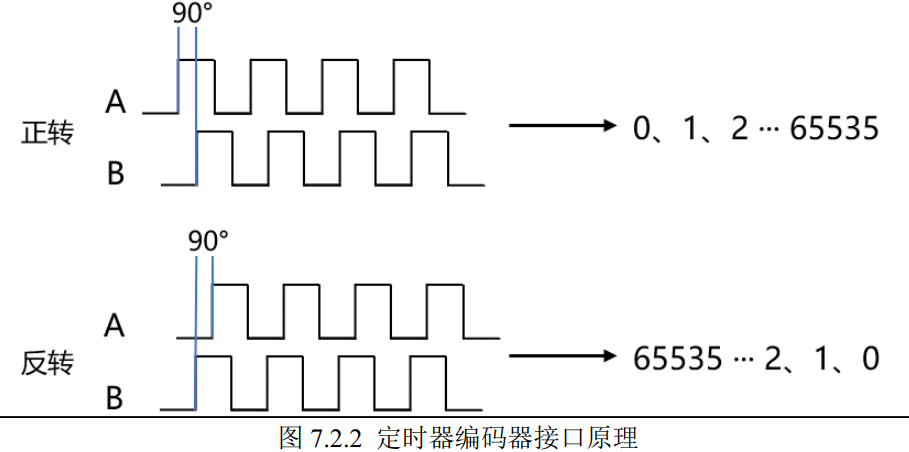
正转时,输出两相脉冲信号, A 相脉冲在前,此时编码器接口把脉冲信号作为计数器的脉冲,计数方式为递增计数;
反转时,计数方式就变成了递减计数。
■ 直流无刷电机
■ 简介
无刷电机是指无电刷和换向器(或集电环)的电机,又称无换向器电机,

■ 分类
■ 无刷无感测速原理
无感通过过零信号测速,当转子只有一对级时,电机旋转一圈,每一相都会出现两次过零点,只需检测其中一相过零信号高电平持续时间,即可求出旋转一圈所需时间。
■ 直流-舵机
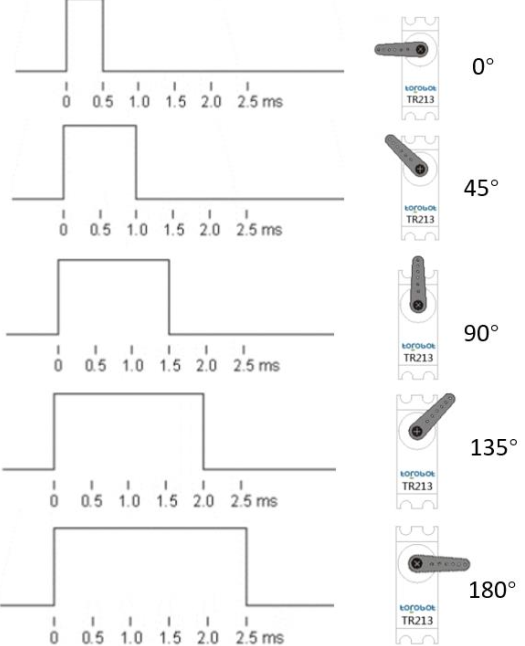
■ 简介
舵机是一种“特殊”的直流电机,其构造不仅只有电机部分,而且还自带一个控制器所以舵机本身就是一个闭环的控制系统(伺服系统)。
它可以将指令信号变换为输出轴的角度并保持住,即便是负载发生了变化,它也能够进行自动调节.
















 1029
1029











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











