







一、有刷直流电机
1.1实验现象
主要是使用到实战板右边沿三个电机最上面的那一个,板子上已经集成了驱动(就在电机接口旁边的那个芯片),可以直接接电机。
1.1.1串口助手
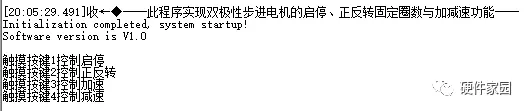
通过与 4 个按键的匹配实现电机的启停、正反转、加速、减速。在烧录程序、复位后电脑上串口助手的显示以下页面,表示用户可以通过以下的按键操作电机的工作。
1.1.2增加、减小占空比
按下按键 1 ,电机启动,默认 PWM 波的占空比是 50% 。
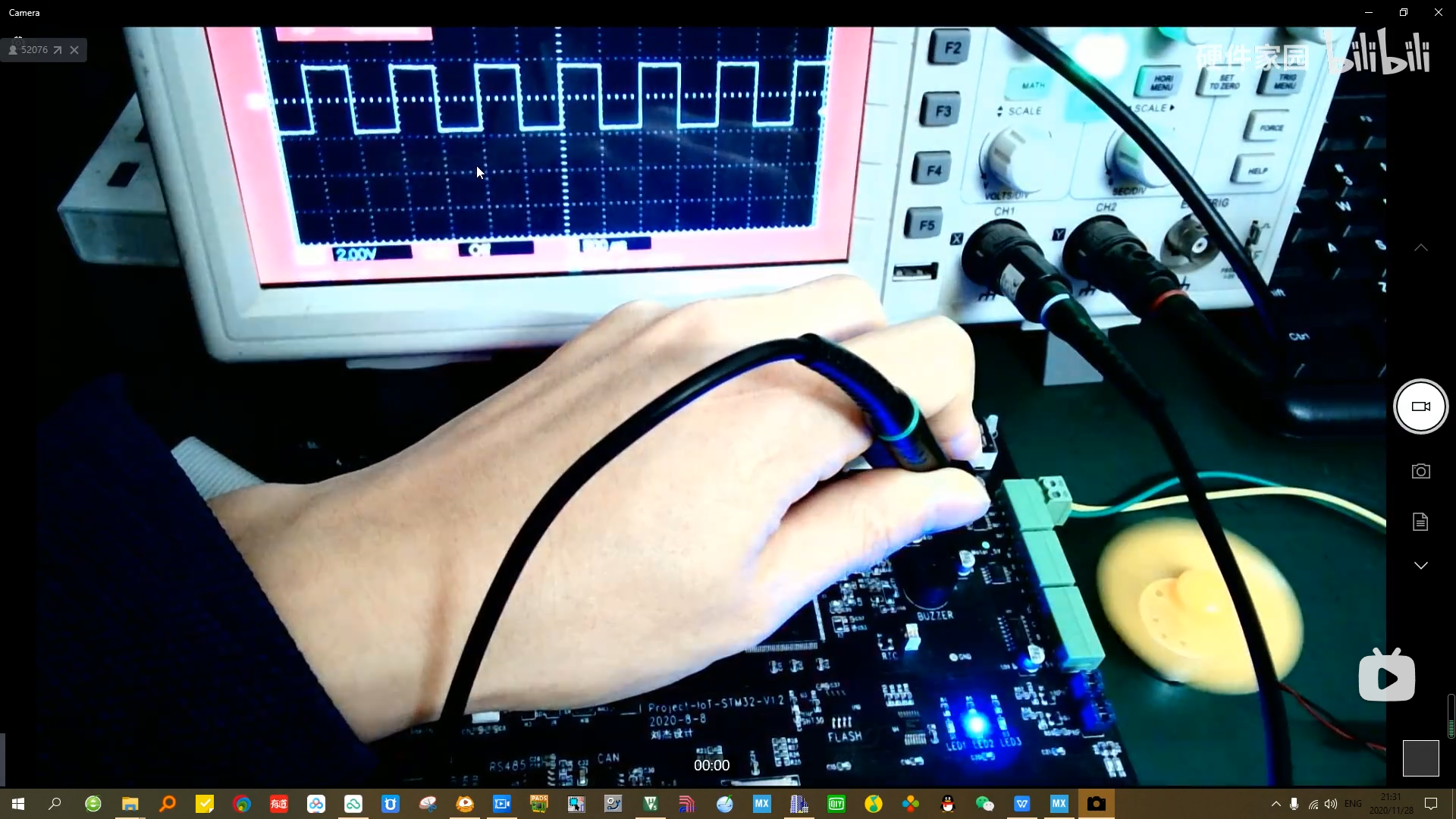
按下按键 3 ,增大占空比,电机开始加速。
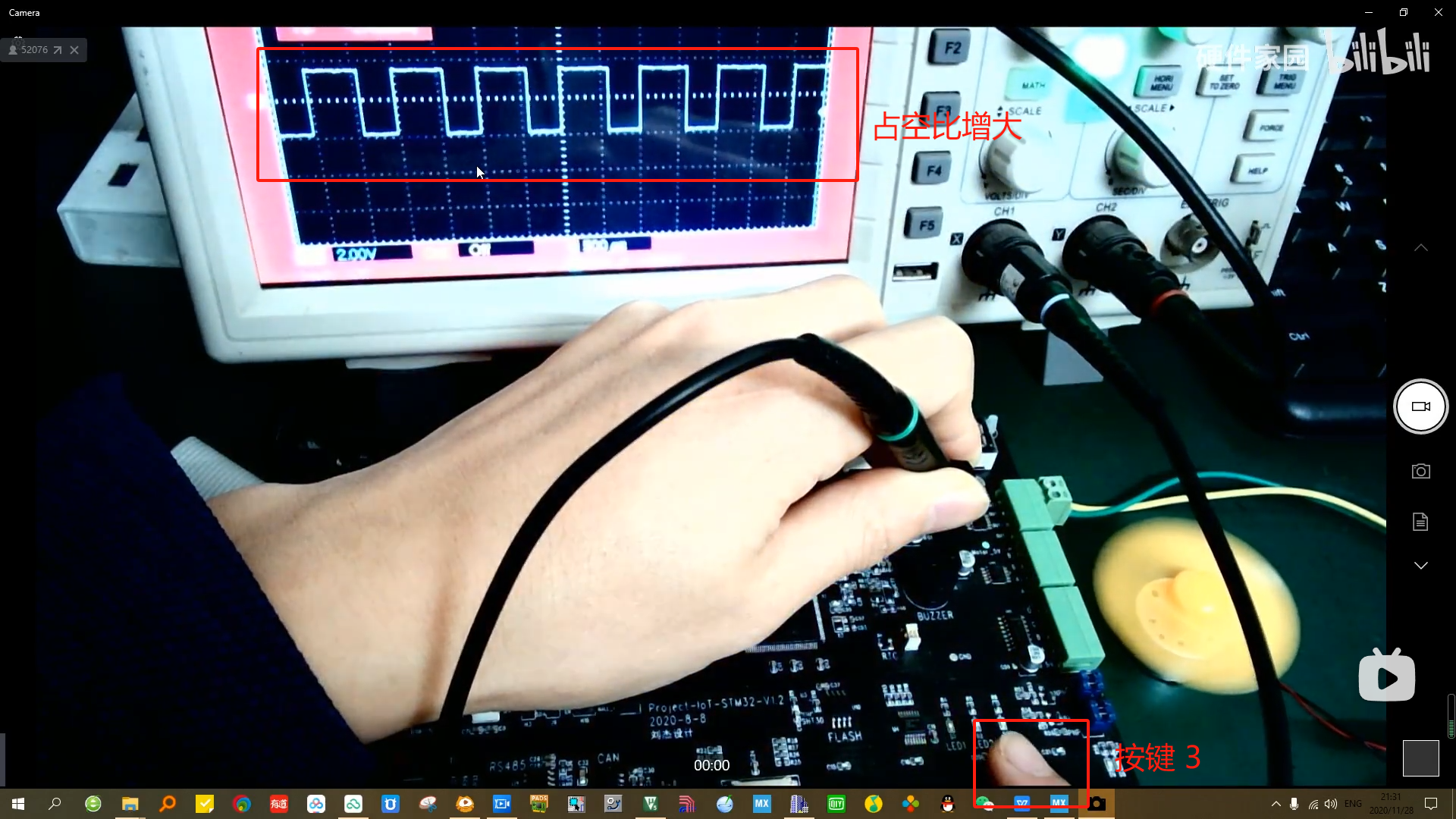
占空比越大,电机的速度越快。下图是占空比更大。
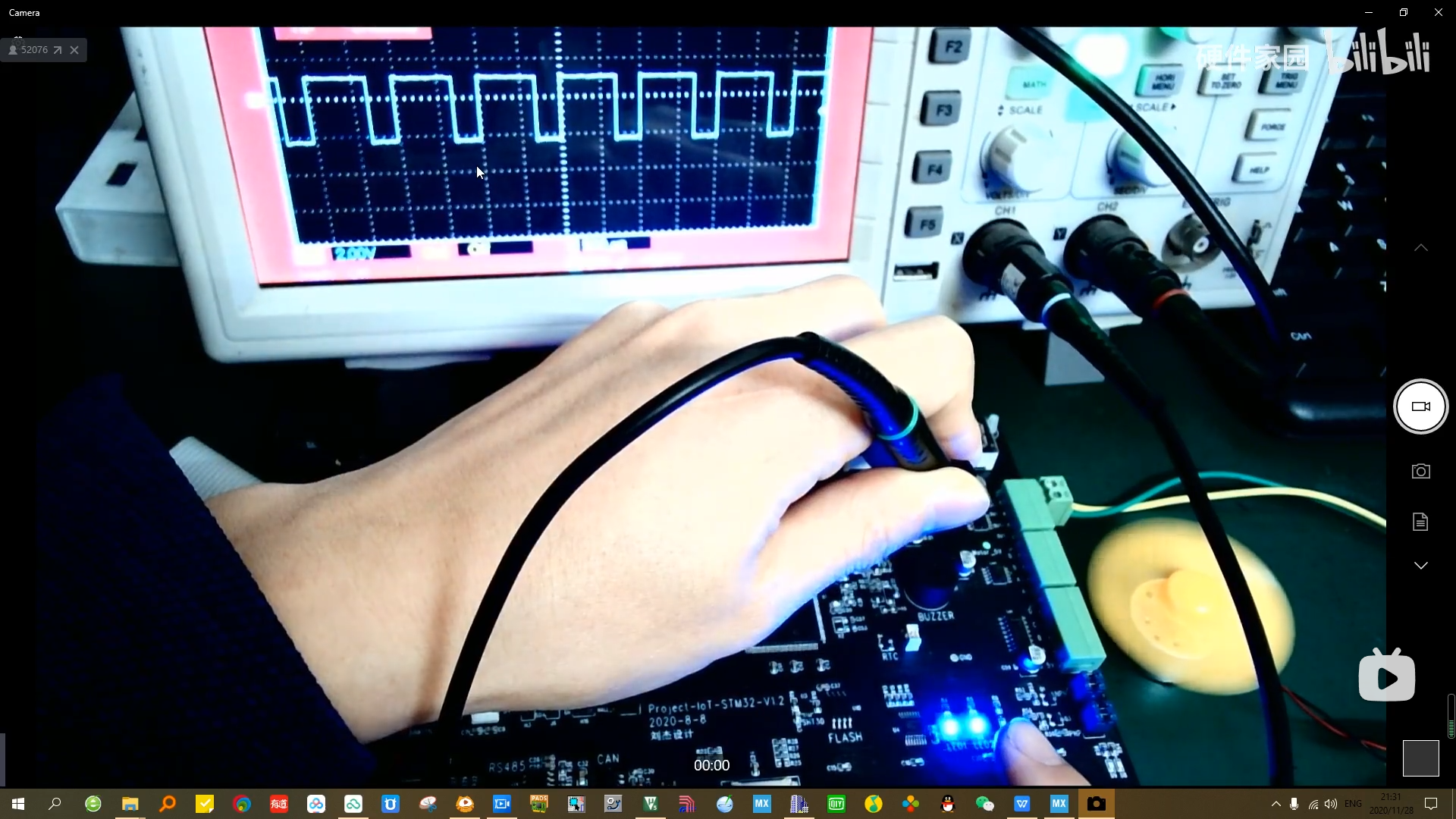
下图是 PWM 波的占空比达到最大,在下图中,PWM 波的波形中没有低电平,完全输出高电平。
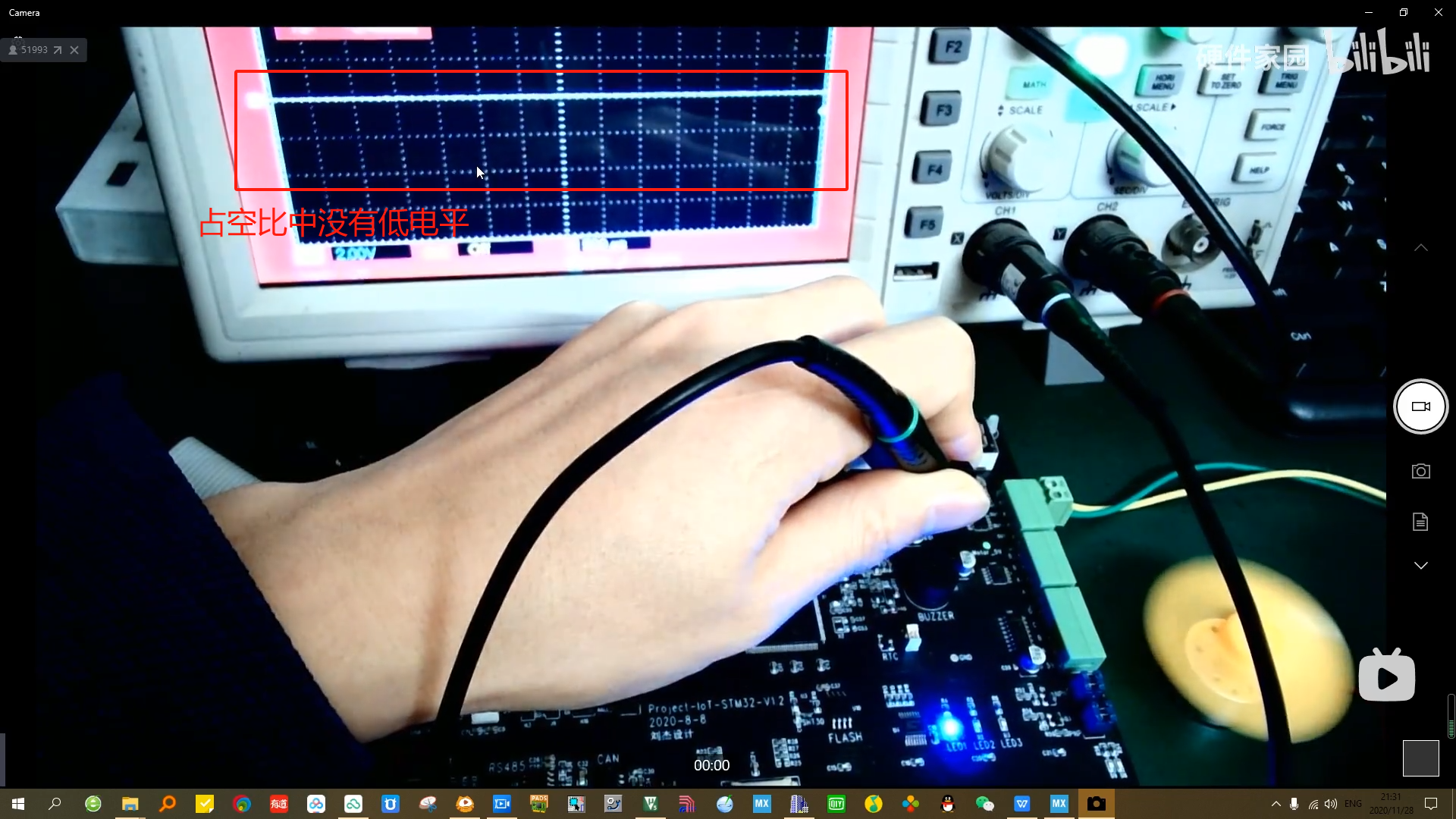
在本实验中占空比最低就是 50% ,设置了不能再低,因为这个电机的缘故,可能再低,电机就不转了。
1.1.3正反转
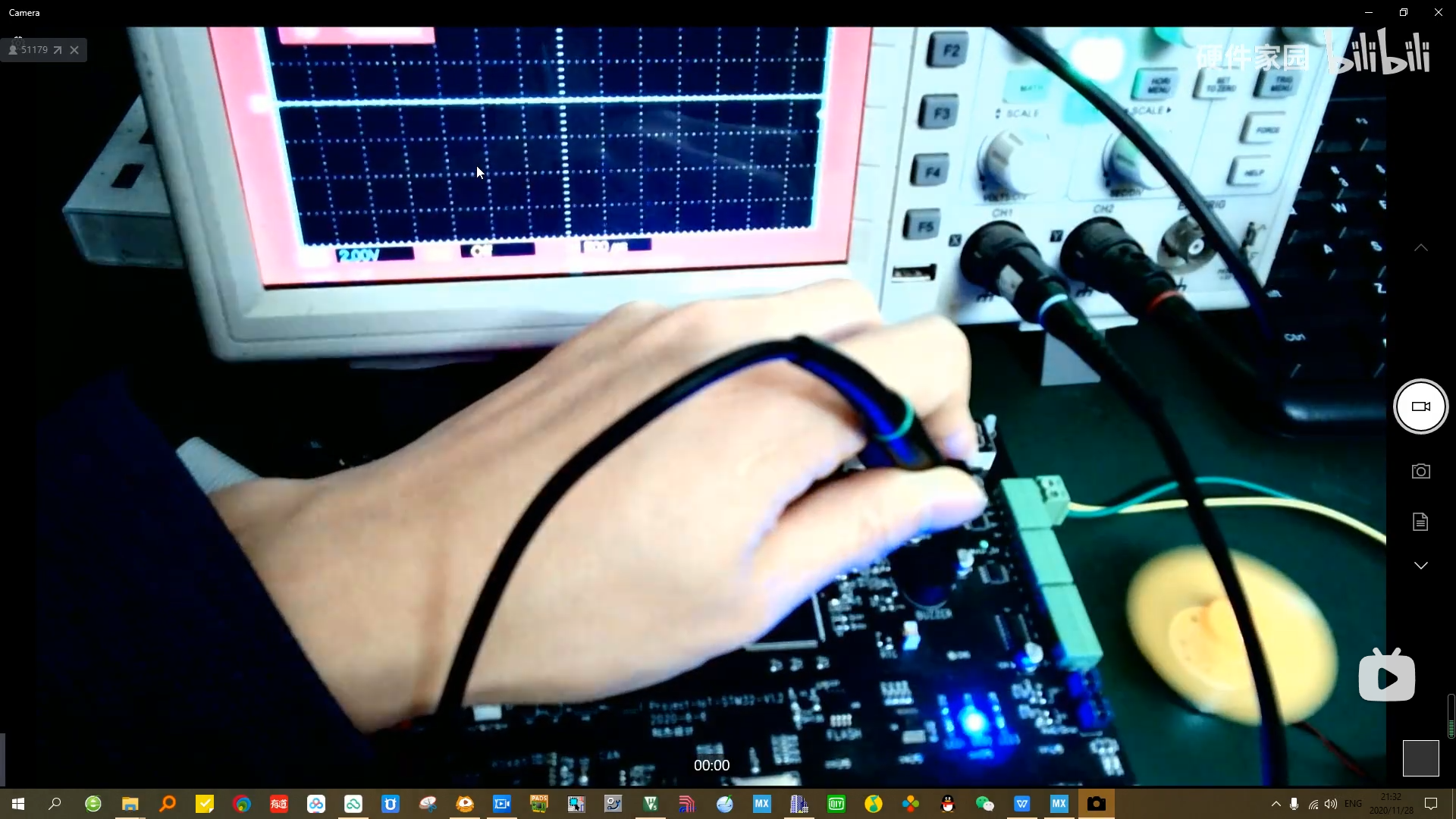
在原本正转、示波器测量点不变的时候,按下按键 2 ,发现电机直接反转,测量点的那一路波形直接变成低电平,如下图所示。
这个时候在另外一路上,如果去测量波形的话,输出的波形就是像上面那样的 PWM 波了。
所以这里有 4 个接口,每一个电机需要两路接口来控制正转和反转,该板子这里可以一次接两个电机。
1.2硬件电路
左边是单片机的接口,通过中间的驱动 IC 来直接接右边的电机(接口),最右边是电容,给后面的电机提供能量的一个电容,这个电容一般要比较大,不然纹波会比较大。
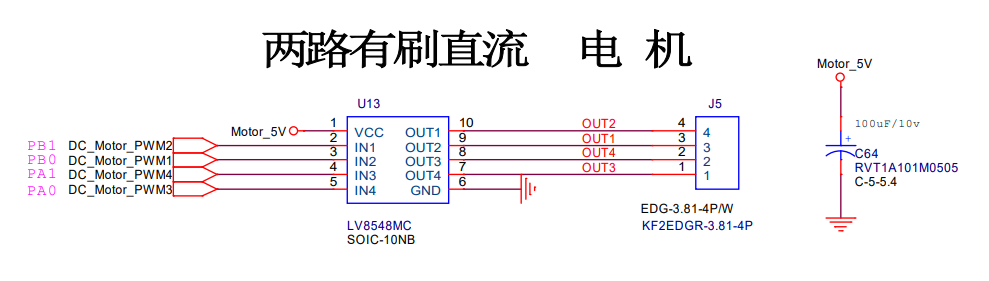
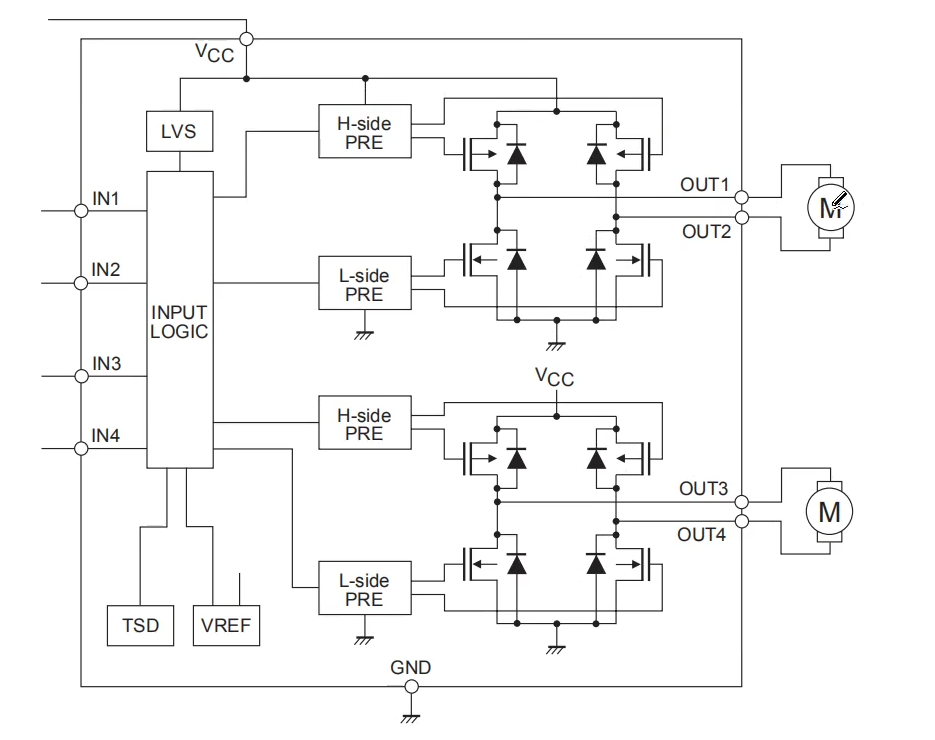
驱动芯片内部是有两个 MOS 管全桥,上面一个,下面一个,因为是全桥驱动,所以才可以控制电机的正转和反转。在我们的输入处只需要提供高低电平就可以。
1.3直流电机
直流电动机是能将直流电能转换成机械能的旋转电机。我们在电机选型的时候,需要考虑以下几个方面:
- 尺寸,因为无论什么电机都需要考虑机械结构,比如说电机安装在什么尺寸的壳里。
- 扭力,电机能不能带动后续的负载。
- 驱动电压,直流电机是由直流电压直接控制的,一般有 5V 、12V 、24V 的常用电压,需要仔细选择。
- 驱动电流,电流和电压决定电机的功耗,一般功率越大,扭力就越大。在选择驱动 IC 时, 必须能满足这个驱动电流和驱动电压才能够驱动。
1.4驱动方式
驱动方式要根据客户、使用场景的需求来定。
1.4.1驱动方式一
只能打开或关闭,不能变速与换向,用继电器,BJT 或 MOS 开关控制通断即可。
就是单片机的一个 IO 口过来,控制一个继电器,继电器接一个电机,只要控制继电器的通断即可。
1.4.2驱动方式二
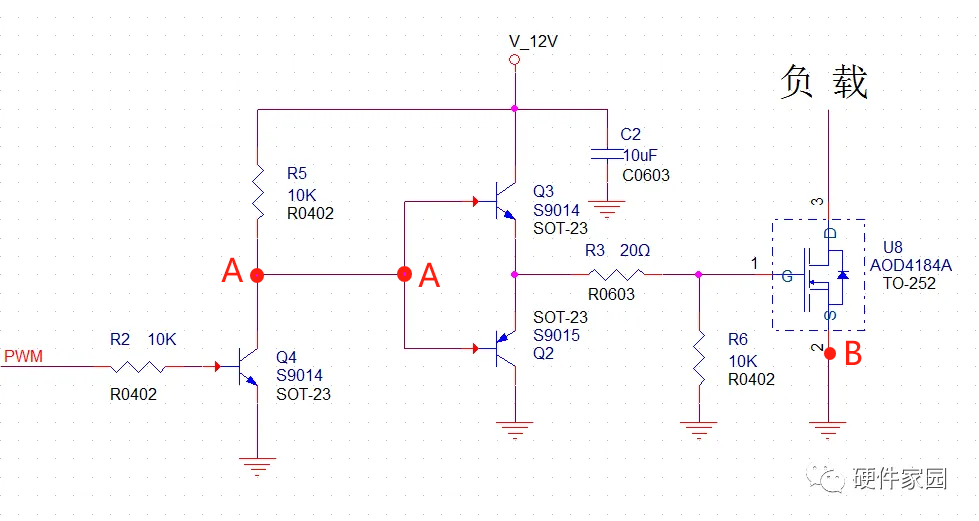
可以打开或关闭,可以变速,但不能换向,用 PWM 控制电子开关即可,如下图,简单介绍一下。
输入一个 PWM 波,输出一个负载电机 M ,接一个适配电源(假设是 5V )。
当 PWM 波输入一个高电平,Q4 导通,A 点的电平被拉低,大致电位约为 0.1V,上面的三极管 Q3 截止。U8 为一个 MOS 管,当它工作的时候,栅极是需要电压的,比如工作电压需要 12V,另外 G 点对地是有一个寄生电容的,寄生电容通过电阻 R3 和 Q2(导通时)进行放电,但是只能将电位放到 0.7V 就无法进行放电了,因为到 0.7V 后三极管就截止了,小于 0.7V 后的电位通过电阻 R6 进行放电,这样一来,U8 栅极的电压可以放到 0V ,0V 后 MOS 管关闭,电机就停止了。
当 PWM 波输入一个低电平,Q4 截止,A 点的电位就是上面的电源,接近 12V ,下面的三极管 Q2 截止,上面的三极管 Q3 导通。Q3 导通之后,12V 的电源通过 电阻 R3 对上面提到的栅极电容进行充电,MOS 打开,电机就开始工作。
综上所述,电机就工作在 PWM 波模式,改变占空比就可以改变电机的速度。
对电路的改进还包括,在 B 下面对地接一个反馈电阻,B 点引出来进行 AD 采样,实现对驱动电流进行检测,既可以保护又可以检测。
除了控制 PWM 波形之外,还可以改变电机的驱动电压(比较麻烦)也可以达到变速的目的,比如用那种旋钮式的,电压从 0~24V 来驱动一个电机,但是现在比较流行的方式还是控制 PWM 波。
1.4.3驱动方式三
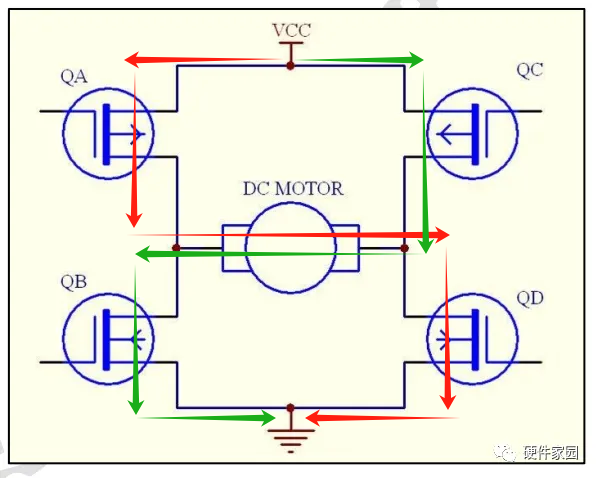
可以打开或关闭,可以变速,也可以换向,用PWM控制桥路,如下图,解释如下:
上面只是使用了一个 MOS 管,如果需要换向的话,就需要使用 4 个 MOS 管,对于用 4 个 MOS 管控制往往就替换成用 IC 控制,因为如果像上面那样用三极管电路来控制的话,电路就比较冗余,所以一般使用集成 IC(内部集成了可以直接控制的 4 个 MOS 管) ,本项目就使用的一个集成 IC 芯片 8548。
当 QA 和 QD 导通,QC 和 QB 截止之后,电流从左向右流过电机,如下图中红色箭头所示。
当 QB 和 QC 导通,QA 和 QD 截止之后,电流从右向左流过电机,如下图中蓝色箭头所示。
通过桥路,可以改变驱动电流的方向,进而改变电机转动的方向。
在之前的蜂鸣器实验中,也是控制 PWM 波,不过在蜂鸣器实验中控制改变 PWM 波的频率, PWM 波的占空比不变。
在本次实验中,不改变 PWM 波的频率而是改变波形的占空比,既然在这个过程中频率是固定的,那我们不妨先来考虑频率应该等于多少比较合适。
在查阅资料的时候,发现比较合适的说法是:频率建议 6~16KHz(当然是可以根据不同的项目的情况调整的,我们也可以使用 1K 的频率)。在 PWM 波的驱动中,实际是用 PWM 的高低电平来驱动。在 PWM 波的低电平时,电机在这个短暂的时间里是没有驱动电流的,转动靠的是电机的惯性,当 PWM 波的频率太低了,因为低电平停止的时候就比较长,导致电机的震动比较大,而且电机存在卡一下,卡一下的隐患。
如果 PWM 波的频率太高,高低电平切换比较频繁,会导致电机的 EMC 会比较大 ,电机的“力量”可能也会不那么大。
所以控制电机的 PWM 波的频率需要在实际的情况中进行调试,在保证需求的情况下使频率约低越好,但是要保证电机不会震动,正常的转动。
二、单极性步进电机
单极性步进电机的电流只有一个方向,控制起来比较简单;双极性步进电机的电流有两个方向,需要一个桥路来控制,驱动起来复杂一点。
本实验使用到是实战板右边沿三个电机最下面的那一个,同样板子上已经集成了驱动(就在电机接口旁边的那个芯片),可以直接接电机。
2.1实验现象
2.1.1串口助手
和上面串口助手显示出的页面一致,就是上面的电机名称换成了单极性步进电机。
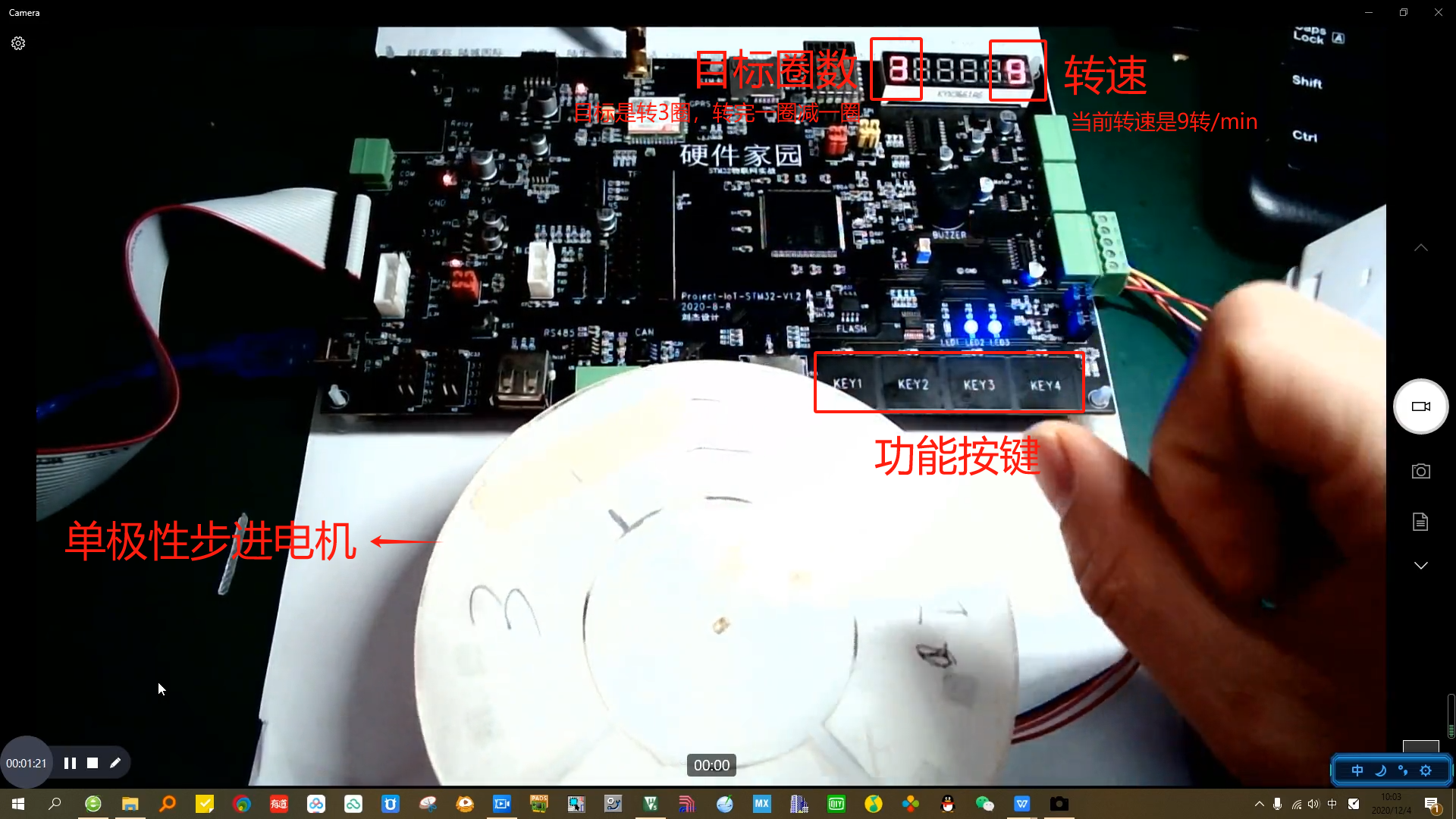
2.1.2实战板
在实战中还运用到了数码管显示目标圈数和当前转速,当转完一圈后,目标圈数会自动减一,减到 0 圈后,电机自动停止。按下加速和减速键后,电机的速度会相应的变化,并且在数码管上显示的转速也会随之加减。
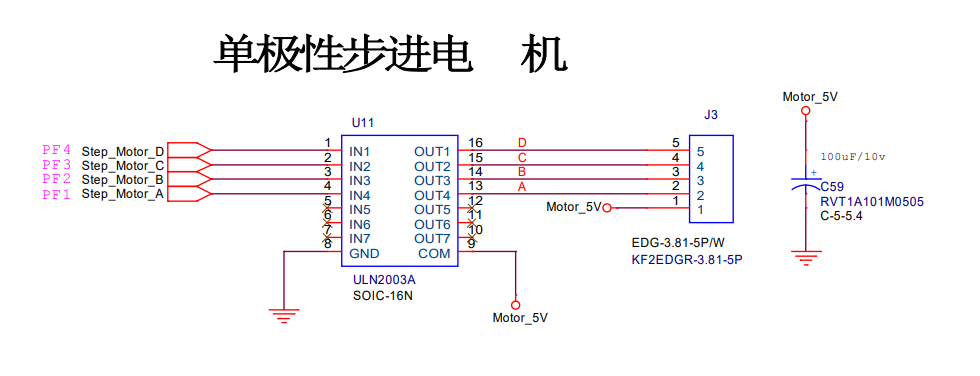
2.2硬件电路
因为电流只有一个方向,使用的芯片是比较简单的 ULN2003A ,芯片内部是一个反相器,最大支持电流约 500mA ,输入给高电平,输出就是低电平,公共端接在 5V ,故低电平的那一相就会导通,当输出为高电平的时候,为开漏输出,无法驱动那一相的电机。
2.3步进电机定义
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
因为电机中有齿轮,每一次准转动的角度都是固定的,只需要开环控制,并不需要闭环控制。
上面的直流电机,驱动起来就是一直转动,控制其转动角度的话,就需要反馈。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率(频率越快,转动越快,所以后续编程改变转速的时候,其实就是改变频率)和脉冲数(控制停止的位置),而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角",它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的,同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
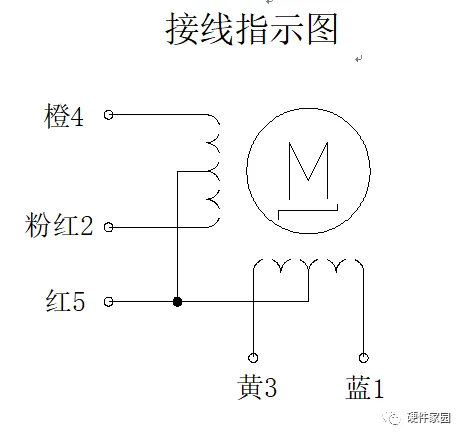
2.4单极性四相五线步进电机
下图是一个典型的单极性四相五线步进电机。

下图是它的示意图,里面有两个线圈,并且中间有抽头引出后连接在一起,引出来的“红5”一般可以接地线,也可以接电源线。下图是接线示意图。
2.4.1单极性
本项目中将公共端红 5 引出接的是 5V (没错,就是原理图中 J1 的 1 角),这样电流就只有一个方向,只能从公共端流入,分别往四相流,所以叫单极性。
2..4.2四相
两个线圈被中间抽头分开后,变成了四个线圈,每一个小线圈就称之为一相,故一共是四相。控制的时候,也是控制每一个小线圈的电流即可。
2.4.3五线
引出来的一共有五根线。
注意在上两张图中,需要将实物的每一根线和接线指示图中的每一根线一一对应好,并且记录。
红 5——公共端
粉红2 ——A
黄 3——B
蓝 1 ——D
橙4——C
2.4.4参数
电压:5V
步进角度:(固定参数,并没有什么详细的解释。转一圈就是360,需要转多少个步进角就是用360除以步进角度,即
,即给电机 4096 个脉冲,电机就会旋转一圈)
减速比:(减速比主要是提高扭力用的,其他并没有详细的讲解)
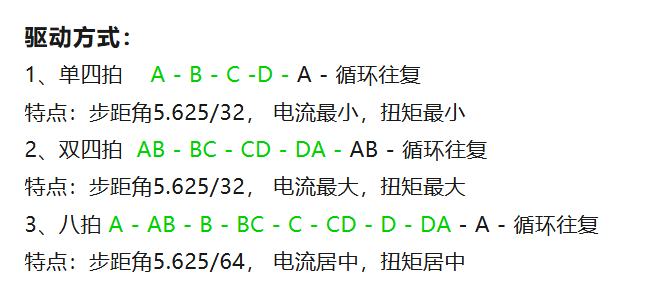
2.4.5驱动方式
我的理解是最原本的步距角是 5.625 ,然后本实验用到的电机存在一个减速装置,按照 1:64 进行减速,所以步距角变成 ,八拍的电机保留这个最小最精确的步距角,由于两种四拍的方式针对八拍来说是一次走了两步,所以是
。
拍表示控制循环一周是几个节拍,其他也是一样的道理。
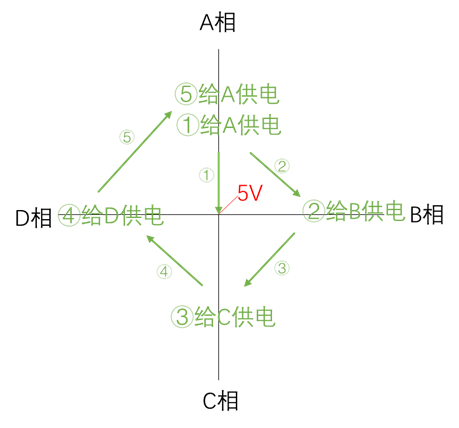
(1)单四拍
每次是给其中一相供电,所以称之为“单”,并且这种通电方式可以通过改变供电相的顺序来实现正反转。下图的通电顺序是:A → B → C → D → A,大致就是第一次没有偏向,后面给谁供电,就偏向谁。(反向供电的道理也是一样)
(2)双四拍
首先给 AB 同时供电,电机会偏向 AB 中间 45° 的位置,因为 A、B 同时两相的磁场是相等的。下图的通电顺序是驱动方式图中给的驱动方式,电机的旋转方向是顺时针。如果想要改变电机的转向,只需要改变通电的顺序即可。
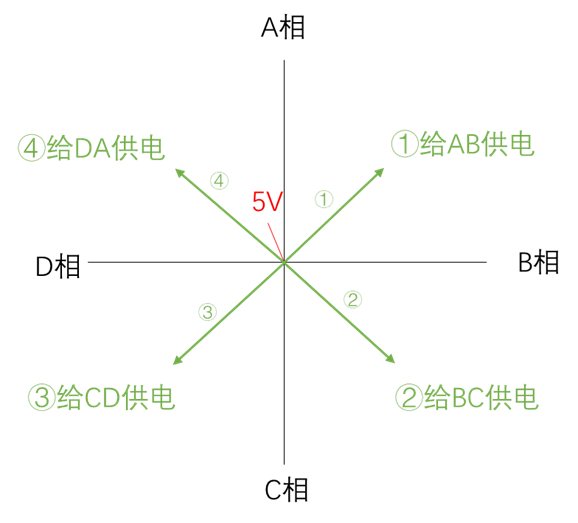
(3)八拍
看了上面的讲解,八拍的供电方式应该很容易理解,就是将电机旋转一周分成了 8 步走,图和解释就省略了。
(4)步距角总结
由于八拍的转动方式,步距角为 5.625 / 64,是电机所能达到的最小的精度。这样一来,单四拍和双四拍的步距角也很容易理解,就是八拍步距角的两倍。
如果用八拍来控制,点击转动一圈需要 4096 个节拍,其他两个需要 2048 个节拍。
(5)电流总结
单四拍每次只给一相供电,电流是最小的。双四拍每次给两相供电,电流是最大的。假设单四拍的电流是 70mA 的话,双四拍的电流就是 140mA ,驱动的电流增加了一倍,需要根据负载驱动来选择。
八拍单项电流和双向电流进行切换,电流是居中的,电流大概在 110mA 。
(6)扭矩总结
扭矩和电流是相互关联的,双四拍每次两相一起供电,电流最大,功耗最大,扭矩最大,其他类推。
故大家要根据使用场景、负载进行合理的选择。
(7)具体选择
八拍:精度最好,当对精度要求比较高,建议选择八拍。
如果对精度要求没有那么高,但是负载比较重,需要很大的扭矩,建议选择双四拍。
如果对精度没有要求,负载也不重,但是希望电机的功耗可以小一点,建议选择单四拍。
(授课老师写了程序讲解了每种驱动方式的编程,我省略。)
三、双极性步进电机
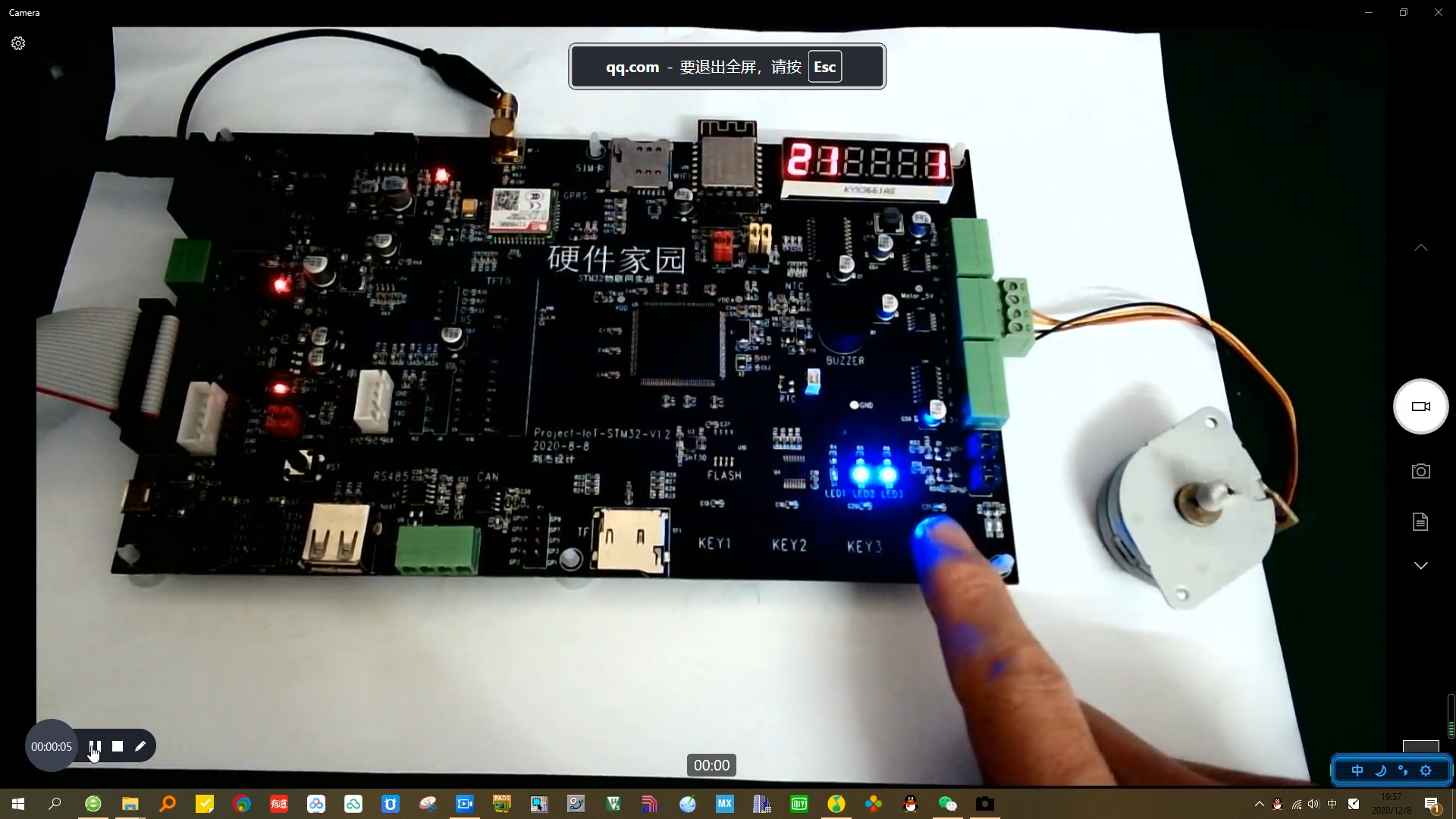
主要是使用到实战板右边沿三个电机中间的那一个。
3.1实验现象
3.1.1串口助手
3.1.2实战板
和上面单极性的步进电机一样,区别就是用的是中间的那一个绿色的接口,电机是双极性步进电机。
数码管左边的数字为目标圈数,右边的圈数为实时的转数。
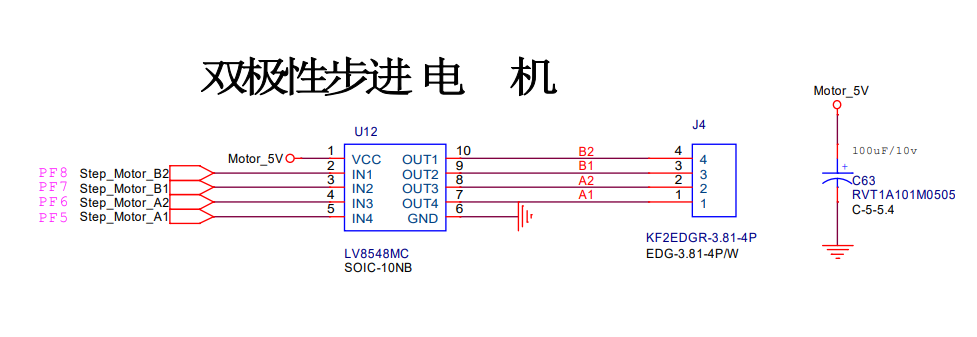
3.2硬件电路
使用的芯片中有两个 H 桥(8 个 MOS 管),电流最大可达 1 A ,采用 5V 供电,左边是连接单片机板的 4 个 IO 口。
3.3双极性步进电机
本项目使用到的是 2 相 4 线双极性步进电机,下图是它的内部结构示意图。

电机的双极性就体现上电机左右的两个线圈上电流均可以有两个方向。
两相和四线显而易见。
3.4单、双电机的对比
上面的单极性步进电机只需要 4 个 MOS 管就可以控制,双极性因为需要改变电流的方向,每一相都需要一个 H 桥来驱动,每一个 H 桥都需要 4 个 MOS 管,故共需要 8 个 MOS 管(使用的驱动芯片是满足要求的)。
所以说双极性的驱动电机,驱动电路更复杂一点,成本也更高一点。
那双极性步进电机的优势是什么?是双极性电机的结构简单简单一点,当一些产品中对体积的要求比较高的时候,双极性在体积更小的前提下可以提供更大的扭力。
3.5驱动方式
注意下图中的步距角 3.5° 是指本次实验中所用的双极性步进电机的步进角,其他的电机步距角并不一定是这个。
然后两个四拍的驱动针对八拍相当于一次走了两步。
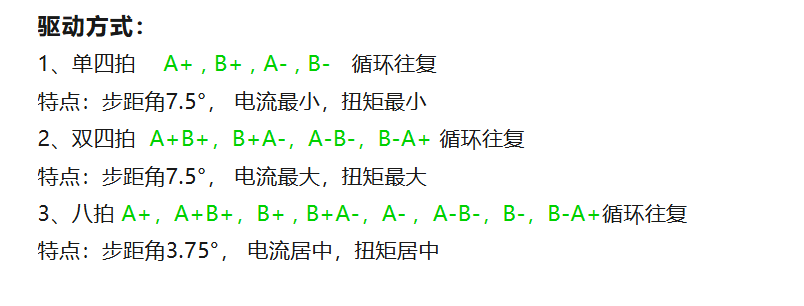
3.5.1单四拍
A+ 表示电流从 A+ 相流入,规律是电流从哪一项流入电机就会转动到哪一项的位置上,按驱动方式图的电流驱动方式电机的转动方向是逆时针,如下图所示。
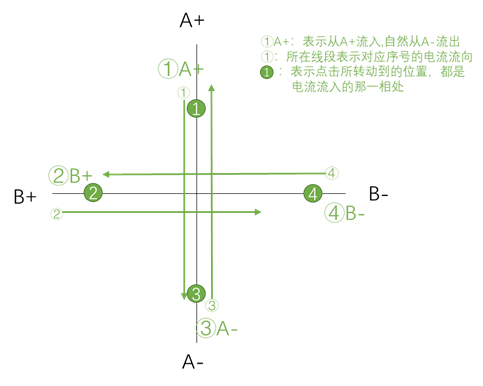
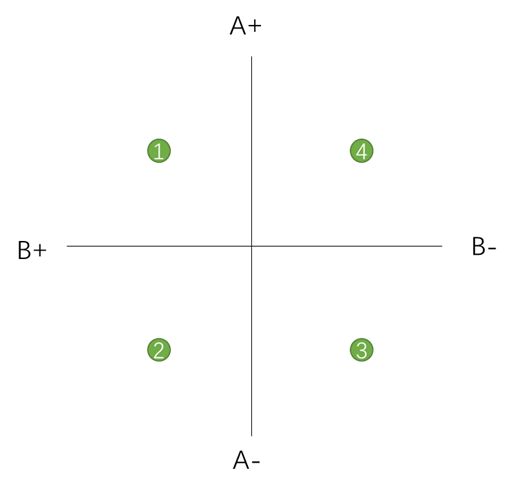
3.5.2双四拍
A+B+表示这两相线圈同时通电,电机受磁场的影响会转在这两相中间的位置,下图是电机转动方向的示意图,转动方向为逆时针。
3.5.3八拍
八拍就是结合上面两种驱动方式。
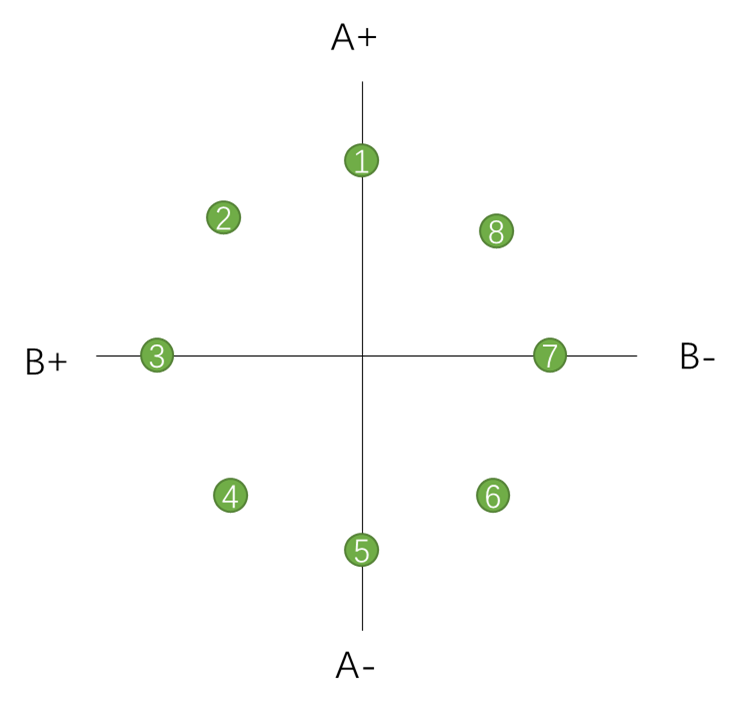
3.5.4总结
参见上面的2.4.5中的(4)(5)(6)(7)。
注意:软件部分我都是简单学习,涉及到一些过程操作,我都写的比较简洁,如果需要请自行购买硬件家园相关课程。
本文推荐:硬件家园公众号

















 3294
3294

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









