




mano hand
MANO(Metric-Affine Hand Model)是一个用于手部姿态估计的三维参数化模型,它能够模拟手部的形状和运动。MANO 模型是由德国马克斯·普朗克研究所(Max Planck Institute)开发的,旨在提供一个逼真的、低维度的、并且能够捕捉到手部非刚性变化的模型。MANO 模型能够适配任何人类的手形,并且与标准的图形软件包兼容 。
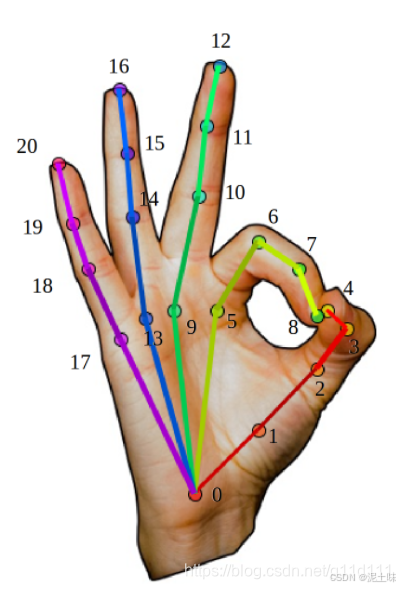
- meno hand有61个参数
- 3个相机参数:与x,y,z的旋转角
- 45个关节姿态参数,除去0号和手指尖的关节,其他15个关节各有3个参数
- 10个形状参数,用来确定手的形状,比如手指长短,手掌的宽度
Shadow Hand
- 共有31个参数
- 3个相机参数:与x,y,z的旋转角
- 6个旋转参数:用于控制手部的旋转,通过Gram-Schmidt 正交化可以唯一确定一个3x3的旋转矩阵
- 22个关节参数
- 5个手指的关节参数
- 每个手指的掌指既可以旋转也可以弯曲,有两个参数
- 每个手指的剩下两个手指只能弯曲,有一个参数
- 每个手指的最远端没有自由度,所以没有参数
- 2个手腕的关节参数
- 小指旁边的关节可以旋转,有一个参数
- 手腕的关节可以旋转,有一个参数
- 5个手指的关节参数
translation_values = [0.1, 0.2, 0.3] # 手部的位置
rot = [0.1, 0.2, 0.1, 0.1, 0.1, 0.1,] # 手腕的旋转
joint_angles = [0, 1, 1, 1, # fore 旋转2+弯曲2
0, 0, 0, 0, # middle 旋转2+弯曲2
0, 1, 1, 1, # ring 旋转2+弯曲2
0, # 小指处手腕
0, 1, 1, 1, # little 旋转2+弯曲4
0, # 拇指处手腕
1, 1, 0, -1 # thumb 弯曲2+旋转2
]
# 构造 hand_pose_ 数组
hand_pose_ = np.array(translation_values + rot + joint_angles)
hand_pose = torch.tensor(hand_pose_, dtype=torch.float, device="cpu") 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1887
1887




 到【灌水乐园】发言
到【灌水乐园】发言







