







一、介绍三色灯
在Arduino中,三色灯(RGB三色LED灯)是一种特殊的LED灯,它能够通过调整红(R)、绿(G)和蓝(B)三种颜色的亮度来产生各种颜色。RGB色彩模式包含这三种颜色,通过控制它们的变化和叠加,可以产生花式颜色。RGB三色LED灯的颜色值输出通常是通过PWM(脉冲宽度调制)来控制的。
二、项目目标
当光照强度越强时,三色灯越蓝,光照强度越弱的时候,三色灯越红。
若光敏电阻和1k电阻交换,则效果相反。
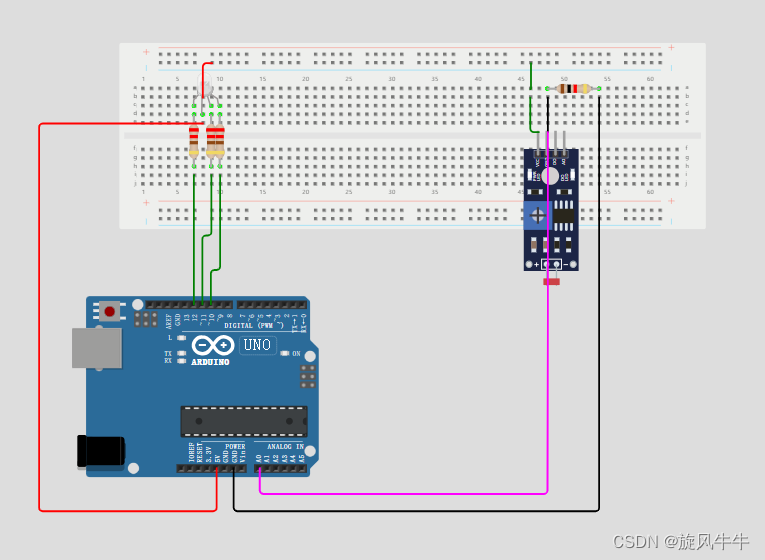
三、接线
四、源代码
const int guang = A0; // 定义一个常量整数变量guang,其值被设置为Arduino的模拟输入引脚A0
int RedPin = 11; // 定义三个整数变量,分别代表红色、蓝色和绿色LED连接的数字引脚
int BluePin = 10;
int GreenPin = 9;
int val;
static void colour(int red, int blue, int green); //声明colour函数
void setup() {
digitalWrite(RedPin,OUTPUT); //把RedPin、BluePin和GreenPin,用于控制连接到该引脚的LED
digitalWrite(Bl 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 325
325

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









