






超分辨定位技术在移动场景中具有极大的应用价值和广阔的应用前景。本文基于多输入多输出(MIMO)阵列技术与调频连续波雷达FMCW系统,针对包含极近邻多个相干信号源的移动定位问题,建立模型以实现移动场景的超分辨定位。
对于相干信源超分辨定位问题,我们主要从距离估计与波达方向(DOA)估计两个方面深入分析并获得了关键结论。在距离估计方面,其实质是阵列信号频谱成分的估计,我们基于 FFT 谱成份估计方法,分析了当前参数条件下的距离分辨率与数据频谱形态;在DOA估计方面,我们发现传统DOA估计算法无法对相干信源实现准确估计,因此深入研究了多种相干信源 DOA 估计算法,并结合问题与实际需求对不同算法进行性能评估,从而得到最适合的距离估计与角度估计算法组合,最终实现超分辨定位。
对于问题一和问题二,其主要目标是使用单周期 chirp 中频信号实现多组相干信源的定位。针对上述问题,我们采用基于FFT的距离估计算法;同时,通过比较多种DOA估计算法在不同场景和SNR情况下的均方根误差,评估不同算法性能,最终选取性能更好的MTOEP算法作为DOA估计算法。
对于问题三,其主要目标是物体定位与运动轨迹描述,需要使用单帧 chirp 中频信号实现对物体运动轨迹的描述。针对上述问题,我们在原有模型的基础上考虑了天线信号与
时间维的联合,通过距离多普勒像实现对目标速度和距离的大致估计,之后采用数据关联
实现物体在各个时刻的坐标关联,进而形成运动轨迹。此外我们还提出了一种基于测向交
叉定位超分辨率定位算法,该方法舍弃了传统的距离估计方法,通过移动平台的运动和DOA估计即可实现对物体的精确定位,具有广阔的应用前景。
对于问题四,其主要目标是考虑因老化而导致天线自身定位误差对物体定位精度的影
响,需要我们改进算法来增强鲁棒性。针对上述问题,我们首先结合实际生活场景考虑了
老化对天线产生的可能影响,并将基础算法与子阵分解和滑窗方法相结合,通过类平均的方法减弱天线自身结构变化对物体定位产生的负面影响,提升了算法的鲁棒性。
关键词:超分辨率定位;FMCW雷达;相干信源;DOA估计;MTOEP算法
1 问题重述
1.1 问题背景
在日常家庭生活中,人们可能需要花费大量时间去寻找随意摆放在家中某些角落里的
小物品,但如果给某些重要物品贴上电路标签,再利用诸如扫地机器人的全屋覆盖能力,
就可以精准定位到这些物体,极大地提升人们生活的便利性。而在智能辅助驾驶或者自动
驾驶领域,更需要精准探测邻近车辆、行人的位置及速度,来控制车速、转向和刹车等以
免发生意外。这些都属于移动场景定位问题。显然,定位的精度越高,应用价值越大,特别是超分辨率定位,具有广阔的应用前景。
现有移动场景定位产品通常采用调频连续波雷达 FMCW(Frequency-modulated Continuous-wave),通过发射线性增长频率的信号波,以及接收反射回来的信号波来进行定位。由于其不存在测量盲区、距离分辨率高、发射功率小、硬件结构简单等特点,FMCW技术被广泛应用于定位系统中。FMCW技术的定位精度取决于其带宽的大小,在大带宽的情况下可以取得很高的定位精度。
当前,多输入多输出(Multi-input Multi-output,MIMO)阵列信号处理已经成为通信信号处理中的一大热点,而其中利用超分辨算法对空间的多个信号进行波达方向(Direction of Arrival,DOA)估计更是引人注目。DOA估计的基本问题就是确定同时处于空间某一区域内多个感兴趣的信号的空间位置,其分辨率主要取决于阵列的长度,阵列长度确定后,分辨率也就被确定,称为“瑞利限”。超瑞利限的方法称为超分辨方法[1]。
目前使用最广泛也是最早的两种对波达方向进行超分辨估计的算法主要是多重信号分类(MUSIC)方法和旋转不变技术(ESPRIT)方法。但是,以上算法均假设信源之间相互独立、互不干扰,在此假设下,DOA估计算法具有良好的估计性能。而实际应用场景中,信号的传输相对复杂,入射到阵元上的信号之间一般会存在相干关系。在雷达信号处理中,大量的相干源信号会导致信号在恒虚警处理时出现干扰,进而导致信号的 DOA 估计不准确。
除此之外,现有移动场景定位产品大多采用基线算法,其得到的分辨率较低,不能满
足日益增长的超分辨定位需求。因此,亟需通过建模以及设计对应算法来提高分辨率,以提升产品竞争力。
1.2 问题描述
基于上述研究背景,题目提供了移动平台在不同场景下采集的 FMCW 雷达中频信号数据,围绕移动场景超分辨率定位问题,本文将解决以下四个问题:
1. 针对提供的无噪声仿真数据,建立定位模型,计算出物体相对位置,并以二维极坐标 图(横坐标表示距离,纵坐标表示角度)展示。
2. 针对提供的高斯噪声仿真数据,利用一个 chirp 周期内的 IF 信号,设计超分辨算法精 确定位多个物体。
3. 设计在线低复杂度算法,利用一帧中频信号来超分辨定位,并且通过数值实验验证算法性能。针对提供的一帧数据,计算出物体相对运动轨迹,并以二维图(横坐标表示距离,纵坐标表示角度)展示。
4. 考虑实际场景中由于老化等原因,天线阵列对于自身的定位也会有误差。针对提供的 仿真数据,设计提升定位算法的鲁棒性的改进算法。
2 模型假设与符号说明
2.1 模型假设
1. 在各个场景下,均假设有 K(需要确定)个物体在雷达的探测范围内(以原点为中心 半径10米以内、开口向上张开圆心角为100°的扇形区域);
2. 调制好电磁波的波形后,NTX个发射天线依次进行发射,NRX个接收天线也依次接收到 回波。由于此周期极短,等效成NTX×NRX个天线同时发射接收;
3. 由于chirp周期(~50微秒)内时间极短,认为此周期内物体静止不变。在一帧时间内, 物体的相对位置有明显的移动;
4. 当信号峰值位于同一个分辨单元内时,假设其为同一个信号。
2.2 符号说明
| 符号 | 含义 |
| sT sF T N f L γ N a 0f N ∆R B fIF | 雷达采样间隔 雷达采样频率 chirp周期 一帧中频信号的chirp数 天线孔径 调频斜率 天线阵列个数 载频 单chirp周期内采样点数 距离分辨率 调频带宽 中频信号频率 |
3 问题分析与求解思路
3.1 问题分析
3.1.1 问题一
问题一要求针对提供的无噪声仿真数据,建立定位模型,计算出物体相对位置。
物体相对位置的求解是一个二维估计问题,变量分别为距离和角度。对于距离维求解可以使用 FMCW 中频信号本身的特性进行计算,对于角度维求解则是一个阵列波达方向(DOA)估计问题。传统的 DOA 估计方法直接使用波束形成来实现,但是这种方法无法分辨出两个角度差小于波束宽度的目标,存在分辨率上限,即瑞利限。问题中的超分辨算
法则是突破了瑞利限的DOA估计算法。
在信源信号相互独立的情况下,经典 DOA 估计算法已经能够得到较高精度的估计结果,如MUSIC算法利用信号子空间和噪声子空间之间的正交性进行DOA估计,基于旋转不变技术信号参数估计(ESPRIT)方法则是将天线阵列划分成大小相同的两个子阵,利用两个子阵之间的关系进行DOA估计。但DOA估计实际技术应用场景通常很复杂,阵列接收信号间很少存在完全独立、互不相关的情况,如本题场景中不同物体的回波信号间存在相干关系时,信号子空间与噪声子空间不完全正交,使得经典的DOA估计算法失效。
因此,针对相干信源的超分辨 DOA 估计技术是本问题研究的重点,即如何有效实现解相干。实现解相干一般分为降维和非降维处理,降维处理通过牺牲阵列自由度来达到解
相干的目的,非降维处理对信号协方差矩阵进行特定的变换,没有损失阵列孔径,但是由于实施了某种变换,所以会造成DOA估计精度的损失。另外的如基于稀疏恢复/压缩感知的DOA估计,通过构造信号稀疏矩阵,通过求解凸函数进行DOA估计,其优点是对信噪比不敏感,能够处理相关信号,角度分辨率高,缺点是计算量会比较大。但对于移动场景的超分辨问题,算法的实时性与低复杂度应该是首要考虑的。
3.1.2 问题二
问题二要求针对提供的高斯噪声仿真数据,设计超分辨算法精确定位多个物体。
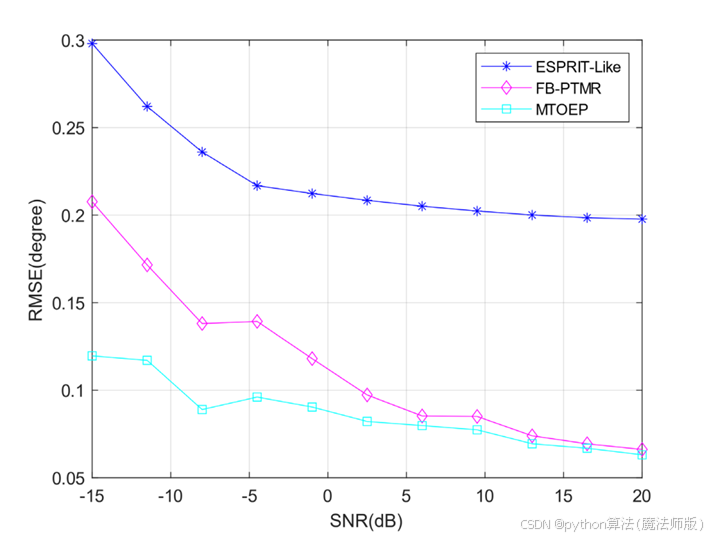
在本问题中,距离估计通过对中频信号的FFT实现距离压缩,达到测距的目的。角度估计首先使用波束形成方法大致估算信源方向,然后使用盖尔圆法进行信源数估计。之后通过数值实验,比较几种超分辨 DOA 估计方法在不同场景的性能对比,根据均方根误差结果选择最适合本场景的方法。相比问题一,问题二在信号数据中加入了高斯噪声,因此在问题的处理过程中要注意考虑噪声对于信号处理的影响。
3.1.3 问题三
问题三提供一帧中频信号,要求我们设计在线低复杂度算法,计算出物体相对运动轨迹。
问题三是问题一、二的延伸,相比于前两个问题,问题三提供了多个 chirp 周期的数据。单 chirp 周期内认为物体静止不变,而在一帧时间内物体的相对位置有明显的移动。可利用一帧中频信号进行方位向FFT估计目标速度;进行距离维FFT估计目标距离;依据几种不同 DOA 估计算法的性能对比结果,选择最适合本场景的角度估计方法。同时,在此基础上对模型进行改进,比如结合移动平台在不同观测位置的坐标以及 DOA 估计值,采用测向交叉定位等方法,实现对多个物体的精确定位。
3.1.4 问题四
问题四考虑到实际场景中天线老化等原因对于天线阵列定位误差的影响,对一个chirp周期内的中频信号进行处理。
问题四是前三个问题在实际应用中可能面临的情况。因此,对于这一问题的处理,可
以在前三个问题的模型基础上进行改进,增加天线阵列阵元位置偏差等对于信号处理结果
影响的考量。在实际情况中,若天线老化程度极其恶劣,超出模型稳定度范围,用户可能
会直接将其舍弃。因此算法所关注的老化程度更应该刚刚开始老化的时候。在前三个问题
的基础上,将基础算法与子阵分解和滑窗方法相结合,通过类平均的方法等减弱天线自身结构变化对物体定位产生的负面影响。
3.2 求解思路
针对上述问题的整体求解思路如下图所示:
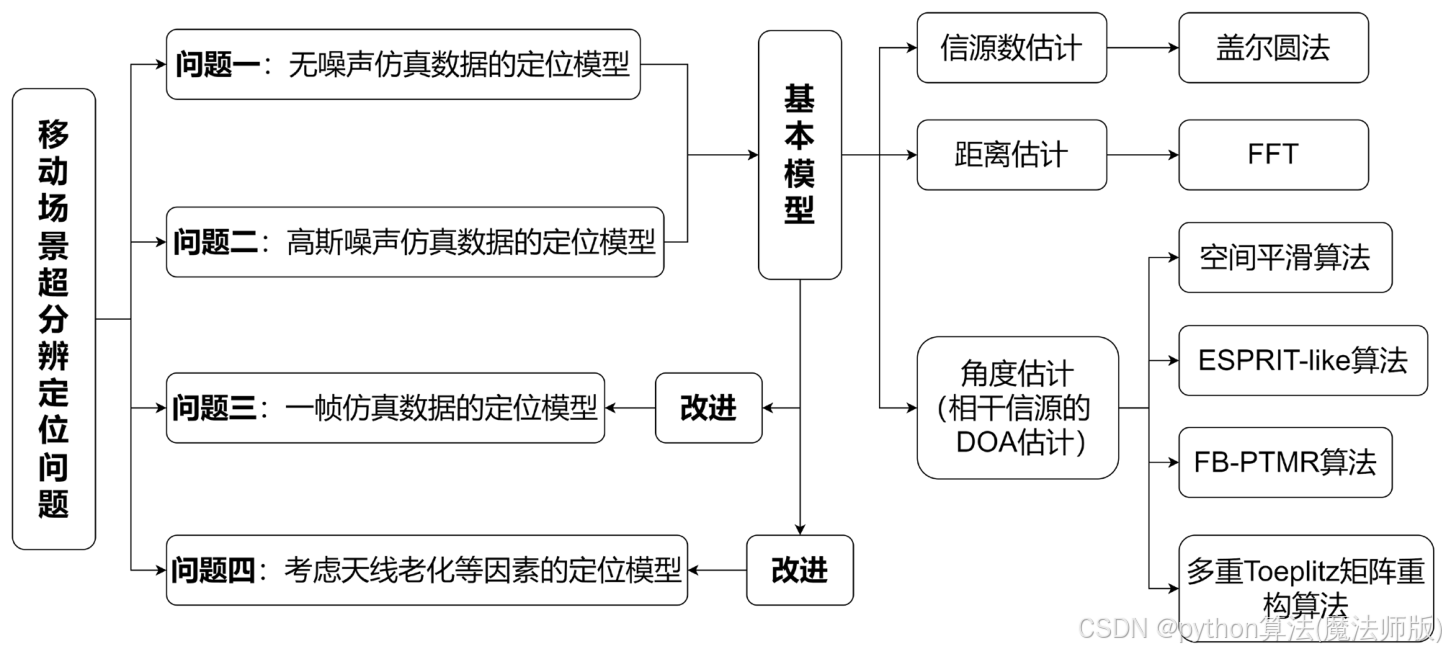
图 3-1 问题求解思路示意图
4 基本模型
4.1 信源数估计
信源数估计是空间谱估计中一项十分关键的技术,它直接影响到信号检测、参数估计、波形恢复的精度和准确度。对于大部分的超分辨算法来说,都需要已知空间中的信源数目,如在雷达信号处理中广泛采用的MUSIC、ESPRIT等,算法的性能直接依赖于源数目的准确估计,源数目过估计或欠估计的情况下,算法性能会受到很大影响[2]。
H T Wu 等提出了一种与信号模型无关的盖尔圆法[3](Gerschgorin disk estimation,GDE),该方法综合利用观测信号协方差矩阵的特征值和特征向量信息,在白噪声及有色噪声情况下都适用。
盖尔圆法利用观测信号协方差矩阵的盖尔圆半径的大小实现源数目估计。通常协方差矩阵的信号盖尔圆和噪声盖尔圆没有明显区别,需要依据盖尔圆定理对协方差矩阵进行一定转换,使得转换后的协方差矩阵的信号盖尔圆半径明显大于噪声盖尔圆半径,即变换后协方差矩阵的盖尔圆盘被划分成半径大小不同的两部分,半径大的一部分是信号盖尔圆,半径小的一部分是噪声盖尔圆,这样才能依据盖尔圆半径实现对源信号数目的可靠估计。
盖尔圆法的基本原理如下:
求阵列接收信号的协方差矩阵R,并对R进行分块
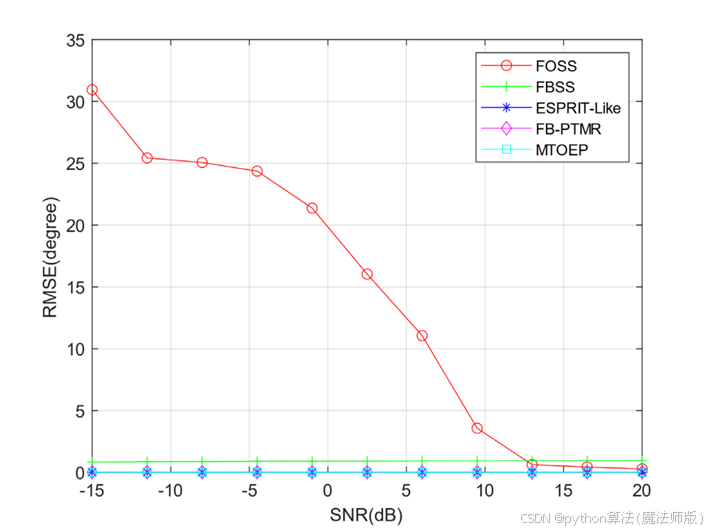
该场景实验结果说明,除FOSS方法外其他4种方法在不同信噪比下均可正确求得结果。因FOSS算法对相干信源DOA估计性能不佳,进行剔除。
场景2:双目标距离都为7m,角度分别为-0.2°和0.2°,物体反射系数相同,结果图如下:
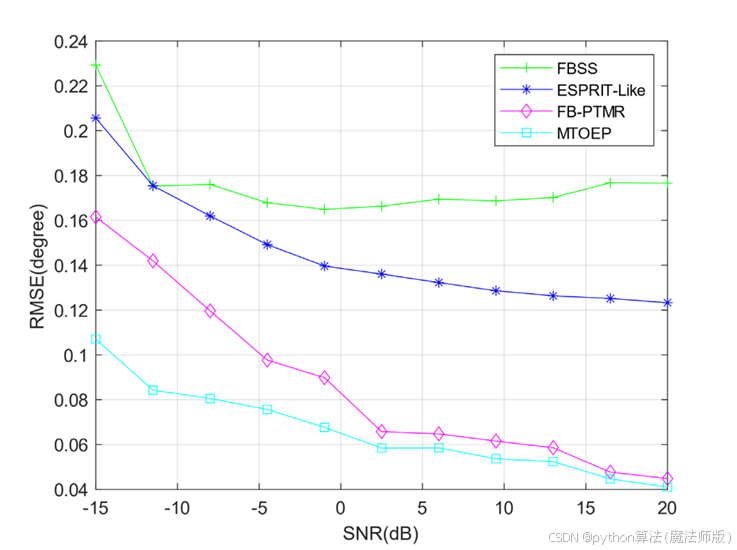
场景3:双目标距离都为7m,角度分别为-0.2°和0.2°,物体反射系数为10:1,结果图如下:
场景实验结果说明,FB-PTMR方法与MTOEP方法性能接近,误差在0.1°内,且结果随信噪比变化不大,可能的原因是目标信号间的幅度差影响了小目标的角度估计结果。FBSS对目标反射系数较为敏感,鲁棒性较差,进行剔除。
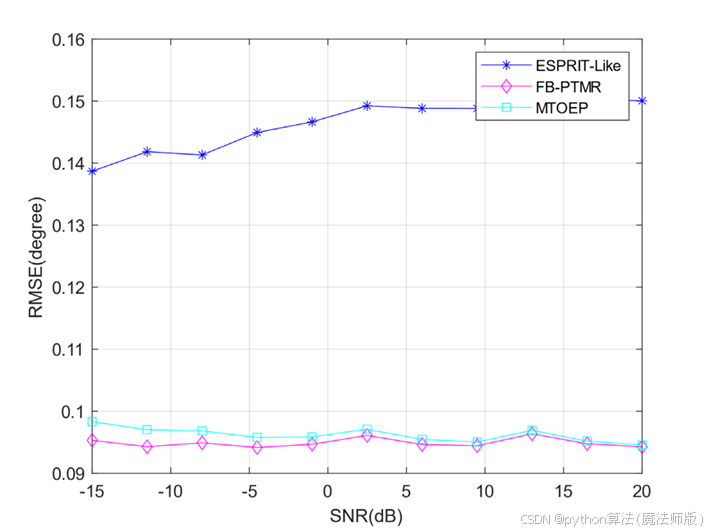
场景4:双目标距离分别为6m和8m,角度分别为-0.1°和0.1°,物体反射系数相同,仿真测试算法在目标角度差很小,距离差较大的情况下算法的性能,结果图如下:
首先使用盖尔圆法估计相干信源个数,得到结果为2。 距离估计
选取单一天线进行FFT变化得到如下结果:
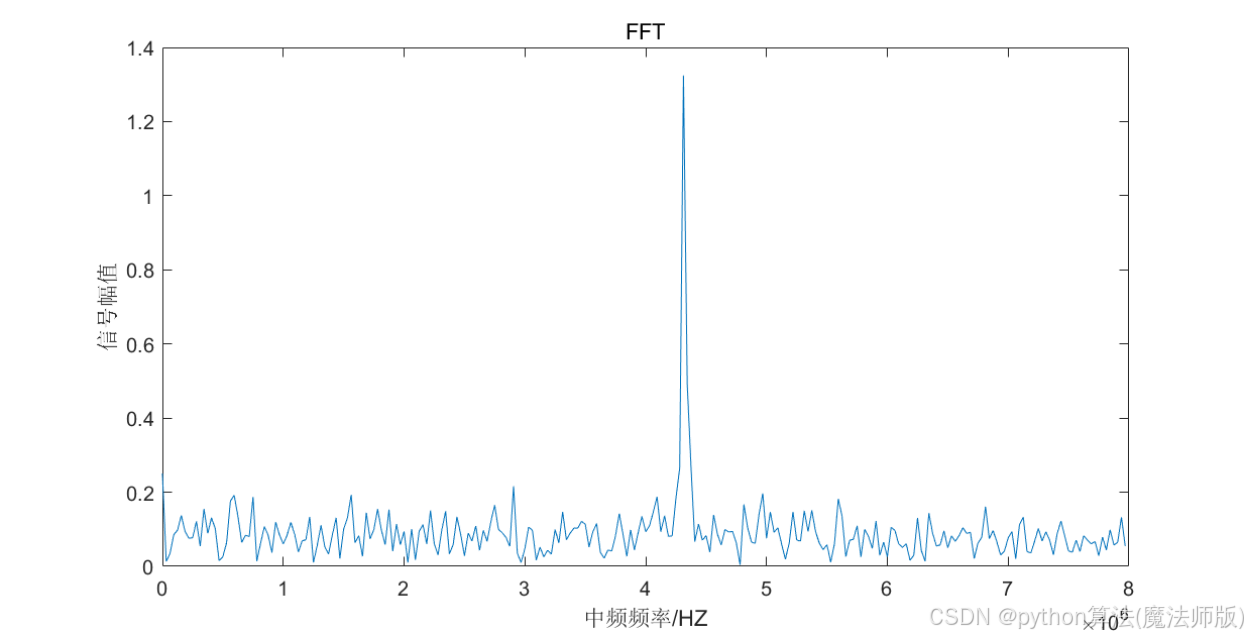
图 6-1 问题二距离估计结果
| 得到单一频率 | fIF | =4.3125MHz,说明两个物体径向距离差小于距离分辨率,十分接近。 | |||||
| 根据距离计算公式 | R 0 | c | IF | 可得,对应距离 | R 为8.1897m。 0 | ||
角度估计
采用多重Toeplitz矩阵重构算法DOA估计结果如下:
| 物体1 | 物体2 | |
| DOA(°) | -0.2864 | 0.3507 |
综合距离与DOA估计,我们可以得到物体二维坐标如下:
| 物体1 | 物体2 | |
| 径向距离(m) | 8.1897 | 8.1897 |
| DOA(°) | -0.2864 | 0.3507 |
极坐标表示如下:
9 模型评价
9.1 优点
1. 设置了几组数值实验进行定量性能分析,并选择了本场景下较优的算法;
2. 根据移动场景特点设计了一种仅使用 DOA 估计与移动平台坐标数据实现对多个物体的
超分辨率定位的算法,回避了距离分辨率过大的问题。
9.2 缺点
1. 距离维的分辨率相对较低,应考虑结合角度进行进一步优化;
2. 问题四只考虑了少量阵元出现老化的简单情况,没有考虑大量阵元均出现位置误差的复杂情况。
9.3 展望
移动场景中天线的自身定位是一个关键问题,如无人驾驶中定位的准确性决定着车辆的行驶安全,在实际移动场景中会包含很多固定的目标点,可以设计一种算法利用这些固定目标点对天线进行辅助定位。
在环境杂波较多的情况下对多个目标进行稳定跟踪较为复杂,此时单个天线阵列探测性能具有一定的限制,希望可以设计一种多天线阵列融合技术,通过布置在不同位置的多个传感器信息,提高目标的检测概率,扩大目标跟踪的范围,提高目标的跟踪精度。
| % 信源数估计 [row_length, col_length] = size(Rxx); R_new = Rxx(1:row_length-1,1:col_length-1); [V, D] = eig(R_new); D = diag(D).'; [D,I0] = sort(D); D = fliplr(D); V = fliplr(V(:,I0)); k = 1; while 1 GDE=abs(S(k,col_length))-1/(2*num_Samples*(col_length-1))*sum(abs(S(1:row_le ngth-1,col_length)));%调整因子取为1/N if GDE<0 ||k>col_length-2 break; end k = k+1; end num_est = k-1; |
| 2. 测向与DOA估计算法 |
| % 仿真信号生成 Ts = 1.25e-7; %采样间隔 T = 3.2e-5; %chirp周期 num_Samples = 256; %采样点数 t = (0: num_Samples-1)*Ts; kr = 78.986e12; %调频率 f0 = 78.8e9; %载频 c = 3e8; lambda = c / f0; f = (0:num_Samples-1)*(1/Ts/num_Samples); x = c.*f/2/kr; c*(1/Ts)/(2*kr*256) L = 0.0815; %天线阵长度 |


















 1052
1052

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











