






 本文详细介绍了如何在RS软件中进行机器人手动操作,包括启动工作流程、选择动作模式、查看关节轴位置、以及处理超出工作范围的错误。
本文详细介绍了如何在RS软件中进行机器人手动操作,包括启动工作流程、选择动作模式、查看关节轴位置、以及处理超出工作范围的错误。
打开RS软件,在最近里打开工作站。等待工作器变为绿色后,打开虚拟示教器。点击操纵杆左侧小方块,选到中间的手动,再把操纵杆上方的Enable激活,此时信息栏显示手动 电机开始。调整试图,将示教器和机器人放到一个界面中。
点击示教器左上方的菜单栏,然后点击手动操作,选择动作模式
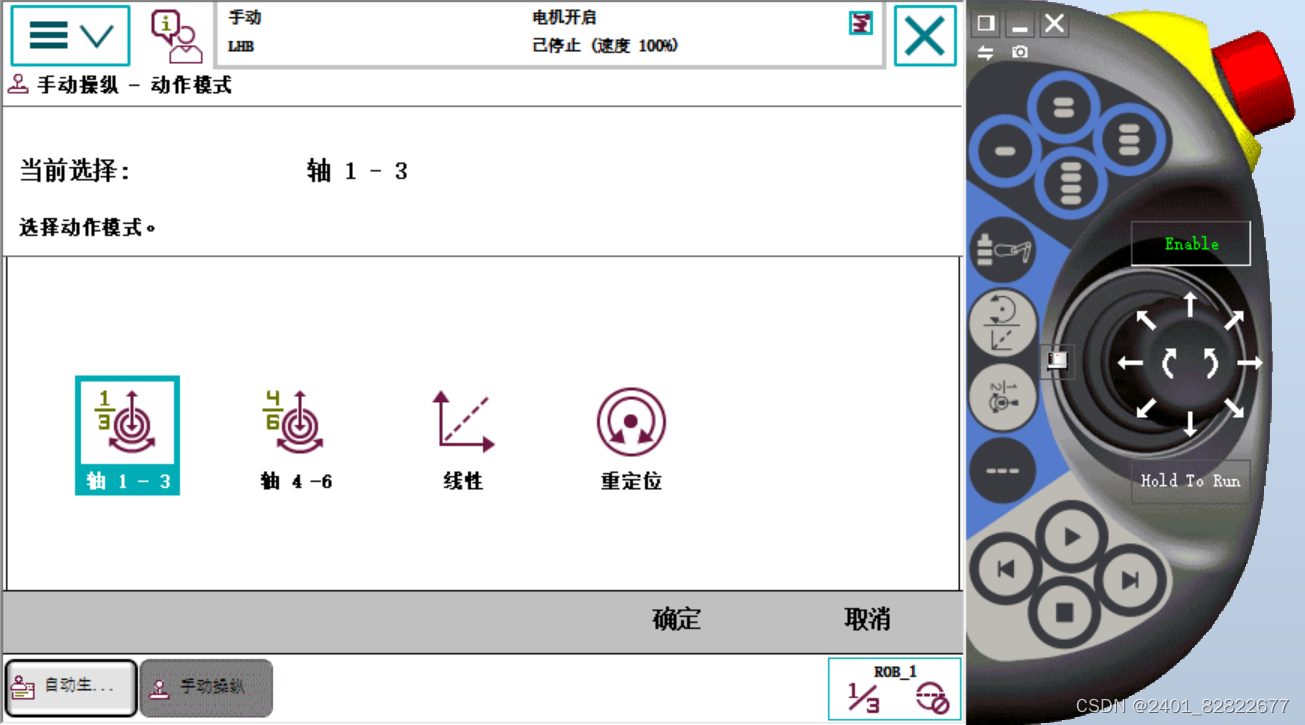 此时可以看到 轴1-3 轴4-6 线性 重定位
此时可以看到 轴1-3 轴4-6 线性 重定位
前面两个是单轴操作,选中轴1-3点击确定
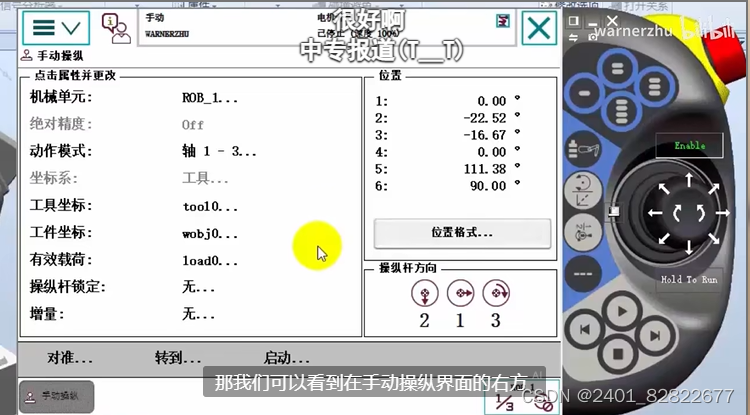 手动操作的右方,上方是位置显示,1-6分别代表机器人可以运动的六个关节轴。数字代表它们当前所处的角度。下方是操纵杆方向,箭头方向是正方向。通过操纵杆就可以控制机器人了。
手动操作的右方,上方是位置显示,1-6分别代表机器人可以运动的六个关节轴。数字代表它们当前所处的角度。下方是操纵杆方向,箭头方向是正方向。通过操纵杆就可以控制机器人了。
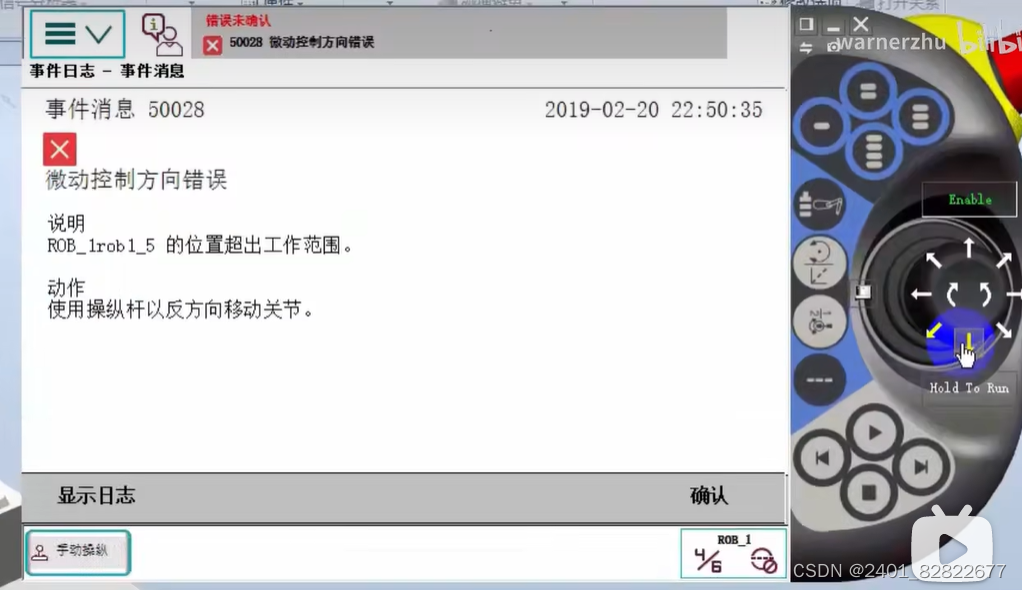 当出现操控错误的时候,此时此轴超出工作范围。现在要确定错误,然后使用操作杆以反方向移动关节
当出现操控错误的时候,此时此轴超出工作范围。现在要确定错误,然后使用操作杆以反方向移动关节

















 3338
3338

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









