









手动单轴操作
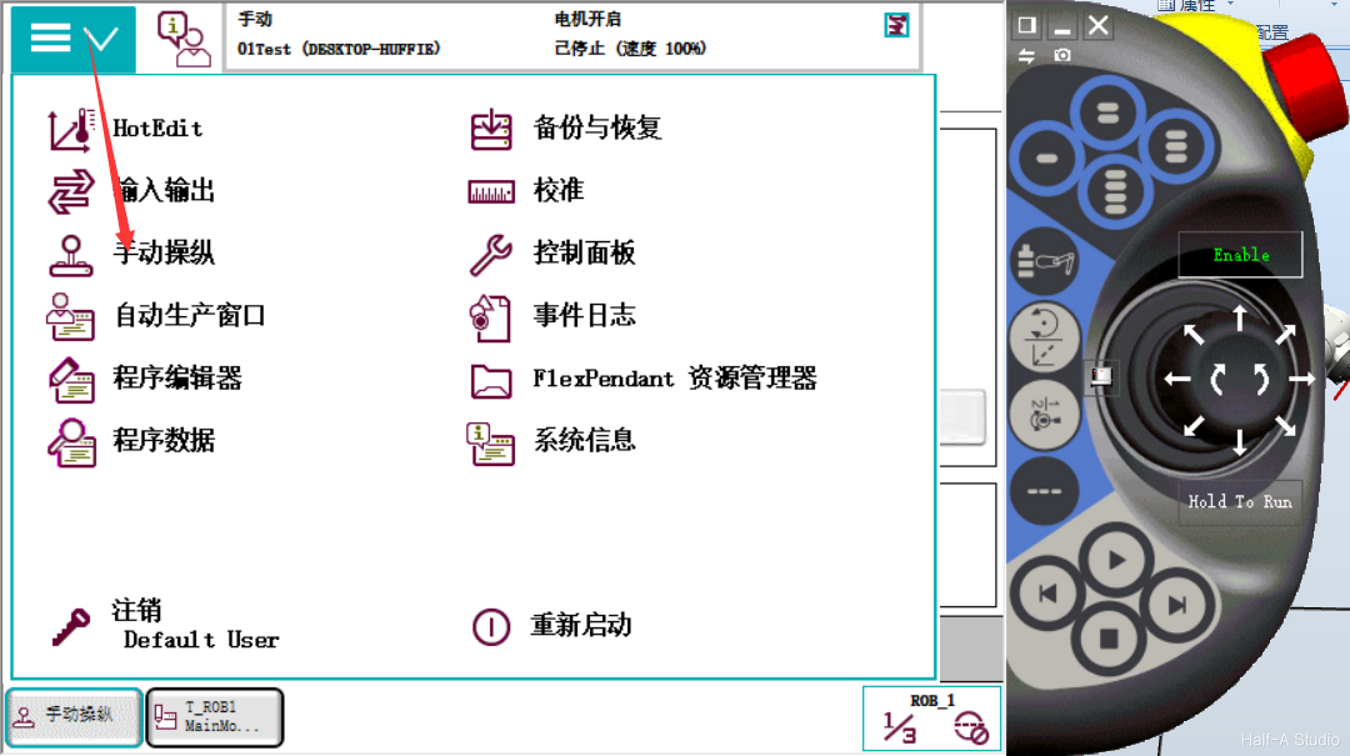
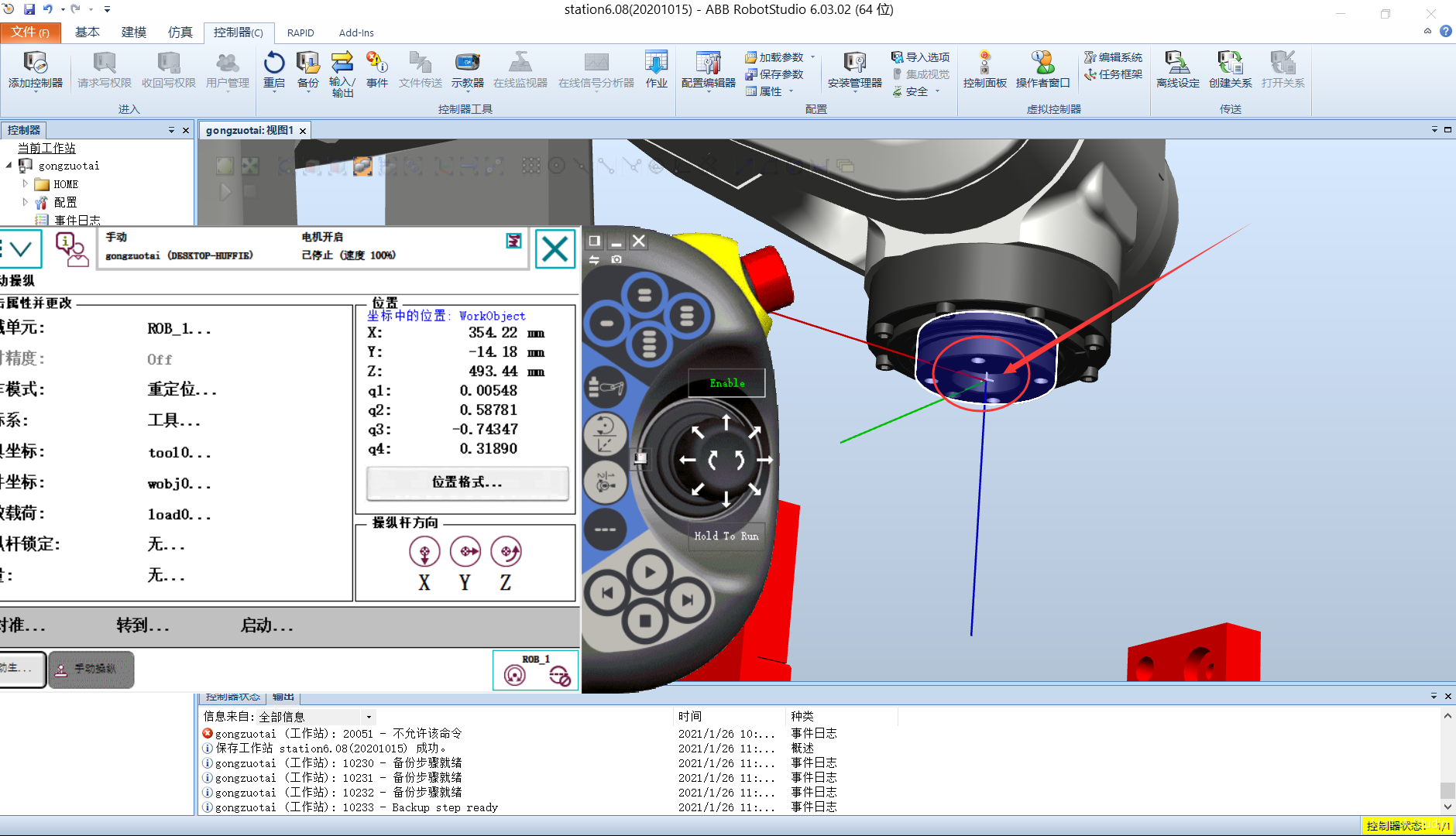
- 打开一个机器人系统,打开虚拟示教器
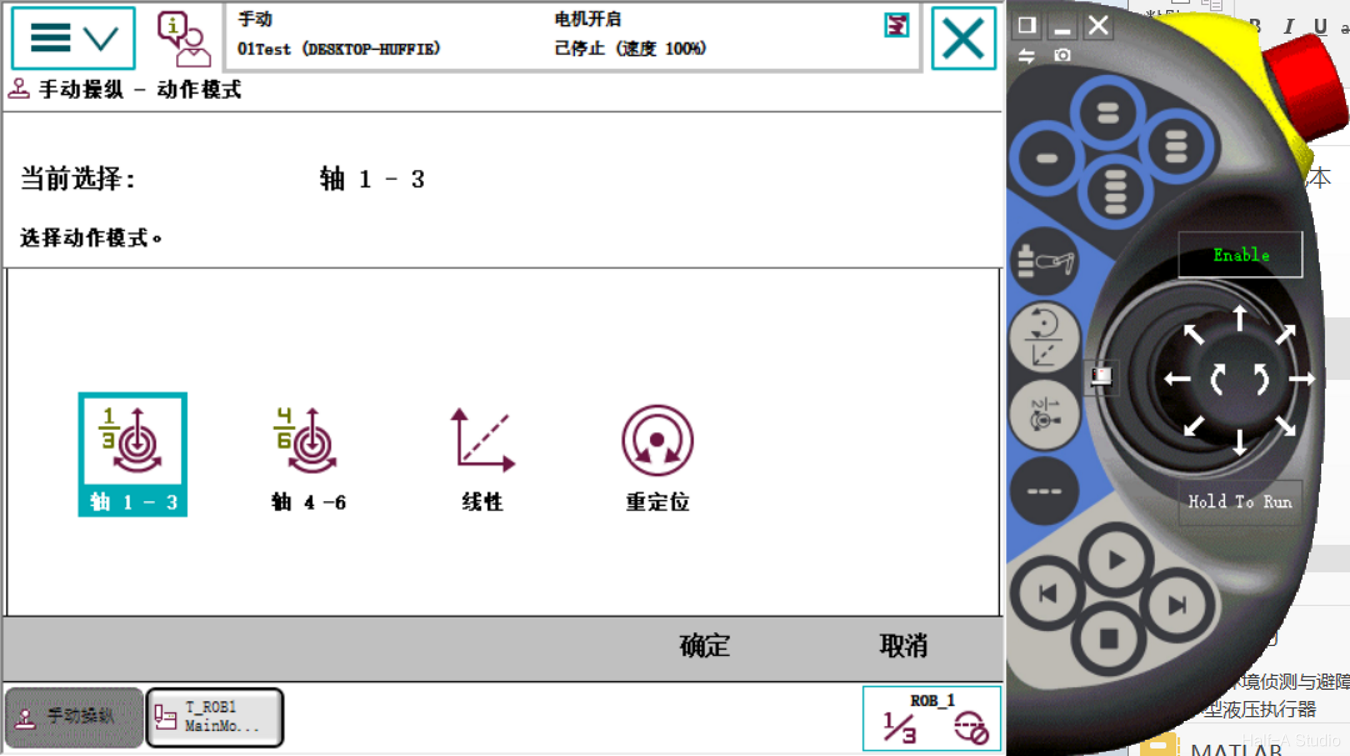
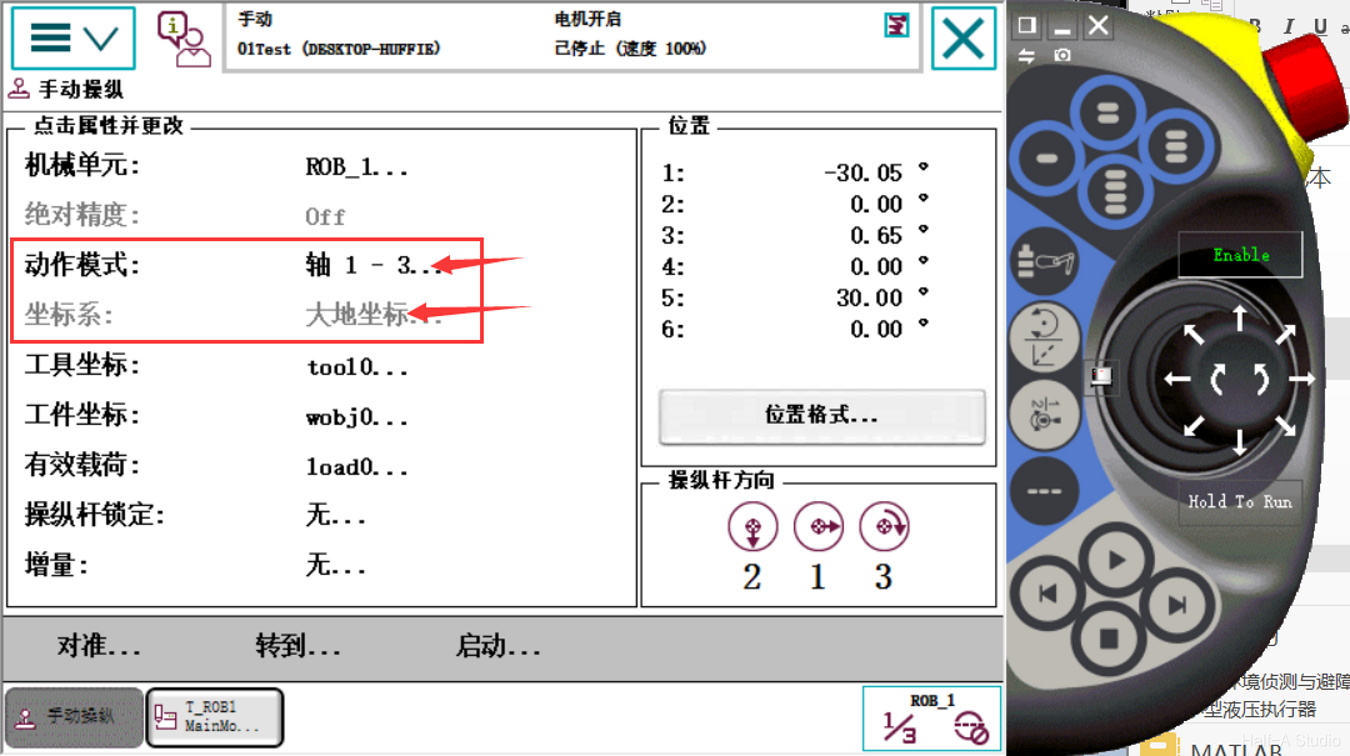
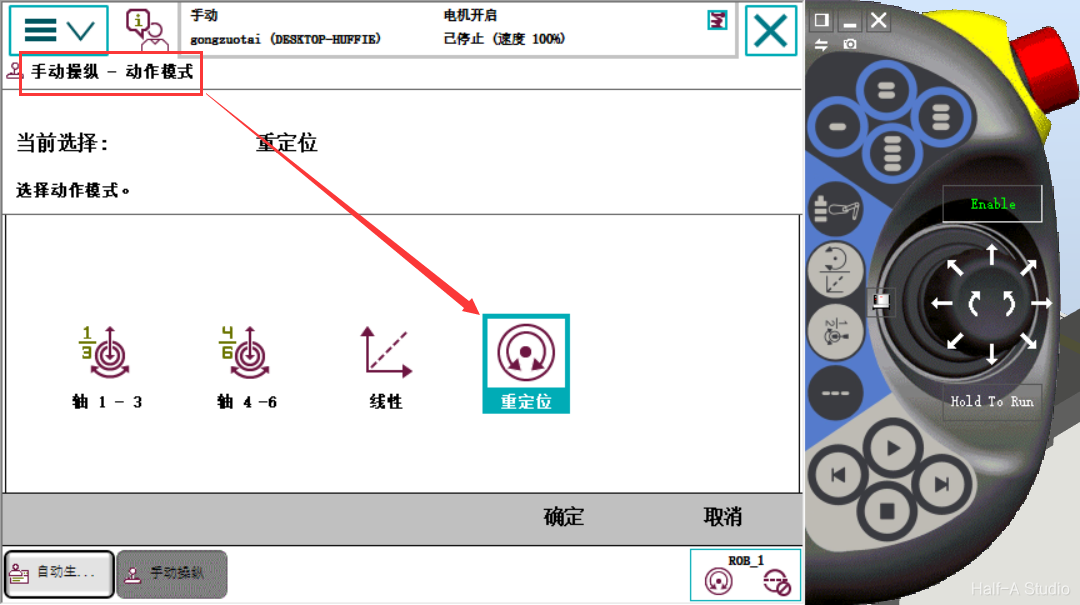
- 点击菜单-手动操纵-动作模式,可以看到下方有四个动作模型,其中轴1-3和轴4-6为单轴操作,后面是线性操作,和重定位操作,这里选择轴1-3,点击确定。
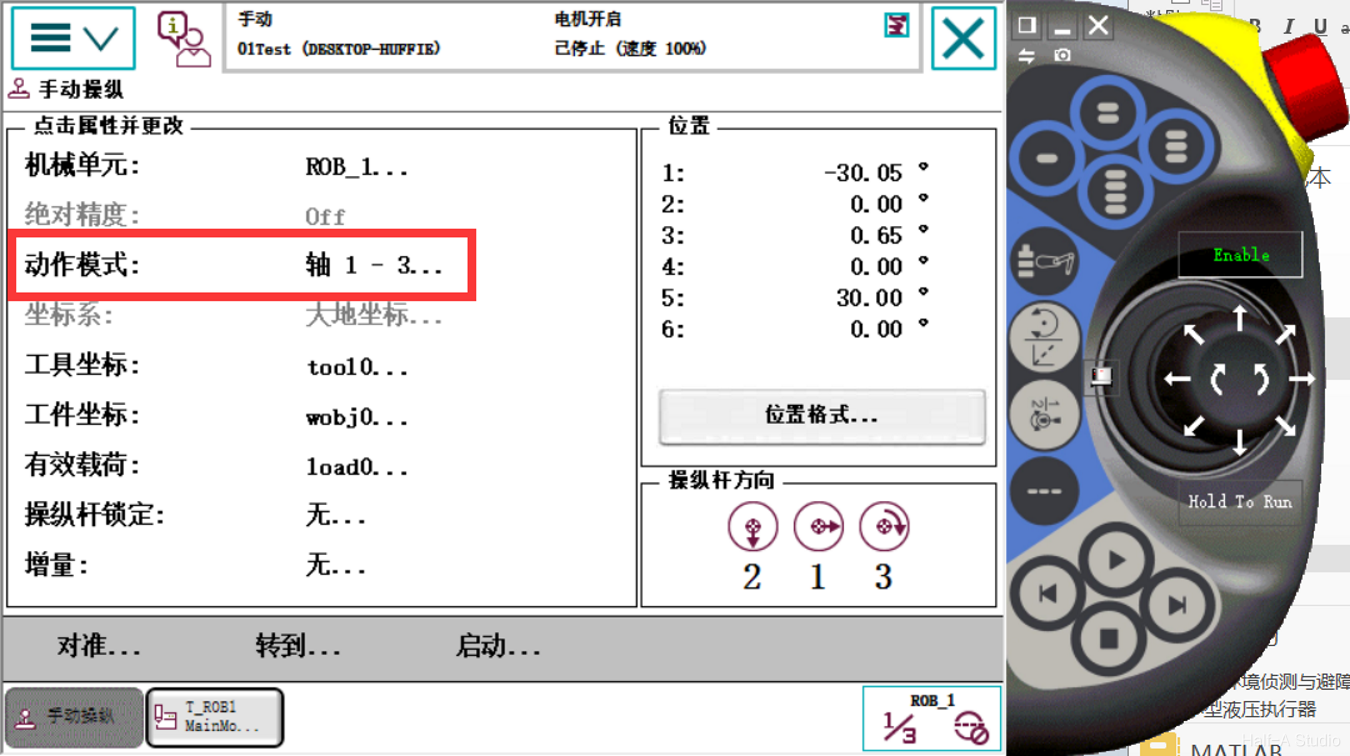
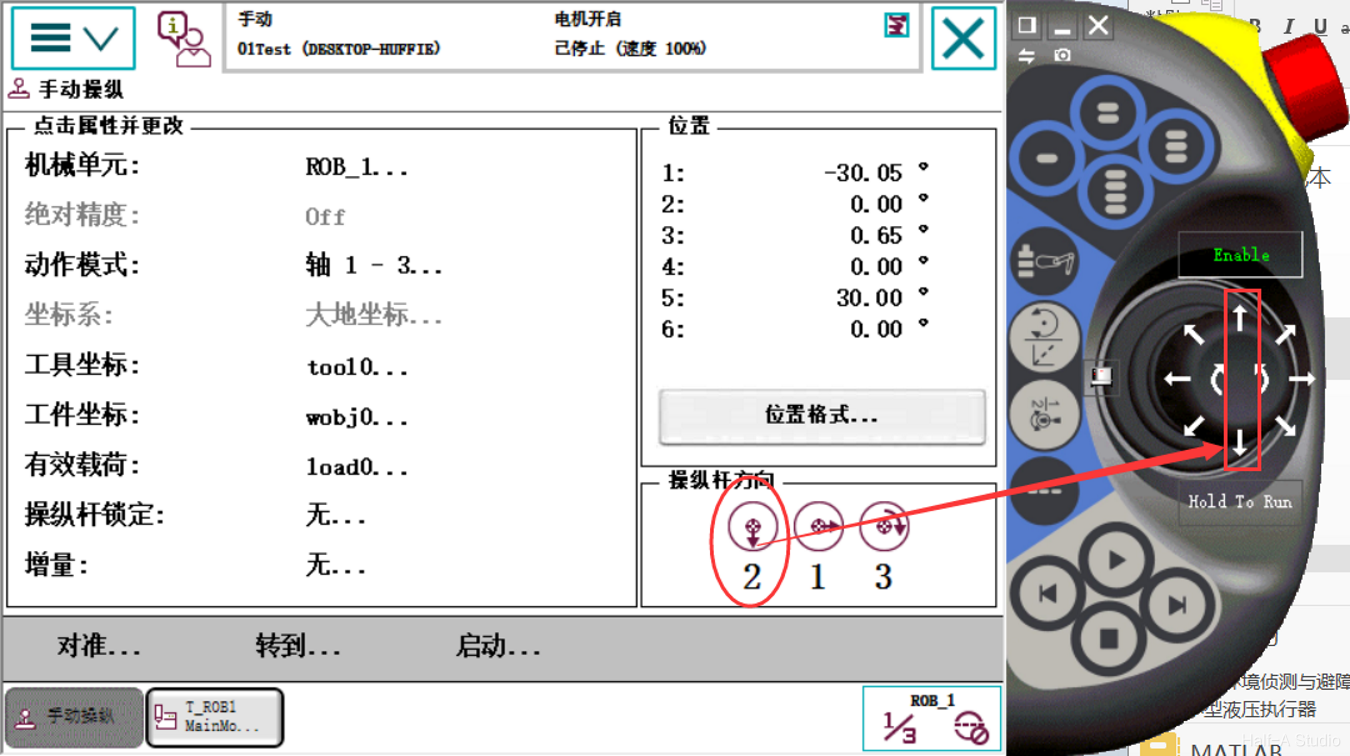
- 可以看到在手动操作界面右方有机器人的位置信息和操纵杆方向。 操纵杆方向处的箭头对应示教器控制器的箭头,数字代表轴的序号。 如第一个代表上下箭头控制二轴的运动,下箭头为正方向第二个代表左右箭头控制1轴的运动,第三个代表顺时针,逆时针按钮控制3轴的运动。如果想要控制4-6,点击动作模式选择轴4-6即可。
手动线性操作
- 进入手动操纵的菜单栏,可以看到现在的动作模式是单轴动作,坐标系不可选。
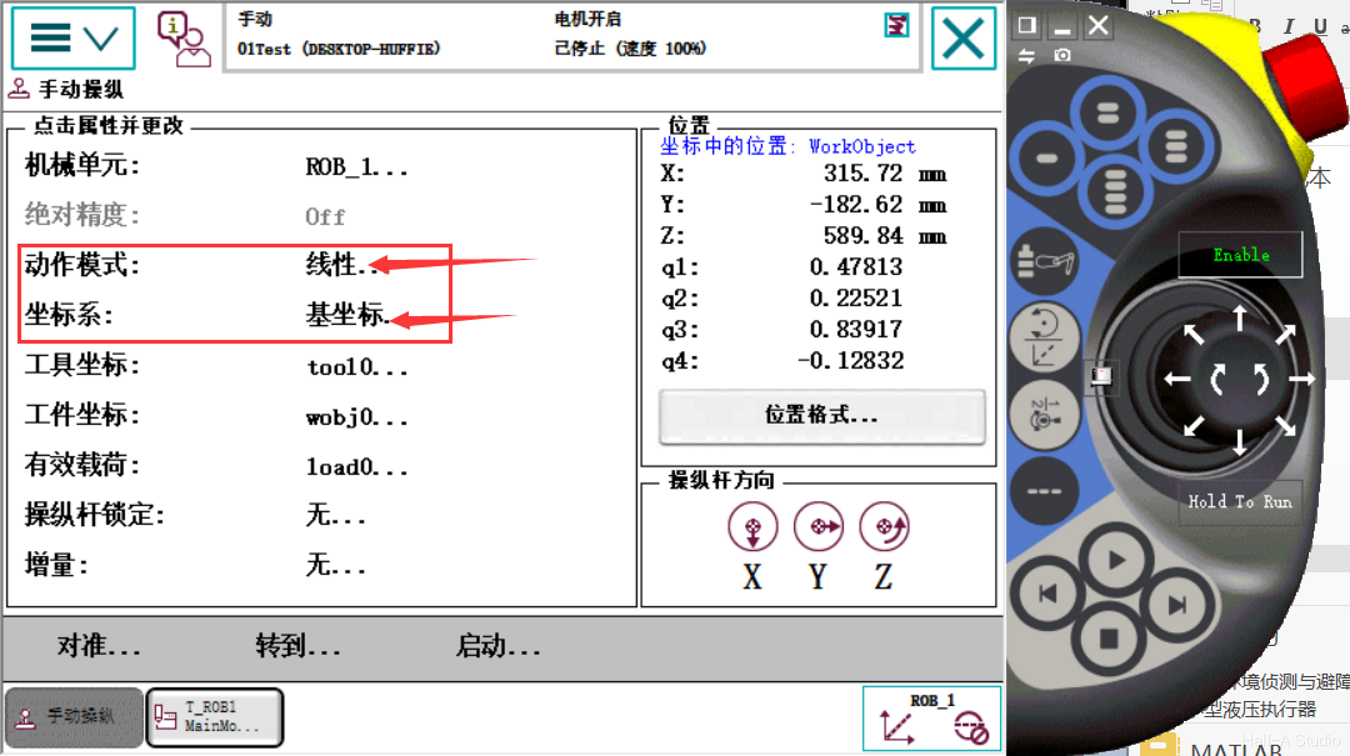
- 点击动作模式,将动作模式更改为线性,确定后,可以看到此时的坐标系可以选择了。
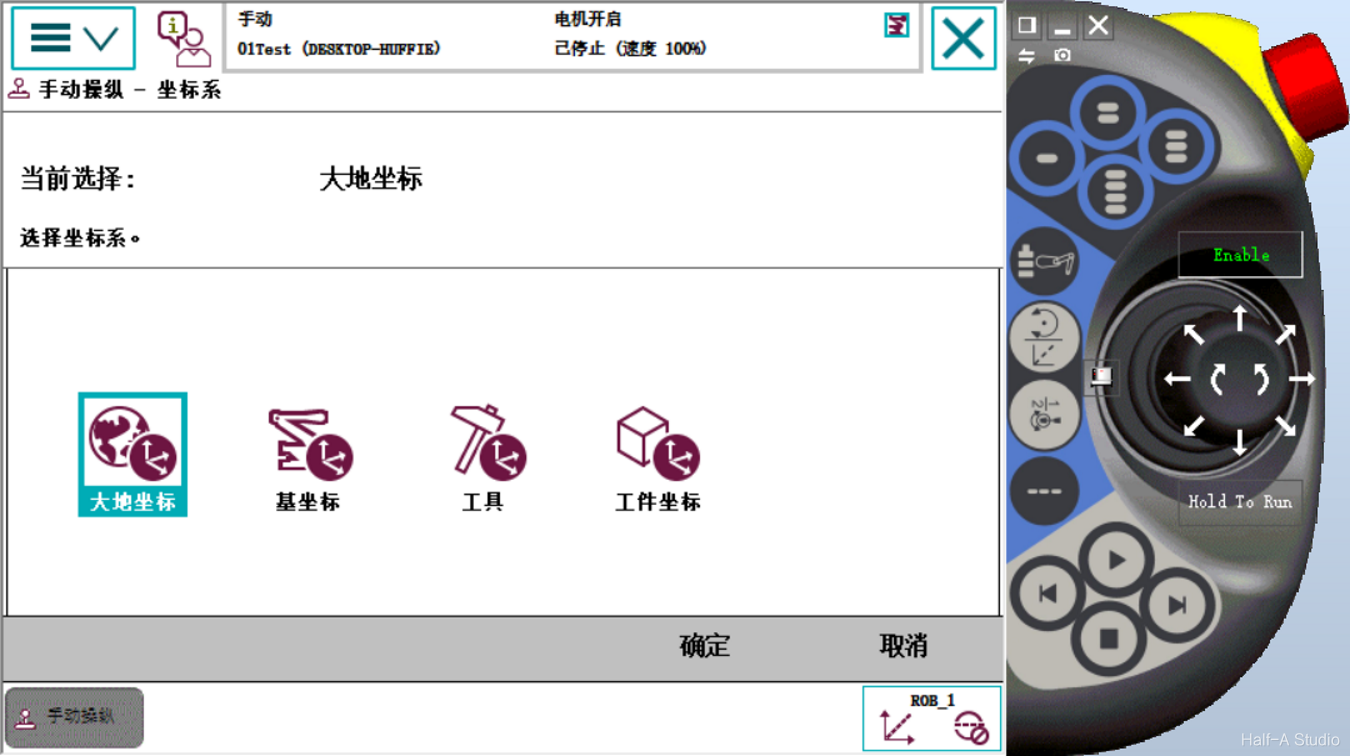
- 进入坐标系菜单,可以看到有四种坐标系,分别是大地坐标、基坐标、工具、工件坐标。
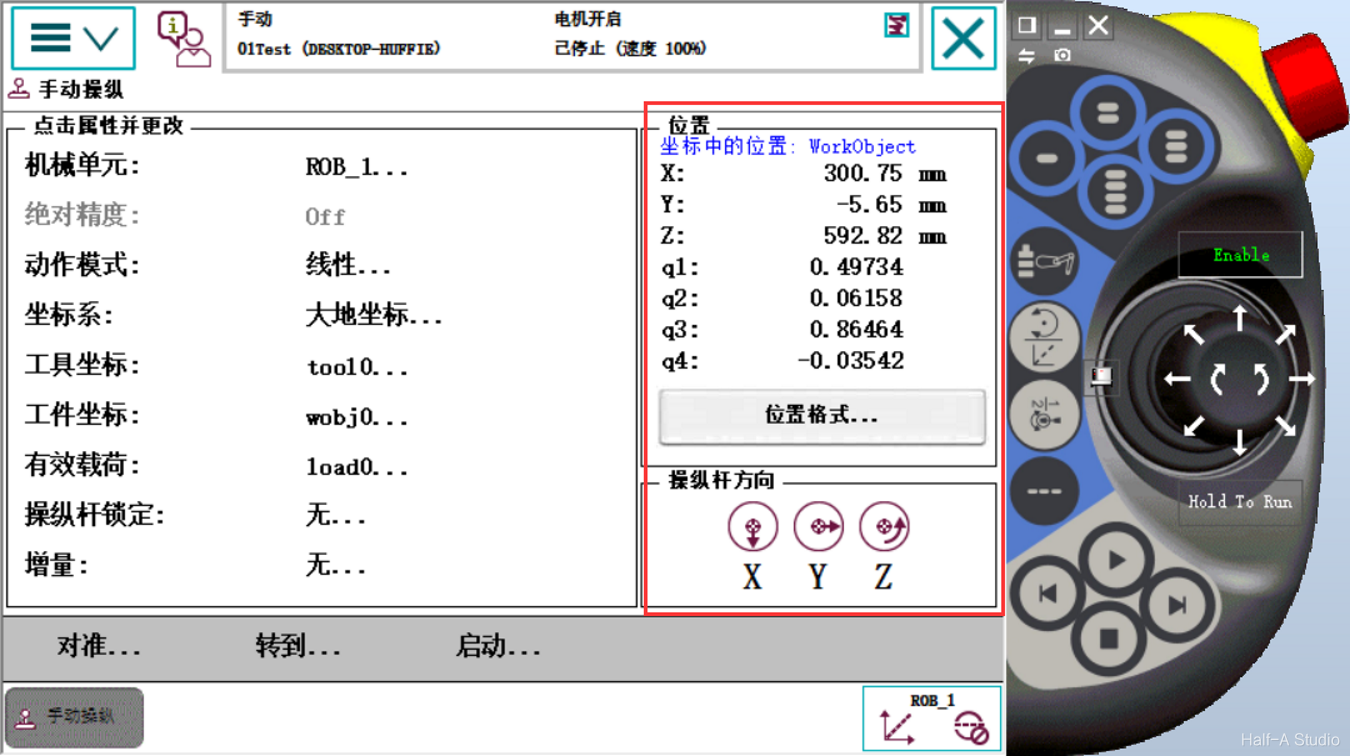
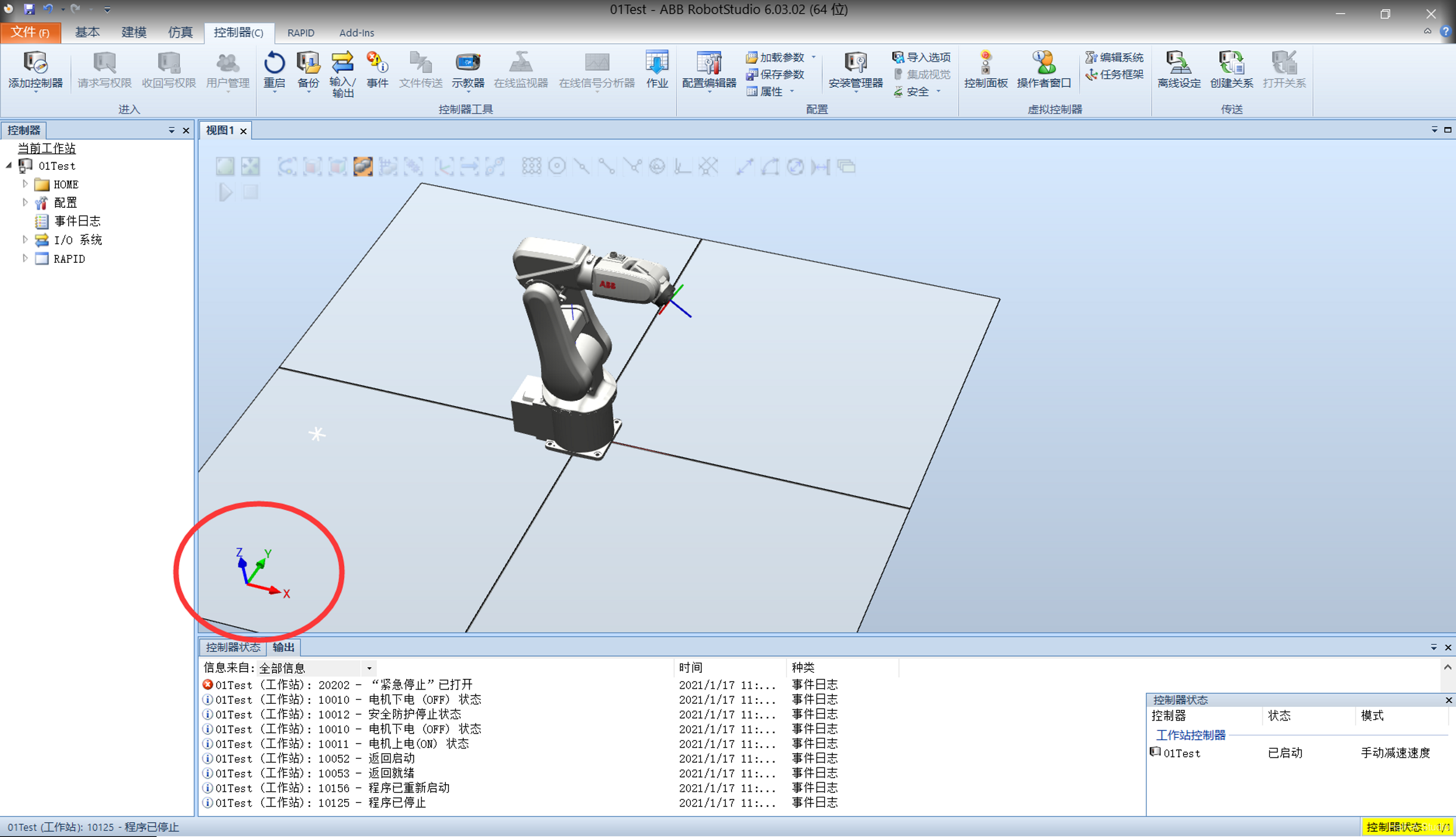
- 首先看大地坐标,选择大地坐标确定后,可以看到控制器右侧的位置信息变成了xyz坐标值。操纵杆方向也变成了xyz,大地坐标系就是以机器人视图左下角的坐标系为基准进行运动。
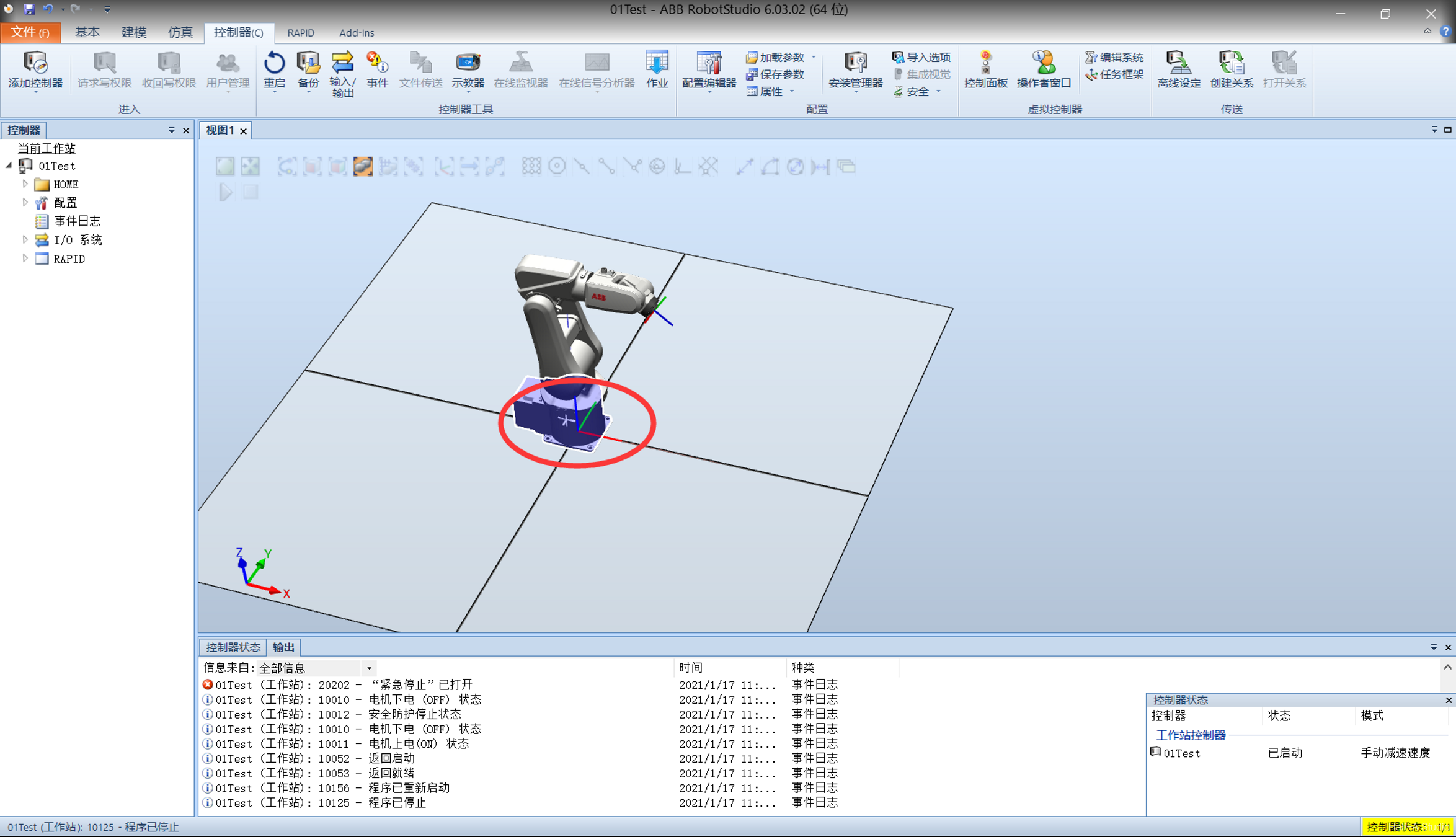
- 基坐标系,选中机器人底座,可以看到有一个坐标系,此时xyz就是沿着这个坐标系确定的。
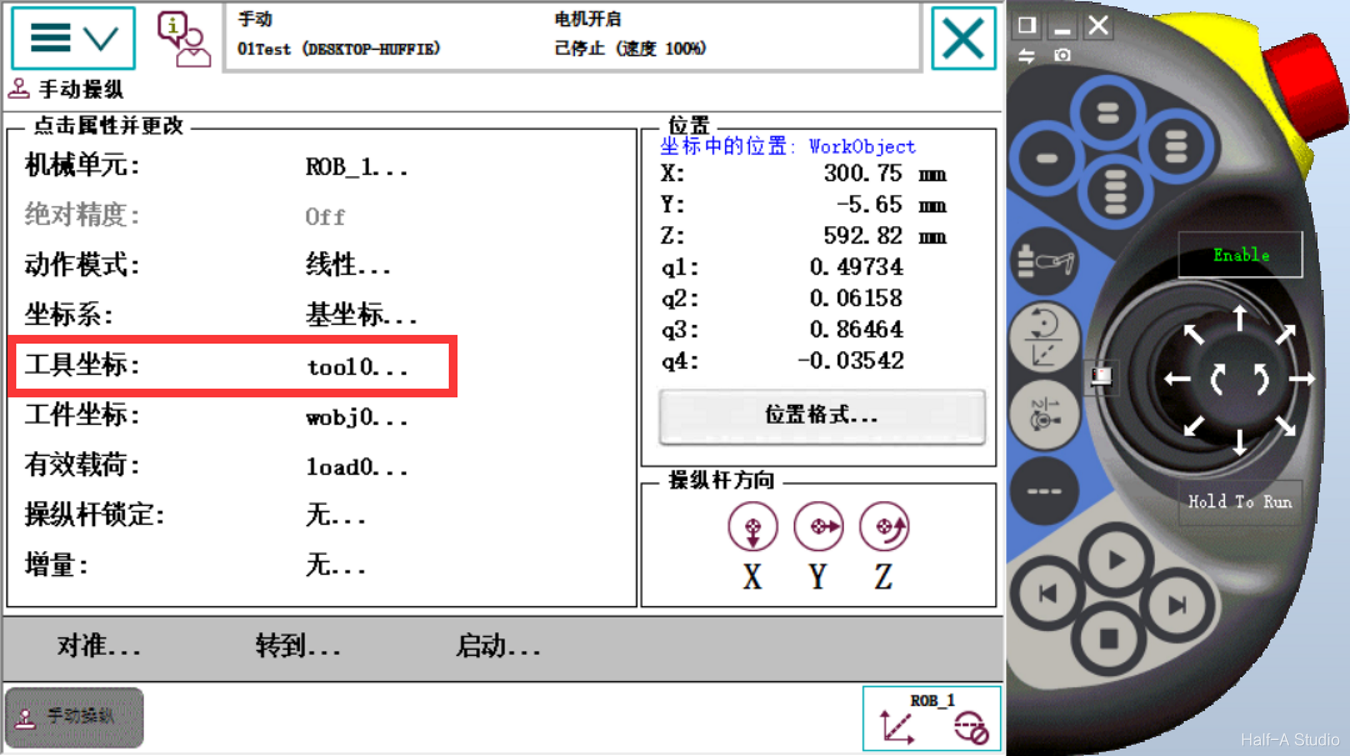
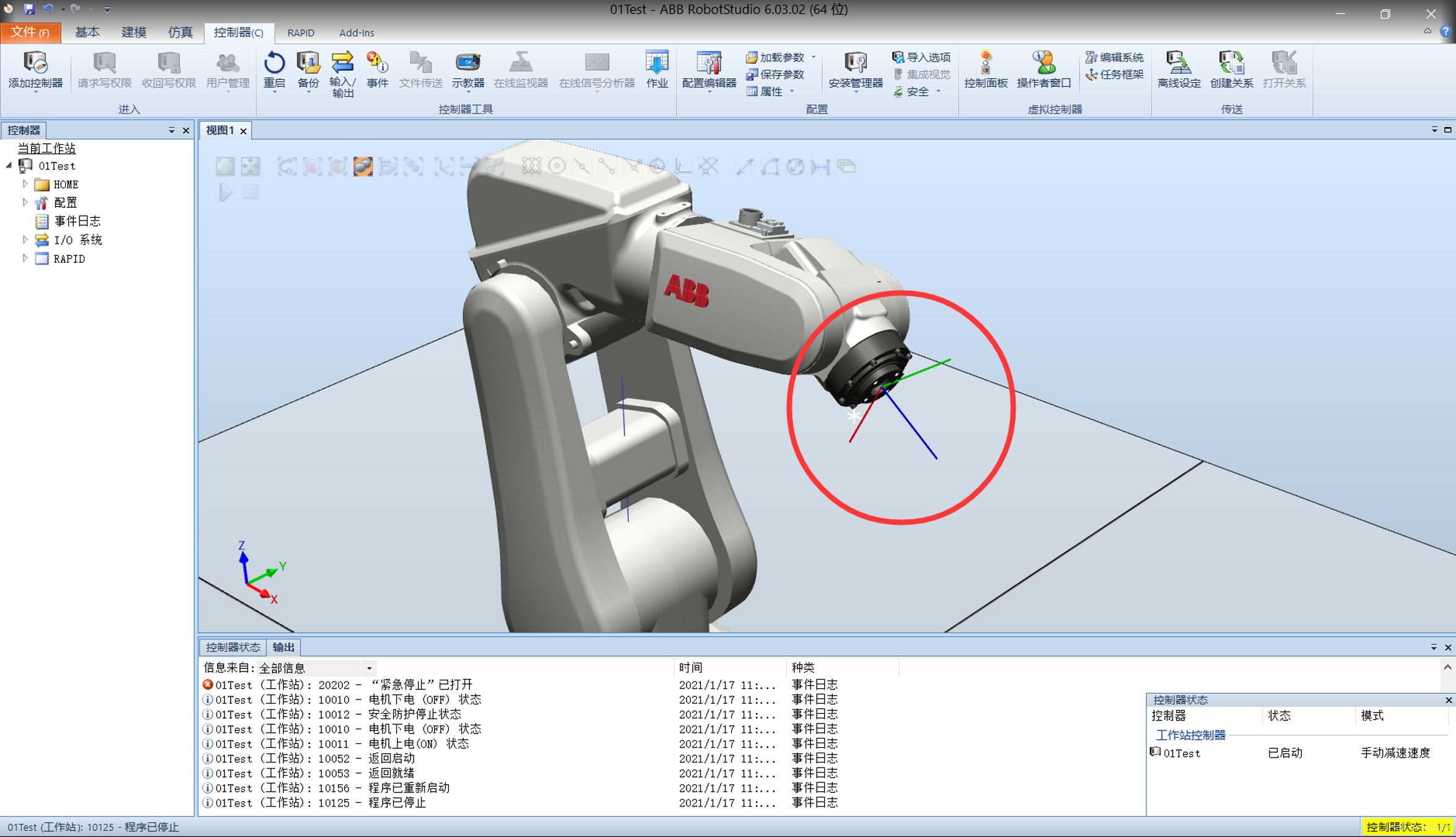
- 工具坐标,可以看到菜单栏有一项为工具坐标tool0,这个坐标系就是以机器人末端第六关节的坐标运动。
- 工件坐标,可以看到菜单栏有一项为工件坐标tool0,这个坐标系是以工件的坐标系运动。
重定位操作
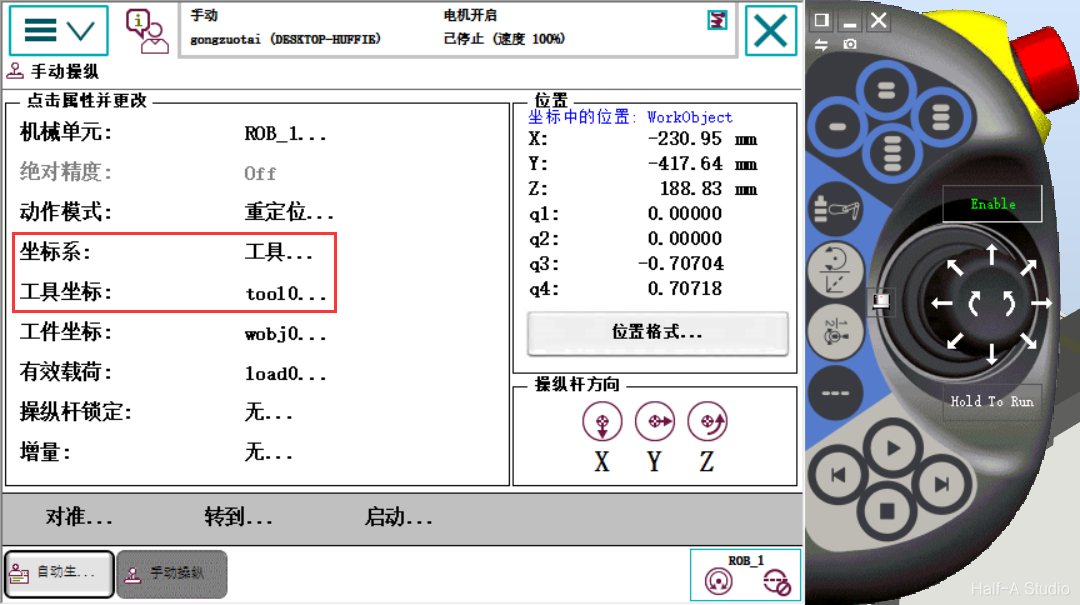
- 打开虚拟示教器,手动操纵-动作模式,切换动作模式为重定位。
- 回到手动操纵的菜单栏,可以看到此时的坐标系为工具,工具坐标为tool0
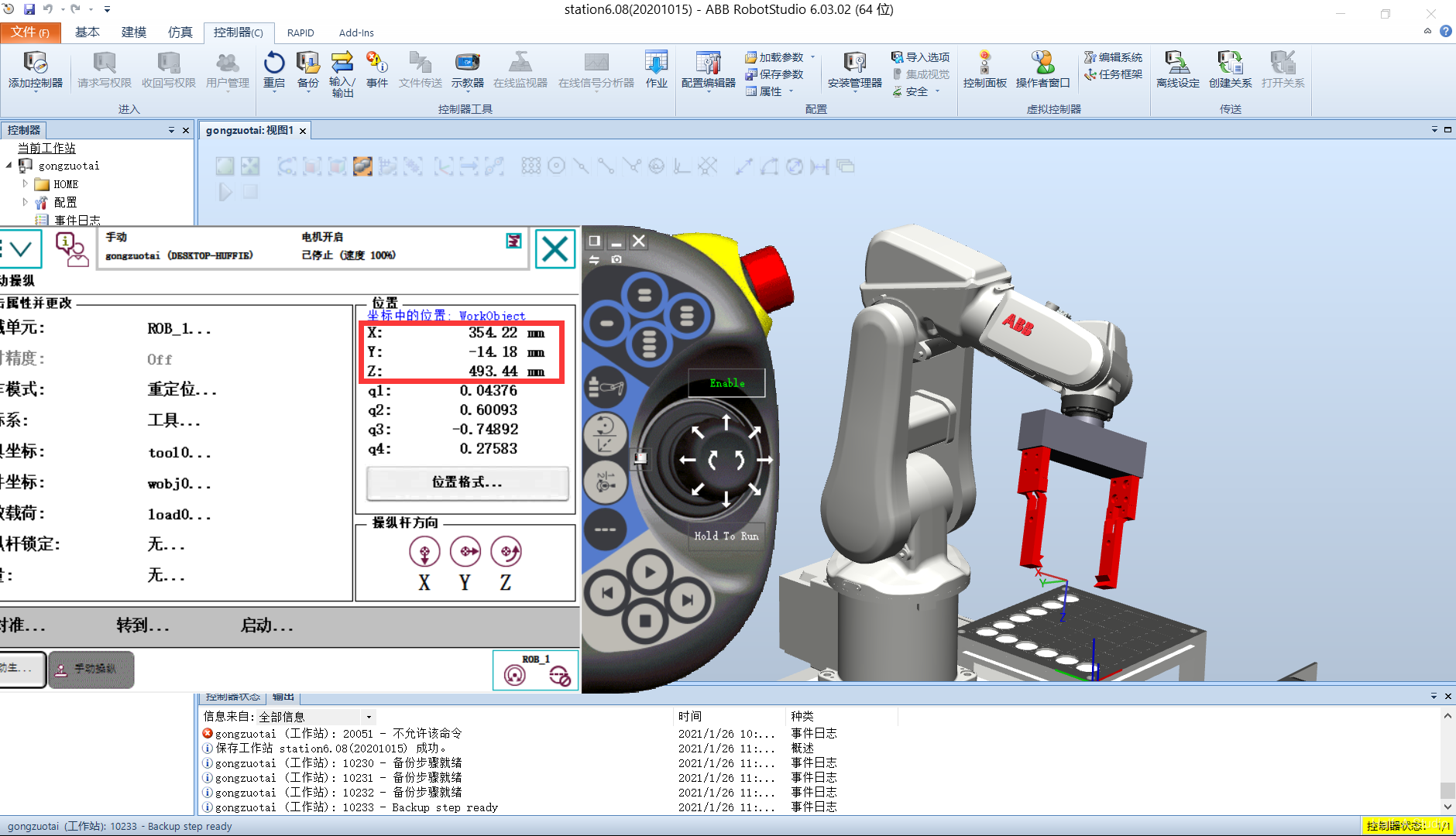
- 按下示教器的箭头,手动操作进行观察,可以发现位置坐标XYZ始终不发生变化。
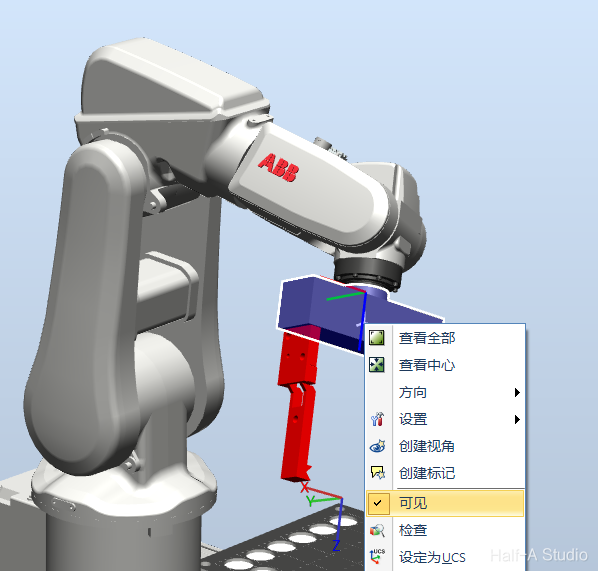
- 将爪子隐藏,可以看出系统运动过程中,第6关节末端中心点位置保持不变。
动作模式的切换
- 在摇杆的左侧切换操作模式,第二个按钮是切换重定位和线性,第三个按钮切换轴1-3和轴4-6。面板右下角显示当前操作模式。
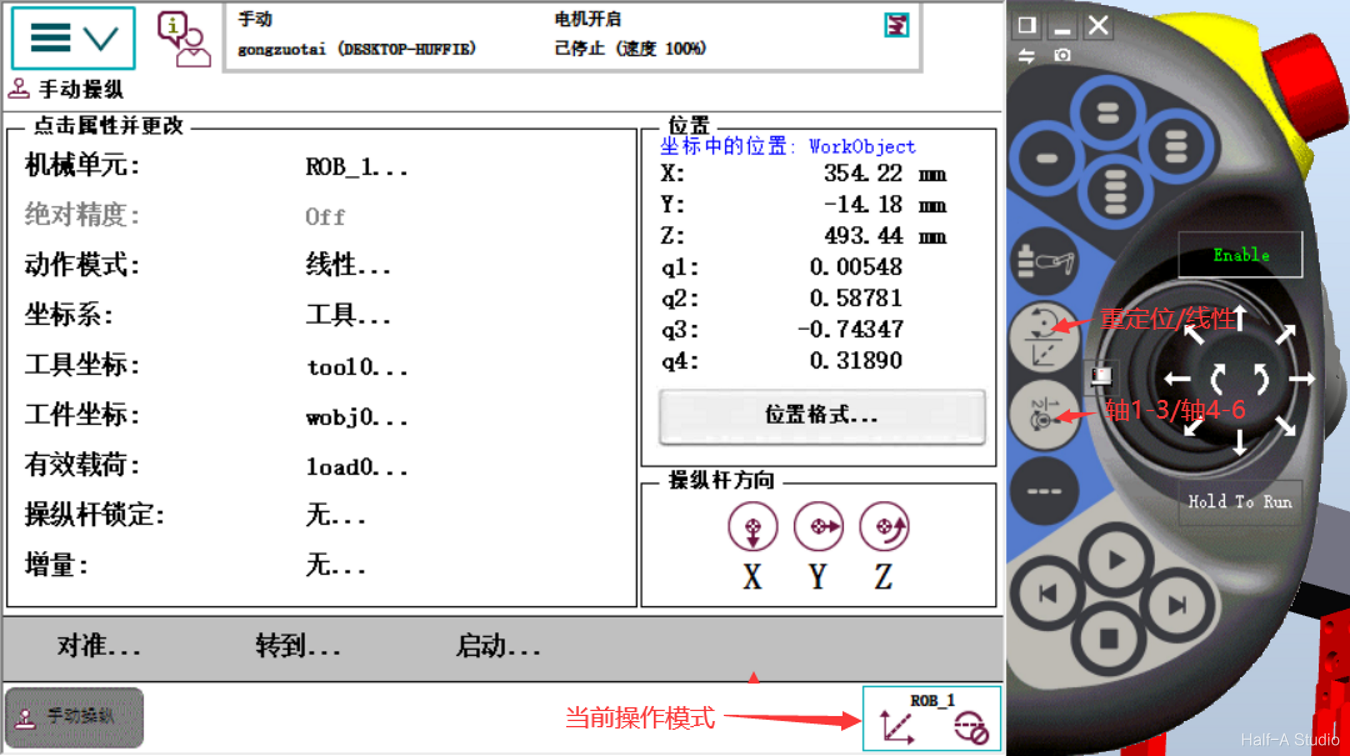
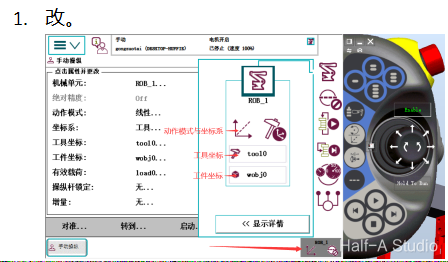
- 点击示教器右下角图标,可以看到机器人系统的详细信息,在这里同样可以对手动操纵菜单栏里所有的选项进行更改。


















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











